
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Автомобильные электронные системы 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 Канальный уровень Физический уровень LLC - Logical Link Control (управление логическим звеном) Фильтрация Обработка переполнения Ретрансляция MAC - Medium Access Control (управление доступом к среде) Кодирование кадра Управление доступом Обнаружение ошибок Сообщение об ошибках Квитирование Сериализация PLS - Physical Signaling (сигналы на физическом уровне) Кодирование битов Временные характеристики Синхронизация РМА - Physical Medium Attachment (подключение к физической среде) Характеристики шинных драйверов/приемников MDI - Medium Dependent Interface (интерфейс, зависимый от среды) Соединители Обработка ошибок MAC Обработка ошибок PLS Блок доступа к среде передачи данных Рис. 7.1. Уровневая архитектура CAN На физическом уровне определяются электрические характеристики соединителей, шинных адаптеров, двоичное кодирование, синхронизация. Физический ypoiiCHb разделен на три полуровня: .MDI (medium dependent interface) - подуровень интерфейса, зависимого от физического носителя (передающая среда); РМА (piiysical medium attaciiment) - подуровень подсоединения к физической среде; PLS (piiysical signaling) - сигналы на физическом уровне. На канальном уровне определяется формат кадра, обнаружение и передача ошибок во время трансляции, автоматическая ретрансляция данных, фильтрация. Канальный уровень разделен на два подуровня: MAC (medium access control) - управление доступом к среде; LLC (logic link control) - управление логическим каналом. Физический уровень контролируется функцией супервизора контроль шины , например, выявляются короткие замыкания или обрывы на линии. Канальный уровень контролируется функцией супервизора ограничение распространения последствий неисправности , например, различаются кратковре-.менные сбои и долговременные неисправности. 7.3. Передающая среда и нижние подуровни протокола CAN Протокол CAN главным образо.м предназначен для сетей с шинной тогюлогией и электрическими проводами в качестве канала связи (передающей среды). Могут применяться и другие передающие среды, способные поддерживать состояния высокого/низкого уровней, что необходимо ;гля осуществления побитового арбитража. 7.3. Передающая среда и нижние подуровни протокола CAN Меадународиая ор1анизация стандартизации определила стандарт ISO 1I5I9-2 для шин CAN со скоростью об.мена до 125 Кбит/сек и ISO 11898 для скорости обмена выше 125 Кбит/сек. Эти стандарты различаются только спецификациями нижних подуровней MD1 и РМА физического уровня протокола CAN в вопросах подюночения к передающей среде (шине). Подуровни MDI и РМА иногда называют блоком MALJ - medium access unit (блоком доступа к среде передачи данных). На рис. 7.2 показано под-ктючение к шине CAN в соответствии с этими стандарта.ми. Скоростной кансЫ связи образован двухпроводной линией (рис. 7.2, а), к обоим конца.м которой подю1ючены характеристические сопротивления пдя подавления отражений. Это дифферепциать-ная линия с 1юдавлением синфазных по.мех. За счет низкого характеристического сопротивления линия и.меет хорошую помехоустойчивость, особенно если использована витая пара. Медленный канат связи также выполнен двухпроводным (рис. 7.2, б). Концы линии через сопротивления R = 2,2 кОм подктючены к источникам напряжения различной величитл. Преи.муще-ство такой линии заключается в некоторой информационной избыточности, т. к. данные, по сути, дублируются и передаются независимо по двум проводам. В случае повреждения одного провода сетевые адаптеры могут быть реконфигуриро-ваны для работы в однопроводной линии, помехозащищенность при это.м ухудшится. За счет паразитной связи .между проводами линия более чувствительна к искажениям и не .может бьггь использована /ьтя высокоскоростного режима. ► Подуровень РМА (подю1Ю-чение к физической среде) определяет характеристики шинных драйверов и приемников. При этом линии шины CAN могут находиться в одном из двух состояний: доминирующего уровня (dominant) и недоминирующего уровня (recessive). Если один из узлов устанавливает шину в состояние до.минирую-щего уровня, оно будет установлено, независимо от состояний остальных узлов. Эти состояния Напряжение Высокая скорость обмена 120ohm 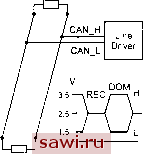 120ohm Низкая скорость обмена 3,25V 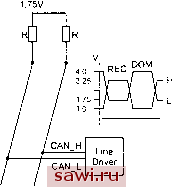 Рис. 7.2. Подключение к шине CAN Доминирующий уровень
Vdif Недоминирующий уровень V-CAN L V-CAN Н Время Рис. 7.3. Уровни напряжений в шине CAN  Рис. 7.4. Подключение драйвера к шине Когда логический уровень сигнала на входе Тх равен 1 , оба транзистора в выходном каскаде закрыты и выход драйвера находится в высокоймпедансном состоянии. Шина находится в состоянии педоминирующего уровня, дифференциа-лыюе напряжение примерно равно нулю, напряжение смещения около 2,5 В. При подаче сигнала О па вход Тх оба транзистора отпираются, дифференциальное напряжение становится равным около 2,5 В, шина переходит в состояние доминирующего уровня. Наличие цепи с.мещаюпхего напряжения гарантирует смену полярностей сиг-наюв на входах компаратора К при переходе шины от одного состояния к другому. 7.4. Подуровень PLS На подуровне PLS реализуются двоичное кодирование и синхронизация, определяется время передачи бита. ► Протокол CAN использует двоичное кодирование (NRZ-код), то есть во время передачи бита не может быть никаких переключений уровня, которые могли бы использоваться д.ля синхронизации (рис 6.26). Это предъявляет высокие требования к стабильности частоты генераторов (используются кварцевые). Прихо- определяются дифференциальным напряжением .между проводниками шины, называемыми CAN H и CAN L (рис. 7.3). Величина дифференциатыюго напряжения для состояния доминирующего уровня составляет 1,5...3 В, для состояния недоминирующего уровня--0,5...+0,05 В. Характеристики шинных драйверов задаются стандартом ISO 11898, где указаны все электрические спецификации. Например, .максиматьное число подк.лючае-мых к шине узлов не должно превышать 30. На рис. 7.4 схематично показано подключение линейного драйвера к скоростной шине. Установим охранное оборудование. Тел. . Звоните! |