
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 ную (рис. 3.8, а). В этой схеме намагничивающий контур вынесен к входным зажимам, к которым подается напряжение Ui. Сопротивление намагничивающего контура в Г-образной схеме берется равным (Zm+Zi) и по нему протекает фиктивный ток холостого хода /а , равный току /о в Т-образной схеме при идеальном холостом ходе, когда s=0. Ток h в рабочем контуре Г-образной схемы определяется из условий неизменности тока /i = /a +(-/2 ). откуда .. i(i + z2,/z ) ir, -/2 = /l -/й=------- Cii+CiZ) Ci (3.32) где /2 и h - токи рабочих контуров в Г- и Т-образной схемах замещения, при этом сопротивление рабочего контура в Г-образной схеме замещения Zp.K=Ci (Zi-f C,ZL)=C,Zi-f C?Z2-f 6?/?;(1-5)/5. (3.33) Обычно погрешность в определении токов в статоре и роторе при переходе от Т- к Г-образной схемам замещения не превышает нескольких процентов. В практических инженерных расчетах комплекс Ci часто заменяют модулем Си который для асинхронных двигателей мощностью 10 кВт и выше равен 1,02... 1,05. При анализе электромагнитных процессов в машинах общего применения часто полагают Ci l, что существенно облегчает расчеты и мало сказывается на точности полученных результатов. Г-образную схему замещения при Ci = l называют упрощенной схемой замещения с вынесенным намагничивающим контуром (рис. 3.8, б). В этой схеме ток /о без большой погрешности можно приравнять току Iq. 3.4. Круговвя диаграмме асинхронной машины Наглядное представление о количественных и качественных соотношениях токов, мощностей и напряжений в отдельных элементах асинхронной машины дает круговая диаграмма. Она является, по сути дела, векторной диаграммой схемы замещения асинхронной машины с некоторыми дополнительными построениями. Круговая диаграмма позволяет определить графически все величины для построения рабочих характеристик двигателя. Обосноваиие круговой диаграммы. В основу построения этой диаграммы положена упрощенная схема замещения с вынесенным намагничивающим контуром (рис. 3.8, б), для которой ток в обмотке статора А==/о + (~2)- В данной схеме ток намагничивающего контура неизменен: = 1/(£л.+£.) = const и его вектор /о отстает от вектора напряжения Cfi на угол фо (рис. 3.9, а), причем tg?o = (m + l)/(?m + /?l)- Так как (Хщ-Ь i) > (/?m+/?i), угол фо близок к я/2. 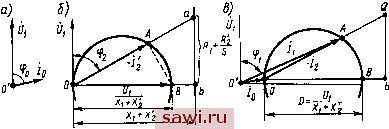 Рис. 3.9. Упрощенные векторные диаграммы асинхронной машины Ток -/2 замыкается по контуру, называемому рабочим (см. рис. 3.8, б). В этом контуре имеются неизменные индуктивные сопротивления Xi и Х2 и переменное активное сопротивление (Ry + Ri/s), поэтому ток рабочего контура будет изменяться при изменении скольжения. Ток -/2 максимальное значение принимает при некотором скольжении, соответствующем сопротивлению рабочего контура Ri+R2/s=0. В этом случае ток -/2 будет реактивным и величина его l2max=Ui/{Xi+X2). Можно доказать, что при изменении активного сопротивления рабочего контура конец вектора тока -h перемещается по окружности ОАВ, диаметр которой ОВ (рис. 3.9, б) в масштабе тока m-i соответствует максимальному значению тока /2тах. Для этой цели отложим на оси абсцисс отрезок Ob, равный в масштабе сопротивлений mz реактивному сопротивлению рабочего контура {Х1 + Х2), а из точки b перпендикулярно оси абсцисс - отрезок Ба, равный в том же масштабе активному сопротивлению {R1 + R24S) этого контура при заданном скольжении s. Отрезок Оа=]Ob--ba в масштабе сопротивлений представляет собой величину полного сопротивления рабочего контура при заданном скольжении Zp K= Из подобия прямоугольных треугольников ОЬа и ОВА можно найти, что ГГ ШОЬ 2тах{\ + д Cfl 2 Тангенс угла между осью ординат и отрезком OA 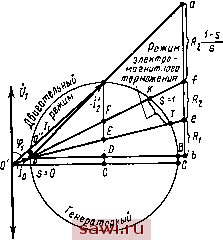 Таким образом, отрезок OA по величине и по направлению соответствует вектору тока -t. Так как построение велось при произвольном значении скольжения s, можно утверждать, что конец вектора тока -1 перемещается при изменении режима работы по окружности ОАВ. Совместив начало вектора тока- с концом вектора /о, получим векторную диаграмму токов для упрощенной схемы замещения с вынесенным контуром согласно рис. 3.8, б, которую называют круговой диаграммой токов асинхронной машины (рис. 3.9, в). В этой диаграмме ток /ijB масштабе mt равен отрезку ОА, ток V - отрезку OA, а годографом векторов этих токов является окружность диаметром ОВ. Определение мощностей и электромагнитного момента по круговой диаграмме. Помимо токов по круговой диаграмме можно также определить мощности, электромагнитный момент и другие величины, определяющие режим работы машины. Для этого сделаем ряд дополнительных построений (рис. 3.10). Мощность Р\, подводимая при двигательном режиме работы машины из сети к статору, пропорциональна активной составляющей тока статора Iia=h cos фь Поэтому в масштабе мощностей гпр она изображена отрезком АС, перпендикулярным линии OG, т. е. Pi=ACmp. В соответствии с этим линию OG называют иногда линией подведенной мощности (в общем случае линией электрической мощности, подводимой к машине из сети или отдаваемой ею). Мощность, подводимая к намагничивающему контуру, равна практически магнитным потерям АРм в стали статора. Она пропорциональна активной составляющей тока холостого хода и изображается поэтому отрезком DC, т. е. АРм=ОСтр. Мощность, подводимая к рабочему контуру Рр.к, пропорциональна активной составляющей тока /г; следовательно, она изо- Ре/ким Рис. 3.10. Упрощенная круговая диаграмма асинхронной машины бражается отрезком AD, т. е. Рр.к=АОтр. Эту мощность целесообразно разделить на отдельные составляющие: Pp.Krn/i [/?1+/?2 + /?2(1 -5)/5] , (3.34) где т1/2?1=Д/эл1-электрические потери в обмотке статора; mJiRi = АР эл2 - электрические потери в обмотке ротора; mJi{\-s)ls=Puex - механическая мощность ротора. На круговой диаграмме разделение мощности Рр.к. на составляющие можно осуществить графически. Для этого на продолжении диаметра окружности откладывают отрезок Ob, изображающий в масштабе /Пг сопротивление {ХуЛ-Х). Из точки b восставляют перпендикуляр к линии ОЬ и в том же масштабе откладывают отрезки be и ef, соответствующие R\ и Rz. Продолжив прямую OA до пересечения с перпендикуляром к линии Ob, получают точку а. Очевидно, что отрезок аЬ равен сумме активных сопротивлений в цепи рабочего контура. Соединив прямыми точку О с точками ей/, получают на отрезке AD соответственно точки Е и F, разбивающие отрезок AD в соотношения: DE : EF : FA=Ri : Rs: Rs{I-s)ls. Следовательно, отдельные составляющие мощности Рр.к запишутся как LP:,x = m\ AP j=mpfF; Р =т. (3.35) Расположение прямых Of и Ое не зависит от режима работы машины, поэтому они являются неотъемлемой частью круговой диаграммы. Обычно на диаграмме не показывают линию аЬ и составляющие ее отрезки, а ограничиваются тем, что доводят линии Of и Ое до пересечения с окружностью токов, получая точки К н Т. Линию ОК, до которой изменяется механическая мощность, называют линией механической мощности, а линию ОТ - линией электромагнитной мощности, так как отрезок АЕ характеризует электромагнитную мощность, подводимую к ротору: /эи = Рме. + А/эл2 = - р- (3.36) Величина электромагнитного момента двигателя пропорциональна электромагнитной мощности P3u=MQi, так как угловая скорость вращения магнитного поля Qi постоянна. Следовательно, М = P,JQi = АЕ- niplQi=АЕ-тм, (3.37) т. е. отрезок АЕ в некотором масштабе моментов гпм представляет собой величину вращающего момента М, поэтому линию ОТ называют также линией моментов *. Приведенные на рис. 3.10 построе- * При работе машины в генераторном режиме линия ОК представляет собой лннню подводимой мощности, а лнння OG - лннню отдаваемой мощности. ния являются основными, позволяющими анализировать работу асинхронного двигателя по круговой диаграмме. Часто осуществляют также дополнительные построения, позволяющие определять по круговой диаграмме скольжение и КПД. Характерные точки круговой диаграммы. Найдем скольжение для некоторых характерных точек круговой диаграммы. В точке О, определяющей режим холостого хода при идеализированных условиях (когда ток ротора равен нулю), скольжение 5=0. При реальном холостом ходе машина потребляет из сети некоторую мощность для покрытия механических потерь. При этом скольжение отлично от нуля и точка реального холостого хода О располагается на круговой диаграмме несколько выше точки О. В точке К скольжение можно определить из условия, что результирующее активное сопротивление цепи рабочего контура равно /?р.к=/?1+/?2 +/?2(1 - Sk)/Sk=/?i+/?; (3.38) Решая (3.38), найдем, что Sk=1. Следовательно, точка К соответствует неподвижному ротору, т. е. режиму пуска (начальному моменту пуска) или короткого замыкания. Отрезок ОК представляет собой ток ротора /2к - в режиме короткого замыкания, а отрезок ОК - ток статора /и в этом режиме. В точке Т результирующее сопротивление рабочего контура /?р.к = /?1 + /?2+/?2 (1 - s,)!s,=R (3.39) откуда St= ± оо. Таким образом, режим работы машины, соответствующий точке Т, может быть представлен только теоретически. Точки О, К я Т делят окружность токов на три части, соответствующие работе машины в режимах: двигательном (часть OAK), генераторном (часть ОВТ) и электромагнитного торможения (часть КТ). В двигательном режиме, когда 0<П2<Л1, скольжение изменяется от 5=1 до 5=0, т. е. конец вектора тока h перемещается по окружности от точки К до точки О. В генераторном режиме, когда Л2>Л1, скольжение изменяется от s=0 до s=-оо, т. е. конец вектора h перемещается по окружности от точки О до точки Т. В режиме электромагнитного торможения, когда Л2<0, скольжение изменяется от s=l до 5= + оо, т. е. конец вектора h перемещается по окружности от точки К до точки Т. Определение скольжения s и КПД по круговой диаграмме. Скольжение 5=ДЯ л2/Я м можно найти по круговой диаграмме как отношение отрезков FE/AE. Однако поскольку измерение малого отрезка FE может дать существенную погрешность, для определения S лучше построить шкалу скольжения (рис. 3.11, а). Для этого на произвольном расстоянии от линии OG проводят прямую, параллельную линии ОТ, до пересечения ее с линией ОК (или с ее продолжением) и получают точку N. Затем из точки О восставляют перпендикуляр к диаметру окружности до пересечения с построенной ранее прямой и находят точку Р. Линия OA (вектор тока -/г) пересекается с прямой PN в точке Q. Из подобия полученных при таком построении треугольников (AOFEAOPN и АОАЕAOPQ) запишем: EFIOP=OE/PN; OP/AE=Pq/0E. Перемножая эти отношения, найдем ЕЕ/АЁ =PQIPN=s. (3.40) Следовательно, отрезок PN представляет собой шкалу скольжения, на которой отрезок PQ, отсекаемый линией OA (вектором -h), дает в определенном масштабе величину скольжения s. Зная скольжение s, по формуле Л2=Л1(1-s) можно определить частоту вращения ротора. 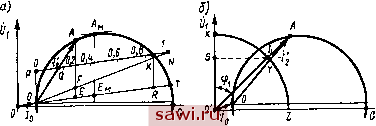 Рис. 3.11. Построение на упрощенной круговой диаграмме шкалы скольжения (а) н шкалы cos ф1 (б) Величину С08ф1 можно определить по круговой диаграмме, если построить на ней дополнительную шкалу. В качестве такой шкалы используют отрезок ОХ (рис. 3.11, б), отсекаемый на оси ординат вспомогательной окружностью XYZ произвольного радиуса (его целесообразно принять равным 100 единицам длины). Для определения созф1 на линию ОХ проектируют отрезок OY, полученный путем пересечения линии OA (вектора тока /i) с окружностью XYZ. При этом отрезок OS в определенном масштабе дает величину СОЗфь КПД асинхронного двигателя можно определить из круговой диаграммы как отношение отрезка AF/AC, принимая ОК за линию полезной мощности. Однако для получения более точных результатов рекомендуется определять КПД путем расчета отдельных видов потерь. Построение круговой диаграммы по экспериментальным данным. Данные для построения круговой диаграммы определяют Установим охранное оборудование. Тел. . Звоните! |