
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Автомобильные электронные системы 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 5.8. Электронные карты 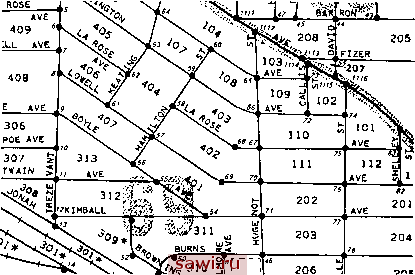 Рис. 5.21. Улицы и узлы на векторной карте Имеющиеся карты или изображения местности, полученные с самолетов и спутников, сканируются. Затем специа..1ьное программное обеспечение трансформирует изображение снача.,1а в матричный, а затем в векторный формат. Электронная карта несет такую информацию, как номера дорог, названия улиц, номера до.мов между перекрестками, одностороннее или двухстороннее дви-же}1ие на улице, названия отелей, ресторанов и т. д. 5.8.1. Ориентирование на карте местности по конфигурации пройденного пути Этот метод позволяет определить или уточнить текущие координаты автомобиля сравнением конфигурации пройденного пути (его участка), полученного нави-га1шонпым счислением с конфигурацией дороги, по которой движется автомобиль. На рис. 5.22 показано, как сравниваются и корректируются пути, полученные навигационны.м счислением с картой. Сначала навигационная система определяет, какие из близлежащих дорог могут соответствовать координатам авто- Точка контроля Дорожная информация Принятие решения - Коррекция позиции  Просмотр всех дорог Коррекция позиции Путь по навигационному счислению 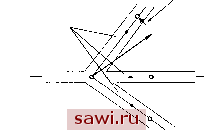 Рис. 5.22. Корректировка пути Рис. 5.23. Выбор пути на пересечении дорог 5.8.2. Выбор оптимального маршрута Кроме определения текущих координат автомобиля, навигацио1Н1ая система также может выдавать информацию, облегчающую выбор оптимального пути сле-хювания к месту назначения. Для этого навигационный ко.мпьютер рассматривает дорожную сеть между исходным пунктом и пунктом назначения и выбирает кратчайший маршрут. Примером метода определения кратчайшего пути по карте является алгоритм Дейкстра (Dijkstra algorithm). В алгорит.ме Дейкстра производится определение всех пересечений дорог от стартовой точки и вычисляются кратчайпп-ie пути до каж/лой точки пересечения. Например, если имеется дорожная сеть, как на рис. 5.24, а, поиск пересечений начнется от начальной точки Л, как показано па рис. 5.24, б. Сначала будут рассмотрены пересечения В и С. Расстояния от точки А до каждого из пересечений указаны внутри кружочков. Затем рассматриваются пересечения Е и F, соедипяю-итиеся с точкой С, для этих пересечений указано расстояние от стартовой точки А (рис. 5.24, б {!)). В-третьих, рассматриваются пересечения D и Е, соединенные с точкой В, иа рис. 5.24, б (3) указаны расстояния от стартовой точки А до D и Е. При этом расстоя1Н1е до точки Е указано через точку С, т. к. оно меньм1е. чем через D (было бы 8). Точка I) связана с точкой F, и маршрут через Е оказывается короче, это отражено на рис. 5.24, б (4). Кратчайн1им путем до D оказывается маршрут A-C-E-D. Таким образом для дорожной сети можно определить кратчайший маршрут до любого из пересечений (жирные линии на рис. 5.24, б (6)). Использование этого алгорит.ма позволяет определить кратчайший маршрут к месту назначения. Располагая со1фс.менной навигационной системой, водитель может не опасаться сбиться с пути.  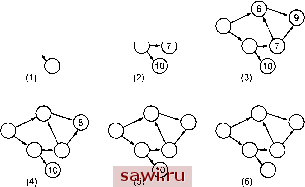 Рис. 5.24. Алгоритм Дейкстра мобиля, определенным навигационным счислением. Затем делается сравнение, как показано на рис. 5.22. Выбирается наиболее подходящая дорога и корректируются координаты автомобиля по карте. Когда автомобиль достигает перекрестка, выбор дороги определяется напраиденисм движения (рис. 5.23). Если дороги на перекрестке выглядят нри.мерно одинаково, как на рис. 5.23, навигационный компьютер прослеживает их но карте вперед и определяет коэффициент корреляции Д.1Я каждой из дорог по отношению к требуемому .маршруту. Выбирается дорога с наибольшим коэффициентом корреляции. 5.9. Спутниковая позиционирующая система GPS Навигационная информация сообщается водителю различными способами: от указания символом положения па карте местности до команд голосом через синтезатор речи о необходимости повернугь налево или направо. 5.9. Спутниковая позиционирующая система GPS Система GPS (рис. 5.25) может использоваться для определения абсолютных координат автомобиля. Она состоит из 18 основных и 3 запасных спутников на околоземных орбитах (радиус 20183 км, период обращения 12 часов), запущенных министерством обороны США в период с 1980 по 1992 год (програм.ма NA-VSTAR), и предназначена поставлять информацию об абсолютных координатах различны.м объекта.м: морским судам, самолетам, ракетам, воинским подразделениям, автомобилям и т. д. На спупнжах установлены атомные часы, периодически на Землю посылаются сигналы с информа1п-1ей о системном времени и пара-меграх орбиты )ia частоте 1,57542 ГГц. 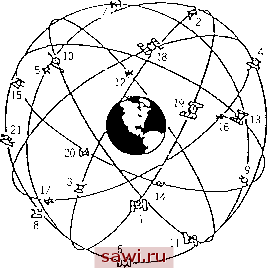 Рис. 5.25. Спутниковая система NAVSTAR Полыюватели обслуживаются сисгемой GPS по двум категориям: точное определение координат (Precise Position Service - PPS) - для Boeinibix и сландартная точ1ЮСть определения координат (Standard Position Service - SPS) - для остальных категорий нользо1зателей, в том числе и для автомобильной навигации. Теоретически достижима точность определения координат с ошибкой до 100 м, па практике координаты определяются с большей точностью - до 30 метров. Координаты прие.мника (А, У,2) и спутника (W, К/, И/) связаны соотношением: Pi = (х - ui)- + {Y - viY + (z - mf + R. Здесь Pi - расстояние между спутником и приемником, R - временная ошибка, возникающая из-за невозможности точно сшгхропизировать атомные часы Установим охранное оборудование. Тел. . Звоните! |