
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 машины, особенно коронок зубцов при полузакрытых и закрытых пазах, что эквивалентно расширению шлица паза а (рис. 3.18, а). Это приводит к уменьшению потоков рассеяния Фа и, следовательно, индуктивных сопротивлений обмоток статора и ротора. При этом диаметр круговой диаграммы увеличивается. Одновременно из-за увеличения частоты тока в роторе ток в его проводниках вытесняется в верхние их части (см. более подробно в § 5.3), вследствие чего увеличивается активное сопротивление обмотки ротора. Эти причины приводят к тому, что при расчете пускового тока /пуск приходится строить новую окружность 2 (рис. 3.18, б) с диаметром b2=i/i/(Xin-fХгп), большим, чем диаметр Di = = i/i/(Xi oM-f Ханом) окружности ), построенной для токов, близких к номинальному, так как индуктивные сопротивления для пускового режима (Хщ и Хгп) меньше чем (JiHOM-f Ханом) для номинального. В результате годографом тока является уже не окружность, а кривая ОК, близкая к эллипсу. Кроме того, при учете изменения активных и индуктивных сопротивлений схемы замещения изменяется и положение точки К по круговой диаграмме, т. е. положение линии механической мощности ОК. По указанньЛм причинам по круговой диаграмме можно получать достоверные данные только для токов, не превосходящих номинальный. Все вышесказанное относится только к машинам большой и средней мощности. В машинах малой мощности, и особенно в микромашинах, где ток холостого хода очень велик, все величины, необходимые для построения характеристик двигателя, определяют по точной схеме замещения (рис. 3.5, а). При этом параметры этой схемы из-за малых размеров проводников и небольшой индукции в зубцах остаются практически неизменными при разных токах нагрузки. Для асинхронных исполнительных двигателей круговые диаграммы обычно не применяют, так как точка К, соответствующая 3=1, лежит на диаграмме очень близко к точке холостого хода и диаграмма утрачивает свою наглядность. Вопросы для самоконтроля 1. В чем отличие работы асинхронной машины прн неподвижном н вращающемся роторе? Как зависят ЭДС н частота тока ротора от скольжения? 2. Как зависит электромагнитный момент асинхронной машины от магнитного потока н тока ротора? 3. Какая часть схемы замещения эквивалентна механической нагрузке па валу двигателя? 4. Для чего Т-образную схему замещения преобразовывают в Г-образную? 5. По каким экспериментальным данным строят упрощенную круговую диаграмму? 6. Как определяют по круговой диаграмме токи статора и ротора, мощности, электромагнитный момент, потерн мощности и скольжение для произвольного режима работы двигателя?  Характеристики асинхронного двигателя Выбор асинхронного двигателя для электропривода осуществляют на основе анализа его характеристик -механической и рабочих. Построение этих характеристик может быть выполнено путем расчета по схеме замещения или по круговой диаграмме. Высшие гармоники магнитного поля оказывают вредное влияние на механическую характеристику и энергетические показатели машины, так как создают добавочные моменты и потери мощности. Путем рационального проектирования двигателей можно существенно уменьшить добавочные моменты и потери. 4.1. Механическая характеристика Аналитическое определение зависимости электромагнитного момента от скольжения. Наибольшее значение для оценки свойств асинхронного двигателя имеет механическая характеристика, представляющая собой графическую зависимость частоты вращения ротора Пг от вращающего момента М, т. е. n2=f{M) или M=f (лг). Иногда эта зависимость выражается в виде M=f{s) или М= =/(v), где \=Л2/Л1 - относительная частота вращения. При этом S = (ni -Л2)/Л1=1-V. Использование понятий относительной частоты вращения и скольжения придает механической характеристике более общий характер. Для построения механической характеристики можно воспользоваться круговой диаграммой или формулой Af=- (4.1) которая получена из формулы M=APaj,2/{QiS)=miI2R2/{Q\s) подстановкой значения тока l2=Cil2 из схемы замещения (см. рис. 3.8, а): /2=(/,/1/(/?, + CMi- (AT, +CiX2f. (4.2) Для машин мощностью более 10 кВт величина Ci l и (4.1) приобретает более простой вид niiURi (4.3) Задаваясь значениями s при известных параметрах двигателя, можно определить М и построить искомую механическую характеристику.
Генератор ЦВигатт Элеитрамагнит- 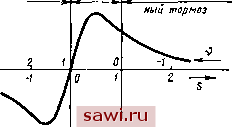 Рнс. 4.1. Механические характеристики асинхронной машины На рис. 4.1. а. б приведены механические характеристики, типичные для асинхронных двигателей общепромышленного применения. Механическая характеристика имеет максимум момента при частоте вращения Пг (0,8... 0,9)ni; при частоте вращения п2=п1 момент равен нулю, а при Л2=0 пусковой момент Мп=(0,3... 0,7)Мтах. Скольжение, при котором момент имеет максимальное значение (критическое скольжение), можно определить из (4.1), взяв производную от момента по скольжению dM/ds и приравняв ее к нулю. Решая уравнение относительно s, получим критическое скольжение 5кр= ±с,/?2 / / Ri+{x,+CyX2Y. (4.4) В первом приближении, принимая Ci = l и пренебрегая величиной Ri в знаменателе (так как Ri< {Х1+Х2)), получим s.p=±Ry{Xy + X2). (4.4а) Необходимость иметь высокий КПД заставляет снижать R2, вследствие чего максимум момента асинхронного двигателя имеет место при относительно высоких частотах вращения. Максимальный момент получим из (4.1), подставляя значения 5кр из (4.4): (4.5)  или приближенно считая Ci = l и /?i = 0. M ±m,UV[2QAX, + X2)]. (4.5а)  Знак -f относится к двигательному режиму, - -к генераторному. Максимальный момент при генераторном режиме несколько больше, чем при двигательном, так как в генераторном режиме в . (4.5) сопротивление Ri принима- ji ется со знаком минус и знамена- о-*-тель этой формулы уменьшается J, по сравнению с его значением (i для двигательного режима. Из (4,5) видно, что максимальный момент не зависит от активного сопротивления ротора. Оно определяет лишь скольжение skp при максимальном моменте. I/, Отношение Мтах/ЛГном=йм определяет перегрузочную способность электродвигателя. Значение kyi - кратность максимального момента - регламентируется ГОСТом и составляет для двигателей общепромышленного применения 1,7 ...2,2. У двигателей, предназначенных для работы с большими перегрузками (крановые, металлургические и т. п.), значение может достигать 3,5. ГОСТом оговаривается также минимально допустимый вращающий момент Mmin, отношение которого к номинальному моменту должно быть не менее 0,6... 1.
Рис. 4.2. Схемы замещения для аналитического определения характеристик асинхронного двигателя На заводах электропромышленности для аналитического определения свойств трехфазных асинхронных двигателей исходят из схемы замещения, представленной на рис. 4.2, а. Эта схема отличается от общепринятых включением на выводы внешней цепи резистора потери в котором равны магнитным потерям в стали АРм (основным и добавочным). Предполагается, что эти потери определяются полным магнитным потоком, создаваемым обмоткой статора (включая и поток рассеяния). Очевидно, если пренебречь падением напряжения в активном сопротивлении обмотки статора, то этому потоку соответствует напряжение внешней цепи. Исходя из этого Для первоначального анализа и определения зависимости электромагнитной мощности (момента) от скольжения схема замещения может быть упрощена (рис. 4.2, б). Для этой схемы замещения, заменяя сопротивления Х2, Рг/з и Хт эквивалентным сопротивлением ZaKB, можно записать следующие соотношения: где Zm=jXm\ Z2,=/?275-f-/X2; (4.6) /?3k.= (m ?2/5) (4.7) (4.7a) Ha основании этих соотношений схема замещения, изображенная на рис. 4.2, б, преобразуется в схему на рис. 4.2, в, где все сопротивления включены последовательно и по ним протекает ток /. Полное сопротивление этой цепи + / [1 + т-/?зкв(т + 2)/(/?2/5)]. (4.8) Токи статора и ротора определяются на основании схемы замещения рис. 4.2, г, которая может быть получена из схемы рис. 4.2, в. Во всех схемах (рис. 4.2) сопротивления Ru Rm, Хи Х и Хт - постоянные, а /?экв и Хэкв - зависят от скольжения. В соответствии со схемой замещения (рис. 4.2, в) электромагнитная мощность эм=m,PR ,=m,U\R,JZ\ (4.9) Подставив значения Z из (4.8) и /?экв из (4.7), получим следующую зависимость электромагнитной мощности от скольжения: Яэм = щи\1 {r;/s -f 2R, i-Rh) (4.9а) (4.10) или электромагнитного момента M = m,Ub[Qi{R2ls + 2R,-\-R 2S )], где R2 = Rim/XrnV + (1 + ХМЬ R2- = R2{[(Ri/R2) (1 + + X2/Xm)Y +[(Х, ?2) (1+Х2Дт) +X2/R2Y}- Решим (4.9а) относительно s: {m,Ub2P3 -Ri)± Vi iUb2P3.-R:V-R2lR 2] /RI (4.11) Двигательному режиму в (4.11) и (4.15) соответствует перед корнем знак минус, а генераторному - знак плюс. Выражение (4.10) позволяет определить максимальное значение электро.магнитного .момента: Ж з, = т,и1/ [2 (r, + У)] 2i (4.12) и соответствующее ему критическое скольжение s,p=±V RlIRl (4.13) Значение пускового момента получим из (4.10), положив s=l, M =m,UV{R2+Rl+2R,)Q,. (4.14) Зависимость механической мощности Рмех от скольжения можно получить из выражения Рмех=Рэм(1- ), подставив в него Рэм из (4.9а). Решив полученное уравнение относительно s, имеем s==- (mif/?/2P ex-l) ± V (/ if/?/2P , - RiY-Rl (/?2+/ if/?/P ex) \IP мех + 2 (4.15) Таким образом, по параметрам схемы замещения можно для любого значения мощности Р2 определить соответствующую ей механическую мощность ехг + А/мех + Д/д. где АРмех и АРд -соответственно механические и добавочные потери; а затем найти непосредственно скольжение и все характеристики двигателя, не прибегая к методу последовательных приближений, свойственному круговым диаграммам. Для расчета Skp, Afmax и Мп для двигателей с переменными параметрами необходимо в соответствующие выражения подставлять значения Р2, Х\ и Х2, определенные с учетом вытеснения тока в стержнях и насыщения путей потоков рассеяния. Установим охранное оборудование. Тел. . Звоните! | |||||||||||||||||||||||