
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 (рис. 4.9, а). Прямая гармоника статора с амплитудой 5ivm вращается относительно статора с частотой тНг- Обратная гармоника ротора с амплитудой Bovm вращается относительно ротора с частотой -5\П\1\г= - (п\-П2)Нг, а относитсльно статорз - с частотой 2-( I- 2)/vz. Таким образом, гармоники Vzp и Vzc вращаются по отношению друг к другу с частотой 12 = l/z-I 2-( l- 2)Azl- (4.38) в общем случае при 8\=ф\ гармоники ротора и статора вращаются несинхронно и их взаимное расположение определяется углом YI2, непрерывно изменяющимся в соответствии с изменением частоты вращения 12. Электромагнитный момент Мсм, возникающий в результате взаимодействия магнитных полей статорной и роторной гармоник, определяется взаимным расположением этих полей и пропорционален sinYi2- При 712=0 и я он равен нулю, при У12=±я/2 - максимален и направлен в сторону (против) вращения ротора. Воздействие на ротор этот момент оказывает только в том случае, когда магнитные поля статорной и роторной гармоник взаимно неподвижны ( 12=0), т. е. когда п\1\г==П2-(п\-П2)1\г- В рассматриваемом случае этот режим имеет место при частоте вращения ротора /t2=2/ti(v--l). (4.38а) В общем случае синхронные моменты в результате взаимодействия первых гармоник зубцового порядка создаются при двух возможных вариантах между числами пазов статора и ротора. При Z\=Z2 совпадают гармоники vzc=vzp полей статора и ротора, вращающиеся в одинаковом направлении; при этом синхронный момент возникает при неподвижном роторе. В этом случае ротор не обладает запасом кинетической энергии и если синхронный момент больше основного пускового момента двигателя, ротор не может сдвинуться с места. При Z2-Zi = ±2p совпадают гармоники полей статора и ротора, вращающиеся в противоположных направлениях, и синхронный момент создается при частоте вращения ротора п2, указанной в (4.38а). В зависимости от взаимного положения зубцовых гармоник полей статора и ротора создается двигательный (когда гармоника поля статора опережает гармонику поля ротора) или тормозной (когда она отстает от гармоники поля ротора) момент. Этот момент изображается на механической характеристике (рис. 4.9, б) в виде определенной точки на вертикальном отрезке между двумя пределами ±iWcvm, которые соответствуют углу у12=±я/2 между указанными гармониками. Из-за действия синхронного момента двигатель при пуске может застрять на частоте вращения п2 и не достигнуть нормальной частоты. Однако рассматриваемый момент действует при пуске весьма кратковременно и обычно легко преодолевается за счет кинетической энергии вращающегося рото- ра. Поэтому синхронный момент, возникающий при ПгтО, менее опасен, чем асинхронный. Для уменьшения этих моментов целесообразно также осуществить скос пазов ротора на одно зубцовое деление, так как это вызывает соответствующий сдвиг в пространстве взаимодействующих гармоник полей статора и ротора вдоль оси машины. Вибрационные моменты и силы возникают в асинхронной машине при взаимодействии высших пространственных гармоник статора и ротора, образующих магнитные поля с различными числами полюсов. Взаимодействие их происходит не только при синхронном вращении этих полей (когда они образуют син- Статор Ротор 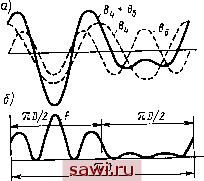 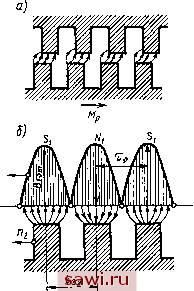 Статор Ротор Рис. 4.10. Схема возникновения вибрационных сил от высших гармоник магнитного поля Рис. 4.11. Схема возникновения реактивных моментов от высших гармоник магнитного поля хронные моменты), но и при других частотах вращения. В этом случае вращающиеся поля образуют периодически изменяющиеся вибрационные моменты, которые в течение одного полупериода направлены в сторону вращения ротора, а в течение последующего полупериода - в противоположном направлении. Наряду с вибрационными моментами при взаимодействии указанных магнитных полей возникают радиальные силы, вызывающие одностороннее притяжение ротора к статору и биения ротора. При приближении частоты биений к частоте собственных колебаний ротора наблюдается односторонний провал (при двигательном режиме) или всплеск (при генераторном) результирующего момента, сопровождающиеся значительным шумом. Вибрационные силы и моменты, обусловленные зубцовыми гармониками, проявляются особенно сильно, если в воздушном зазоре машины существуют магнитные поля, числа полюсов которых 2pi и 2р2 близки друг другу, т. е. при условии Z]-Z2==±l±2p или zi-Z2=±2±4p. Например, при наличии двух магнитных полей с числами полюсов 2р=4 и 2р=6 и индукциями Bi и Be (рис. 4.10, а) образуются радиальные силы притяжения /, мгновенные значения которых (рис. 4.10, б) пропорциональны (Bi + Be). При этом сумма сил 2/ на одной половине окружности лЬ/2 ротора (площадь кривой /, ограниченная длиной nD/2) значительно больше, чем на другой половине, что приводит к неуравновешенности сил, действующих на ротор. Если рассматриваемые магнитные поля вращаются, то вращается и результирующее усилие 2/рез. вызывающее вибрацию ротора и статора при недостаточной его жесткости или неудовлетворительном креплении к опорной поверхности, а также шум в машине. Увеличению вибрации и шума способствует неравномерность воздушного зазора и ряд механических причин (недостаточная жесткость вала ротора, ослабление крепления его в подшипниках и др.). При изменении частоты вращения ротора 2 в период пуска изменяются частота вращения сил 2/рез и частота вибрации ротора. При некоторых значениях 2 возникает явление резонанса, при котором существенно возрастает вибрация ротора и шум, возникающий в машине. Амплитуда вибрационных моментов не зависит от значения нагрузки. Поэтому при небольшой нагрузке в режиме, близком к холостому ходу, амплитуда вибрационных моментов может превзойти значение основного электромагнитного момента двигателя. Это явление может вызвать неравномерность вращения ротора, особенно заметное при малых частотах вращения, когда периоды изменения вибрационного момента достаточно велики. Вибрационные силы и моменты значительно снижаются при скосе пазов ротора. Реактивные моменты проявляются в асинхронной машине при определенном сочетании чисел зубцов статора zi и ротора Z2. Эти моменты возникают потому, что любое ферромагнитное тело, находящееся в магнитном поле, стремится занять положение, соответствующее наибольшей проводимости магнитной цепи. Наибольшего значения реактивные моменты достигают в случаях, когда zi=Z2 или когда число полюсов первой гармоники зубцового порядка поля статора оказывается равным числу зубцов ротора, т. е. при 2pvzi = 2(zi±p) = Z2. В первом случае зубцы статора и ротора стремятся расположиться друг против друга (рис. 4.11, а), вследствие чего при их взаимном смещении возникает реактивный момент Мр. Под действием момента Мр ротор двигателя с Z2=Z\ при пуске не может тронуться с места. Это явление называют прилипанием , оно обычно оказывает влияние на работу двигателей небольшой мощности, имеющих малый пусковой момент. Во втором случае полюсное деление xvz первой гармоники зубцового порядка статора оказывается равным зубцовому делению 90 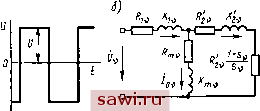 Рис. 4.12. Форма кривой напряжения при питании асинхронной машины от преобразователя частоты (а) и схема ее замещения для токов высших гармоник (б) tz2 ротора и при некоторой частоте вращения ротора П2=Пу, зубцы ротора и полюса статора располагаются друг против друга (рис. 4.11, б). Поэтому при их взаимном смещении возникает реактивный момент Мр, воздействующий на механическую характеристику двигателя при частоте вращения П2=ги так же как и синхронный момент от внешних гармоник поля. Таким образом, все виды рассмотренных выше моментов зависят от соотношения между числами зубцов статора и ротора. Для трехфазных машин к числу неблагоприятных сочетаний этих чисел, при которых появляются значительные доба- о) вочные моменты, вибрация и шум, относятся: zi-Z2=0, 1, 2, 3, 4; zi-Z2=p, p±l; zi = =Z2=2p, 2p±2, 2p±3, 2p±4; zi-Z2=3p. Эффективным средством устранения вредного влияния высших гармоник на работу асинхронной машины является скос пазов статора или ротора. При проектировании асинхронных двигателей используют таблицы рекомендуемых сочетаний чисел пазов статора и ротора с учетом числа полюсов машины, наличия или отсутствия скоса пазов, формы паза и величины воздушного зазора. 4.3. Влияние на механическую характеристику высших гармоник тока при питании обмотки статора несинусоидальным напряжением Магнитные поля, созданные высшими гармониками тока. В схемах частотного регулирования, когда асинхронный двигатель получает питание от статического преобразователя частоты, к обмотке статора подводится напряжение прямоугольной или ступенчатой формы. Анализ особенностей работы двигателя от несинусоидального напряжения обычно проводят, разлагая заданную форму кривой напряжения в гармонический ряд и исследуя отдельно действие каждой гармоники. При прямоугольной форме напряжения (рис. 4.12, а) гармонический ряд не содержит четных гармоник: и = (4/л)6/[51п (i) + (sin 3u)0/3 + (sin 5u)/)/5-f...]. Каждая гармоника напряжения, т. е. соответствующая гармоника тока статора, создает магнитное поле, вращающееся с часто- /j, = 60/, ;=60/iN ;=/Ziv. (4.39) где /v - частота v-й гармоники. Следовательно, магнитные поля, созданные этими гармониками, вращаются гораздо быстрее, чем рассмотренные высшие пространственные гармоники поля, частота вращения которых Пм= = ni/v. Если сдвиг по фазе между первыми гармониками МДС трех фаз 1=120°, то для высших гармоник этот сдвиг av=120v. Однако для третьей гармоники аз = 360°, что равносильно отсутствию сдвига по фазе, т. е. третья и другие гармоники, кратные трем, не создают вращающегося поля (МДС указанных гармоник во всех трех фазах обмотки статора совпадают во времени). Из-за различного сдвига по фазе а для рассматриваемых гармоник тока Таблица 4.1
направления вращения созданных ими магнитных полей различны, так как у них различно чередование максимума токов в фазах. Например, для пятой гармоники 5= 120°-5 = 600°=2-360°-120°, т. е. чередование максимумов тока в фазах является обратным по сравнению с чередованием токов первой гармоники. Следовательно, пятая гармоника магнитного поля вращается в сторону, противоположную направлению вращения основного магнитного поля (поля первой гармоники). Для седьмой гармоники 7=120°-?= =840°=2-360°+120° чередование максимумов тока, а следовательно, и направление вращения поля совпадают с первой гармоникой. В табл. 4.1 приведены данные для магнитных полей высших гармоник, вычисленные до 25-й гармоники включительно. Знаком + показано совпадение направления вращения поля высшей гармоники с первой, знаком - - обратное направление вращения, знаком О - неподвижное поле (для третьей гармоники и гармоник, кратных трем). Асинхронные моменты. Каждая гармоника магнитного поля статора индуцирует в роторе ток, в результате взаимодействия которого с потоком данной гармоники возникает асинхронный момент. Направление момента определяется направлением вращения поля высшей гармоники относительно основного поля: при совпадении направлений этих полей момент - вращающий, при несовпадении-тормозной. Значения указанных асинхронных моментов можно определить по схеме замещения (рис. 4.12, б) и формуле (4.35) по упрощенной методике, предложенной В. С. Хвостовым. Величина скольжения для рассматриваемых гармоник определяется по формуле 5,= (Л, ± 2)/ , = h l ± i(l-5i)]/v/Zi = Iv ± (l-5i)I/v. (4.40) Так как при номинальном режиме работы скольжение для первой гармоники невелико (sihom=0,02 ... 0,05), приближенное значение (при 5l = 0) 5, = (v+ l)/v=l ± 1/v. (4.41) Знак + в (4.41) соответствует отрицательному направлению поля высшей гармоники. Значения Sv> подсчитанные по (4.41), приведены в табл. 4.1. Из табл. 4.1 видно, что вращающим моментам соответствует 5v<l; тормозным Sv>l. Данные таблицы показывают, что в первом приближении скольжение для высших гармоник можно принять равным единице. Индуктивные сопротивления Xiv и Х, обусловленные потоками рассеяния, пропорциональны частоте и берутся кратными номеру гармоники: Xu=\Xi; Х2=\Х2. Активные сопротивления в машинах небольшой мощности не зависят от частоты. Как показала практика, в машинах средней и большой мощности при высоких частотах имеет место интенсивное вытеснение тока, вследствие чего активные сопротивления увеличиваются с ростом частоты и их можно определять по формулам, аналогичным для индуктивных сопротивлений: Ru-vRi; /?2v=v/?2. При расчетах высших гармоник токов намагничивающим контуром схемы замещения можно пренебречь в связи с малостью амплитуд напряжений и повышенной частотой. Поэтому ток в рабочем контуре схемы замещения для машин средней и большой мощности /, = /u = !2=uJ[.ViRR2)4ii + 2f]- (4-42) Для оценки значения асинхронных моментов можно принять электрические потери в роторе АРэлг равными потерям в статоре, т. е. Aэлv2=Aэлv/2=mI2v(/?vI + /?v2)/2, где АРэл - суммарные электрические потери в статоре и роторе. С учетом (4.42) и полученных зависимостей напряжения U=U\I\ и сопротивлений R и от частоты v-й гармоники имеем Установим охранное оборудование. Тел. . Звоните! |