
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Автомобильные электронные системы 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 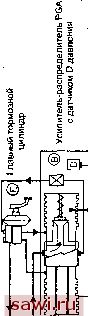 в о. £ ffl , 5 о i I = S 8 i S. £ S га < > со п D < t> у D < >1 © < t> < > Рис. 8.7. Гидравлическая часть системы VDC тормозною бачка гидросистемы в иентрашную камеру диффере1Н1иатьного гид- роусплигедя pga. При этом два плунжера в РОЛ начинают раздвигаться и нагнетают тормозную жидкость 3 насосы рециркуляции RCP под заданны.м да[!лением, которое формируется пружинными (i и 4) и электрическими (2) к,1апанами и по;Лдерживается ресиверами (3). Это приводит к тому, что поток жидкости, идущий от RCP, пода- ется в рабочие контуры FA и RA под давлением, которое является нормальным jiflii устойчивого функционирования системы VDC при низких температурах. Из соображений функциона-чьной належности и эксплуатацио]пюй безо/шспости системы VDC главный нагнетательный насос RCP снабжает тормозной жидкостью }iacocbi рециркуляции RCP через буферные камеры дифференциального гидроусилителя PGA. Электрические гидроктапаны 2 и 5 мо]ут отрабатывать две программы автоматического управления давлением в колесных тормозных цилиндрах (КТЦ) - программу ABS (торможения без блокировки колес) и программу VDC (курсовой устойчивости движения авто.мобиля избирательны.м гюдтормаживание.м колес с одновременным регулированием крутящего .момента двигателя). Эти программы хранятся в постоянном загюминающем устройстве (в ПЗУ) электронного блока управления. 8.4.4. Электронный блок управления Электронный блок управления (ЭБУ) содержит стандартную четырехслойную печатную плату с двумя частич1ю резервными микроконтроллерами 83C196KL. Каждый контроллер снабжен блоком постоянной пa4lтм объемом в 48 килобайт. На плате также установлены все запускающие и ком.мугирующие устройства для BKjiro4eHfH каншюв управления и контрольных ламп, полупроводниковые реле для подачи питания на .мощные электропотребители (гидроклапаны и нагнетательные насосы), цепи CAN интерфейса. В связи с увеличением количества управляющих сигналов CAN интерфейс интегрирован в микрочипы контроллеров и обеспечивает управляемый (по задаппой программе) обмен информацией межчу ЭБУ двигателя. ЭБУ ABS, ЭБУ активной подвески и функциона.п)Пыми блоками системы VDC. Связь осуществляется с помощью модифипировапной интерфейсной шины. 8.5. Результаты экспериментальных исследований 8.5.1. Испытания автомобиля с системой VDC при резком изменении направления движения Для оценки эффективности системы VDC проводились модель}1ые и нагурные испытания авто.мобиля во время маневра изменения траектории движения. Сравнивались два однотипных автомобиля, один из которых оборудован системой VDC. .Маневр осуществлялся путем резкого поворота рулевого колеса в положительную и отрицательную стороны с шагом 90°. Были приняты следующие начальные условия эксперимента: скорость автомобиля 40 м/с, положение педатей управления тор.мозо.м и акселератором во вре.мя маневра не изменялось; поверхность дороги однородна (сухой асфатьт), коэффициент трения между колесами и дорогой высокий (ц = 1,0). На рис. 8.8, а показаны сравнительные значения наиболее важных переменных величин, анализ которых осуществлялся в процессе .моделирования: угол поворота руля (град.), скорость рыскания (град/с), боковое ускорение (м/с), угол бокового ухода автомобиля (град.). На рис. 8.8, (5 показана моделируемая траектория движения автомобилей. На рис. 8.8, в выделена характерная часть траектории движения Угол поворота руля (град) Скорость рыскания (град/с) -180 а) -10
 2,5 О 2,5 Боковое ускорение (м/с) Угол бокового увода автомобиля (град) 201- с VI / сУРС Время (с) Путь автомобиля(м) 2,5 О -(-1-(- Время (с)
Va=40M/c  ШЭ безУОС 1 с VDC   Водитель берет влево. Порождение боковых сил Нарастающая неустойчивость вправо. VDC переключа- Автомобиль ется на переднее без VDC не правое колесо поддается контролю Водитель берет Воздействие VDC на переднее левое колесо. Стабилизация автомобиля Рис. 8.8. Испытание автомобиля с системой VDC при изменении траектории движения автомобилей и результирующая сила на каждом колесе в контрольных точках этой траектории. После первого входного воздействия поворотом рулевого колеса на 90° обычный автомобиль показывает возникающую неустойчивость (на рис. 8.8, в гюз. 2), которая следует из-за задержки появления боковой силы иа задних колесах (по сравнению с передними). На поз. 3 рис. 8.8, в угол поворота рулевого колеса из- Установим охранное оборудование. Тел. . Звоните! | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||