
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 го напряжения [см. (4.1) и (4.5)]. Поэтому даже незначительное уменьшение напряжения сказывается на величине максимального момента, а значительное уменьшение может вызвать остановку двигателя. На рис. 4.14, а, б для примера приведены механические характеристики асинхронного двигателя при номинальном напряжении Ui = Uhok (кривая /) и напряжении Ui = 0,7 Usom (кривая 2). Во втором случае электромагнитный момент уменьшается примерно в 2 раза, и работа двигателя при номинальной нагрузке становится невозможной. В СССР общесоюзным стандартом установлено, что длительное изменение напряжения в электрических сетях, питающих силовое оборудование, не должно отличаться от номинального более чем на -5% и +10%. 4.5. Рабочие характеристики асинхронного даигателя Рабочими характеристиками называют графические зависимости частоты вращения Мг (или скольжения s), момента на валу М2, тока статора /1, коэффициента
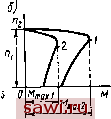 Рис. 4.14. Механические характеристики асинхронного двигателя при различных напряжениях полезного действия т] н cos ф1 от полезной мощности Рг при Ui = = const и /i = const. Их определяют экспериментально или путем расчета по схеме замещения или круговой диаграмме. Примерный вид рабочих характеристик асинхронного двигателя показан на рис. 4.15. Частота вращения п2* = п2/п\, ток статора /i. = /i hom, момент на валу М2. = М2/Мном, потребляемая Pi. = Pi/PiHOM и полезная Р2.= - Рг/Рщок. мощности приведены на графике в относительных единицах. Рабочие характеристики строят только для зоны практически устойчивой работы двигателя, т. е. до скольжения s= (1,1... 1,2) Shom- Частота вращения ротора. При переходе от режима холостого хода к режиму полной нагрузки частота вращения п2 изменяется обычно незначительно, так как при проектировании двигателей с целью уменьшения потерь мощности в роторе ДРэлз стремятся, чтобы скольжение при номинальном режиме не превышало 0,02... 0,06. Следовательно, скоростная характеристика асинхронного двигателя является жесткой . Значения скольжения s и частоты вращения п2 находят на основании схемы замещения (рис. 4.2, в), как указано в § 4.1; можно также построить характеристики П2=/(Р2) и п2=!(М) по приближенным значениям 2, Рг и М, полученным из круговой диаграммы. Для этого задаются рядом точек на окружности токов н находят соответствующие им величины полез- ной мощности, электромагнитного момента и скольжения. При расчетах, не требующих большой точности, полезную мощность Рг принимают равной Рмех (пренебрегая потерями мощности ДРмех), т. е. считая, что она пропорциональна отрезку AF на круговой диаграмме (см. рис. 3.10). Более точно ее определяют построением на круговой диаграмме специальной линии полезной мощности 0 К (на рисунке не показана), которую получают, соединяя точку О 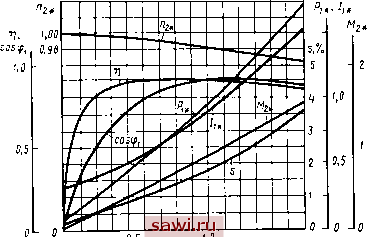 1,5 Р Рис. 4.15. Рабочие характеристики асинхронного двигатели реального холостого хода с точкой К (в режимах, соответствующих точкам О и К, мощность Р2 = 0). В этом случае величина Р2 пропорциональна отрезку, заключенному между окружностью токов и линией 0 К. Электромагнитный момент пропорционален отрезку AF круговой диаграммы. Чтобы определить максимальный момент (см. рис. 3.11), через точку Ам проводят касательную к окружности токов параллельно линии ОТ и из этой точки опускают перпендикуляр на диаметр окружности токов. Максимальный момент пропорционален отрезку Амм. где £м -точка пересечения перпендикуляра с прямой ОТ. Более точно указанные значения мощностей и моментов определяются по круговым диаграммам (см. рис. 3.14... 3.17). Вращающий момент на валу двигателя. Момент М2 связан с полезной мощностью Р2 соотношением лf2=2/ где Q2=2nrt2/60. (4.56) Так как Q2 изменяется мало, зависимость M2=f(P2) близка к линейной. Момент Мг на валу двигателя несколько меньше электромагнитного момента М, значение которого определяют по схеме замещения (рис. 4.1, в) или менее точно по круговой диаграмме; М2=М-М (4.57) где Мт=АРыех/2 - момент, обусловленный трением в двигателе. Ток статора. Ток статора определяют по схемам замещения (см. рис. 4.1, а, г) или менее точно получают по круговым диаграммам (см. рис. 3.14... 3.17) непосредственным измерением отрезков, соединяющих начало координат О с точками Ai, А2, Л3 и т. д. на окружности токов. Активная составляющая тока /] пропорциональна полезной мощности. Реактивная составляющая в диапазоне рабочих нагрузок изменяется мало, так как она определяется главным образом током холостого хода, который составляет 20... 40% от номинального тока. 4.6. КПД и коэффициент мощности асинхронного двигателя КПД электродвигателя определяется выражением Т1=1-ЕДЯ/Л, где Pi - мощность, поступающая в обмотку статора; 2АР - сумма электрических, магнитных, механических и добавочных потерь (см. рис. 3.3). КПД современных асинхронных двигателей при номинальной нагрузке для машин мощностью свыше 100 кВт составляет 0,92... 0,96, мощностью 1 ... 100 кВт - 0,7... 0,9, а микромашин - 0,4... 0,6 (большие значения КПД относятся к машинам большей мощности). Таблица 4.2
Примерное распределение потерь в четырехполюсной асинхронном двигателе мощностью 1... 5 кВт приведено в табл. 4.2. Для большинства электрических машин зависимость т) от полезной мощности Рг имеет такой же характер, как и для трансформатора. При изменении нагрузки электрической машины отдельные виды потерь изменяются по-разному: электрические потери АРэл в обмотках статора и ротора, а также добавочные потери АРд изменяются пропорционально квадрату тока нагрузки: электрические потери в щеточном контакте АРщ.эл (в двигателях с фазным ротором) изменяются пропорционально току в первой степени, механические АРмех и магнитные АРм потери остаются практически постоянными -такими же, как при холостом ходе, если напряжение машины Ui и частота ее вращения Мг не изменяются. По этому признаку все виды потерь можно разделить на две группы: постоянные потери АРпост= =АРм + АРмехИ переменные потери АРпер = АРэл + АР щ.эл + АРд, (2 8
Рис. 4.16. Кривая КПД асинхронного двигателя и зависимость его потерь от тока нагрузки которые можно приближенно считать пропорциональными квадрату тока нагрузки (обычно величина потерь АРщ.эл мала по сравнению с АРэл). Мощность Рг, отдаваемая машиной (Рэл в генераторах и Рмех в двигателях), пропорциональна току нагрузки / в первой степени, поэтому зависимость КПД от тока нагрузки =W = P2KPZ+АЯпост+АЯпер)=А1/(Л1 + В+ CP), (4.58) где А, В, С - постоянные. Из (4.58) следует, что при изменении нагрузки электрической машины КПД ее изменяется, как показано на рис. 4.16. При холостом ходе Т1 = 0, так как полезная мощность Рг отсутствует. При увеличении нагрузки КПД возрастает за счет увеличения Рг, но одновременно быстрее, чем Рг, возрастают переменные потери АРпер, поэтому при некотором токе Lp рост КПД прекращается и в дальнейшем он начинает уменьшаться. Если взять производную d/dl и приравнять ее к нулю, то можно получить условие максимума КПД -он имеет место при такой нагрузке, когда АРпер= = АР пост- При проектировании электрической машины обычно стремятся так распределить потери мощности, чтобы указанное условие выполнялось при наиболее вероятной нагрузке машины, несколько меньшей номинальной. Во вращающихся электрических машинах средней и большой мощности это условие выполняется при нагрузках 60 ...85% от номинальной. При увеличении номинальной мощности относительная величина суммарных потерь уменьшается. Следовательно, должен возрастать и КПД машины. Эта закономерность проявляется во всех видах вращающихся электрических машин и в трансформаторах --машины большей номинальной мощности всегда имеют соответственно и больший КПД и, наоборот, КПД машины малой мощности и микромашин обычно невелик. При расчете КПД асинхронных двигателей электрические потери в обмотках статора арэл1 и ротора арэл2 определяются по формулам: (4.59) Магнитные потери в стали при холостом ходе асинхронных двигателей мощностью до 100 кВт и полузакрытыми пазами статора, сердечники которых собраны из изолированных листов электротехнической стали [1], (4.60) где AP ai=l,6/?i,o/5o>SaiAfaiV(/i/50p- потсри в стали спинки статора, Вт; LP и 21 = 1 >8/?1,о/5о5г1УИг1 у (/i/50)3 - потери в стали зубцов статора, Вт; pi,o/5o - удельные потери в стали согласно ГОСТу для соответствующих марок электротехнических сталей, Вт/кг; Ма\, Mzi- расчетная масса спинки и зубцов статора соответственно; Ва\ и Вг\ - индукции В ЭТИХ частях машины; кь - коэффициент воздушного зазора; t\ - зубцовое деление. Формула (4.60) учитывает как основные, так и добавочные потери в стали при холостом ходе двигателя. Для асинхронных двигателей мощностью свыше 100 кВт с полуоткрытыми или открытыми пазами статора методикой завода Электросила рекомендуется магнитные потери (Вт) в стали определять по формуле АР = С /71,о/5о (Maifii -f Af,i5.i) K(/i/50)3, (4.61) где См - коэффициент, зависящий от формы пазов статора и ротора, который принимают равным 2 при полуоткрытом пазе статора и полузакрытом пазе короткозамкнутого и фазного ротора; 2,7... 3,0 - при открытом пазе статора и короткозамкнутом роторе с 0,8zi<:z2<l,25zi. Механические потери (Вт) асинхронных двигателей со степенью защиты IP44 и способом охлаждения IC01 при внешнем диаметре статора Doi<0,5 м Дмех = С,(П1/1000)2о:,.103, (4.62) где Ml-частота вращения поля, об/мин; Dai -диаметр статора внешний, м; Ст=1,3(1-Doi) при 2р = 2 и Ст=1 при 2р>2. При Dai>0,5 м механические потери можно определить по методике завода Электросила др =с;о,.1оз. (4.63) где Ст=36,5; 15,0; 7,0; 3,5; 2,0; 2,0 при числе полюсов машины 2; 4; 6; 8; 10; 12 соответственно. Механические потери (Вт) двигателей со степенью защиты 1Р23(22) и способом охлаждения IC01 при радиальной вентиляции без радиальных каналов с вентиляционными лопатками на торцах ротора рекомендуется определять по формуле Д Р = с; ( 2/1000)2 D-1 103, (4.64) где D,i - внутренний диаметр статора, м. Для 2р=2, С т=6 при Dii>0,25 м и С/=5 при Dn0,25 м; для 2р>2 С т.=7 при Оц> >0,25 м и С т=6 при D,i<:0,25 м. 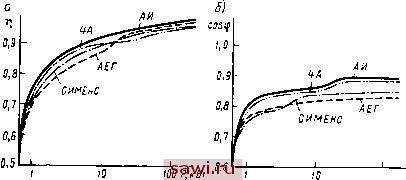 то р, кВт Рис. 4.17. Зависимости КПД и cos ф от мощности двигателей Условные добавочные потери асинхронных двигателей АРд в соответствии с ГОСТ 11828-75 принимаются равными 0,5% потребляемой мощности Pi. Для снижения потерь энергии в двигателях применяют следующие меры: оптимальное проектирование и повышение качества изготовления двигателей; рациональный выбор системы электропривода; улучшение условий эксплуатации. При проектировании асинхронных двигателей стремятся всемерно улучшать их энергетические показатели, в ряде случаев за счет увеличения расхода активных материалов. Проектирование электродвигателей в СССР ведется по минимуму суммарных затрат в народном хозяйстве: на их производство (стоимость материалов и рабочей силы) и эксплуатацию (стоимость электроэнергии при эксплуатации двигателей). При этом принимают, что средняя Установим охранное оборудование. Тел. . Звоните! | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||