
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Автомобильные электронные системы 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 Зона управления 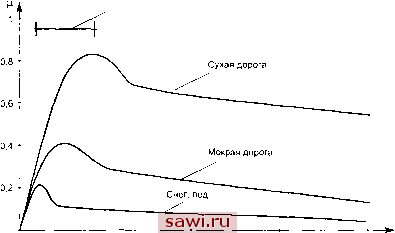 О 0,25 0,5 0,75 1 S Рис. 4.7. Зависимость силы трения ц от коэффициента скольжения S А,тгоритмы нечеткой логики можно встретить в программном обеспечении электронных систем автомобиля для определения УОЗ, управления подачей гоп-:!ива, управления дроссельной заслонкой в круиз-контроле, управления автоматической коробкой передач, в зарядных устройствах интеллектуальных аккумуляторов электромобилей. Автомобиль - сложный объект для управления. Например, система управления динамической стабильностью и курсовой устойчивостью движения на основе нечеткой логики использует 200-600 продукционных прави;!. Но срабатывание системы значительно ускоряется по сравнению с техническим решением на основе капибровочных диаграмм 17. Процесс разработки системы управления с нечеткой логикой функцио1П1рова-ния включает: определение лингвистических неременных, нечетких правил, метода де()а-зификации; отладку и анатиз программной модели; оптимизапию системы управления на базе персональной ЭВ.М с реальным объектом; генерацию кода для микроконтроллера реашной системы управления. Эти этапы обычно вьтолияются с использованием компьютеризированной системы CAD-fuzzy-TECH (например, версии 5.5). На пер1юм этапе при помоши программных продуктов, заноженных в luz/y-TliCH, задача формапизуется. .Здесь необходимо описать используемые .ппнви-стические переменные, их функции принадлежности, описать стратегию управления посредством нечетких правил. Ниже приводятся окна проекта с 01шсанисм лингвистических иереме1шьт\ Ti фис. 4.8), US (рис. 4.9) и HTR (рис. 4.10) для случая с автомобильны.м отопителем (см. рис. 4.5). На рис. 4.11 с помонпло табличного представления продукционных прави.1 описана стратегия нечеткой логики управления, отвечающая структуре проектируемой системы (рис. 4.12). В некоторых задачах вместо табличной используется матричная форма представления продукционных правил. -inlxt letm - iCVCOLD. -ХОШ COOL COMF WARM HOT 1.01 ICYCOLD COLD COOL COMF /vARM Ю.ООШ 0,0 о.дасй,  Рис. 4.8, Описание входной лингвистической переменной TI cold COOL COMF WARM o:8  29.1000. 0.0 r\/ V/ \:/\ X; .4:- 23 25 27 ; degrees Рис. 4.9- Описание входной лингвистической переменной US В HTR .lerm HTROFF HTRLO HTRMED HTRHI HTROFF :HTRLO HTRMED HTRHI HTBMAK 1.0 HTRMAX .0.8 q..6 if-zfmQm 0.0 АЛ У \, л Ih.ju.0.0000 О у :  Рис. 4.10. Описание выходной лингвистической переменной HTR В таблице (рис. 4.11) DoS - это весовой коэффициент соответствующего правила, в данном случае DoS = 1. Программный пакет fuzzy-TECH позволяет .моделировать поведение проектируемой системы. Изменяя значения входных переменных, можно наблюдать соответствующие значения выходных (рис. 4.13). Spreadsheet Rule Editai - RBI
Рис. 4.11. Табличное задание продукционных правил
Рис. 4.12. Структура проектируемой системы в окне проекта Пакет fuzzy-TECH допускает соединение физической линией связи ко.мпьюте-ра с разрабатываемой систе.мой управления и реального объекта управления в единый отладочный комплекс. Такой вид отладки позволяет наблюдать поведение системы в реальных условиях и при необходимости вносить изменения в проект. Установим охранное оборудование. Тел. . Звоните! | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||