
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 нагрузка составляет 0,6 Рном. Поэтому при проектировании современных электродвигателей максимальное значение КПД достигается при Р=0,6 Рном, а в диапазоне нагрузок 0,6... 1,0 от номинальной КПД остается приблизительно одинаковым. На рис. 4.17, а, б приведены зависимости КПД и созф! для современных четы-рехполюсных двигателей от номинальной мощности. В частности, КПД и со5ф1 двигателей серии АИ на 1... 1,5% больше, чем у серии 4А. В новой унифицированной серии высоковольтных асинхронных двигателей мощностью от 200 до 1 ООО кВт, разработанных Интерэлектро, КПД также увеличен на 1...2% по сравнению со старыми сериями. Для снижения потерь в новых унифицированных сериях электродвигателей (АИ и др.) применены ряд конструктивно-технологических мероприятий. К их числу относятся: 1. Применение холоднокатаной электротехнической стали 2212 вместо стали 2013, так как последняя требует высокотемпературной термообработки отштампованных листов магнитопровода в нейтральной среде, причем нарушение режима термообработки вызывает резкое увеличение потерь в стали, что снижает КПД на 2...3%. Сталь 2212 имеет электроизоляционное покрытие и при ее использовании отпадает необходимость термообработки и обеспечивается более стабильное качество магнитопроводов. 2. Применение для статоров одно-двухслойной обмотки и двухслойной обмотки с укладкой лобовых частей в развалку . Эти виды обмоток позволяют осуществлять их механизированную укладку и обеспечивают уменьшение длины лобовых частей примерно на 20%, что приводит к снижению расхода обмоточной меди на 10%. Так как электрические потери в лобовых частях обмотки электродвигателя могут достигать от 25 до 50% потерь во всей обмотке (в зависимости от числа полюсов), то эти меры обеспечивают увеличение КПД приблизительно на 1,5%. 3. Повышение точности механической обработки всех узлов и деталей машины и шихтовки листов магнитопровода статора, что позволило получить более равномерный воздушный зазор и применить легкие шарикоподшипники с улучшенными виброакустическими характеристиками. Эти меры, а также усовершенствование вентиляционного узла обеспечило уменьшение механических потерь. 4. Усовершенствование технологии заливки ротора, позволяющее осуществить высокую монолитность беличьей клетки и корот-козамыкающих колец, обеспечило снижение потерь в обмотке ротора. 5. Выбор рациональных соотношений числа зубцов статора и ротора для двигателей с различным числом полюсов, большая равномерность воздушного зазора и другие указанные выше меры в части рационального выбора схемы обмотки статора и усовершенствования технологии изготовления машины обеспечили снижение добавочных потерь. Коэффициент мощности. Коэффициент мощности двигателя определяют по схеме замещения (рис. 4.2, г). При этом ток статора Л = /оа + / = /оа + Л + /р ИЛИ Д = К(/а +/оа) +/р. где /а и /р- активная и реактивная составляющие тока /, соответственно равные = иI cos оIZ; /p=iSinoVZ, где со5ф= (Р1--Рэкв)/2; sin ф = (Л1 + Аэкв)/2 -функции угла сдвига фаз ф между векторами Out, Z - определяется по (4.8). Следовательно, /а=(iRsJZ) (I+/?i ?3K ); (4.65) /р = (1/?экв/2)[(1+,кв) ?экв]. (4.66) Подставив в (4.65) и (4.66) значение Z7?3kb=/?27s-I-2Pi-l-+R2 s, где Рг и Рг взяты из (4.10), получим: /а = - t/l(l-/?w/?3KB) R/s + 2Ri -f Rls J Ux [(A-i + Аз,в)/зкв] . P RJs + 2Ri + Rls (4.67) (4.68) (4.69) В исходной схеме замещения (рис. 4.2, а) не точно учитываются потери в обмотке статора: по схеме А.Рза\ = гп\1Щъ а фактически AP3ai=mi/2iPi. Допущенная погрешность равна miPi(/i-Я) = = 2/oa(/a-l-/oa)miPi. Ее следует учитывать при определении потребляемой мощности Pi и со5ф1 следующим образом: Pi = m,U, (/з + /оа) (1 + 2/?, ?т); (4-70) cos <?! = 1(/а + /oa) l 1(1 + RlIRm)- (4.7 1) Из рис. 4.2, а видно, что намагничивающий ток при нагрузке и ток /г ротора, приведенный к первичной цепи, соответственно равны: /=Е,/Х ; (4.72) /2= + (/р-/.Я. (4.73) где El - ЭДС первичной цепи при нагрузке, равная При холостом ходе эта ЭДС Xi + X (4.75) 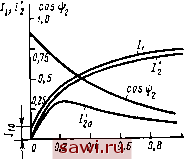 1,11 s Рис. 4.18. Зависимости токов в обмотках статора и ротора и cos фа от скольжения При определении пускового тока можно пренебречь составляющей hi. т. е. Приближенно токи /j и /г и созф! можно определить по круговой диаграмме. При переходе от режима холостого хода к режиму номинальной нагрузки коэффициент мощности возрастает от значения со5ф1 = = 0,08... 0,15 до некоторой максимальной величины: для двигателей малой и средней мощности (1... 100 кВт) со5ф1 = 0.7... 0,9, а для двигателей большой мощности (свыше 100 кВт) со5ф1 = = 0,90... 0,95. При дальнейшем росте нагрузки созф! несколько уменьшается. Объясняется это тем, что при возрастании механической нагрузки на валу, т. е. увеличении скольжения s, активная составляющая тока /га уменьшается (рис. 4.18) из-за уменьшения COS}2 = ?2 так как при этом увеличиваются час- тота тока в роторе f2=fiS и его индуктивное сопротивление Xzs. Максимальному значению созф! соответствует точка на круговой диаграмме, при которой вектор тока /j располагается по касательной к окружности токов. Работа асинхронного двигателя при малых нагрузках, когда со5ф1 мал, в энергетическом отношении невыгодна. Ввиду массового использования асинхронных двигателей для рационального электроснабжения предприятий следует избегать длительной работы двигателей при холостом ходе н так строить технологический процесс на предприятии, чтобы асинхронные двигатели были загружены в соответствии с их номинальной мощностью. В тех случаях, когда двигатель работает с изменяющейся нагрузкой, целесообразно для повышения коэффициента мощности при степени нагрузки до 50% от номинальной уменьшать напряжение, подаваемое на фазы обмотки статора (например, путем переключения этой обмотки с А на Y или с помощью автотрансформатора). В этом случае уменьшается магнитный поток машины, а следовательно, и реактивная мощность. В двигателях с фазным ротором кривые соЗф! и КПД располагаются несколько ниже, чем у соответствующих двигателей с короткозамкнутым ротором. Это объясняется следующими причинами: возникновением дополнительных потерь мощности в результате наличия щеток на контактных кольцах; уменьшением полезной мощности из-за худшего использования объема ротора (обмотку ротора выполняют из изолированного провода, вследствие чего пазы ротора частично заполняются изоляцией) ; увеличением намагничивающего тока из-за возрастания магнитного сопротивления зубцово-пазового слоя ротора в результате уменьшения сечения зубцов. 4.7. Работа асинхронного двигателя при неноминальных условиях При питании асинхронного двигателя от автономного источника электроэнергии небольшой мощности (транспортные установки, передвижные электростанции) частота и напряжение сети, к которой подключают двигатель, могут отличаться от номинальных. Изменение частоты. Рассмотрим влияние изменения частоты на работу двигателя при условиях: напряжение L/i = /ном = const и нагрузочный момент Mh=Mhom = const. Если принять f/i £i, то, согласно (3.1), получим, что O = U,K4AAAw,k 0- (4-77) Из (3.17) имеем А=/(СжФт созфг)- (4.78) Следовательно, изменение частоты fi приводит к изменению потока Фт и соответствующее ему изменение тока ротора /г и нагрузочной составляющей h тока статора. При уменьшении частоты fi происходит увеличение магнитного потока и намагничивающего тока, а следовательно, и тока холостого хода /о, который из-за насыщения стали магнитопровода возрастает быстрее, чем магнитный поток. Обычно уменьшение частоты fi на 10% вызывает увеличение тока Iq на 20... 30%. Так как ток Iq является практически реактивным, то это приводит к снижению коэффициента мощности двигателя. При увеличении частоты fj происходит пропорциональное возрастание частоты вращения Мг. Если нагрузка двигателя имеет вентиляторную характеристику, то нагрузочный момент возрастает пропорционально квадрату или кубу частоты вращения, т. е. частоты fi. Кроме того, магнитный поток Фт уменьшается обратно пропорционально изменению частоты. Все это, согласно (4.78), приводит к резкому увеличению тока /2. При возрастании частоты на 10% ток ротора двигателя, вращающего вентилятор, увеличится примерно в 1,5 раза, что может привести к перегреву двигателя. При неизменном нагрузочном моменте увеличение частоты повышает опасность нарушения устойчивости двигателя, так как максимальный момент двигателя снижается пропорционально /i. Таким образом, отклонение частоты fi от номинального значения приводит к ухудшению условий работы двигателей в режимах, близких к номинальной нагрузке, и поэтому частота не должна отличаться (согласно ГОСТу) от номинальной более чем на 2,5%. Изменение напряжения. Обычно асинхронные двигатели рассчитывают так, чтобы при номинальном режиме КПД и созф! у них были близки к максималь- а) V 0,8 0,7 0,8 0,8 а cos If 0,3 0,8 0,7 0,6 0,5.
8 иа Щ/нам 0,5 0,8 1,0 U/UgM Рис. 4.19. Зависимость ti (а) и cos ф1 (б) от питающего напряжения при номинальной и уменьшенной нагрузках ным. С другой стороны, максимум КПД имеет место, когда постоянные потери (механические и в стали) равны переменным потерям в обмотках (см. § 4.6). Поэтому влияние изменения напряжения является неоднозначным и зависит от нагрузки на валу двигателя. При увеличении напряжения происходит возрастание магнитного потока и, следовательно, увеличение тока холостого хода и магнитных потерь в стали. Вследствие этого КПД и cos ф1 двигателя уменьшаются. Уменьшение напряжения опасно тем, что пропорционально квадрату напряжения изменяется максимальный вращающий момент двигателя и при большом моменте нагрузки может произойти нарушение устойчивости двигателя. Поэтому колебания напряжения сети также должны быть ограничены (согласно ГОСТу - от -5 до +10%). При одновременном отклонении частоты и напряжения асинхронный двигатель должен отдавать номинальную мощность, если сумма процентных отклонений этих параметров не превосходит 10% (без учета их знаков). На рис. 4.19, а, б показаны кривые зависимости т] и соЗф! от напряжения сети при двух значениях мощности двигателя Рном и 0,6 Рном для двигателя мощностью 2,2 кВт при 1500 об/мин. Из этих кривых следует, что при допустимых ГОСТом отклонениях напряжения от номинального КПД при номинальной нагрузке уменьшается на 2%, а при Р = 0,6Рном и Ui = \,l (/ном -на 8%. При этом наихудший и довольно часто встречающийся случай - работа недогруженного двигателя при 1,1 Uhom дает максимальное уменьшение созф1 - на 24%. При частичной нагрузке, когда нет угрозы нарушения устойчивости, уменьшение напряжения позволяет увеличить КПД и созф!, так как пропорционально напряжению уменьшаются поток Фт, ток ПО холостого хода и магнитные потери. Из рассмотрения рис. 4.19 следует, что каждой нагрузке соответствует свое оптимальное значение напряжения, при котором постоянные потери равны переменным. Чем меньше нагрузка, тем меньше это оптимальное напряжение. Точно так же для каждой нагрузки существует напряжение, при котором созф1 имеет максимум. На рис. 4.20 показаны круговые диаграммы двигателя при номинальных напряжении и нагрузке (а) и при пониженном напряжении и частичной нагрузке (б). При понижении напряжения уменьшаются ток холостого хода и диаметр окружности токов. В обоих случаях значение cos ф1 близко к максимальному, так как вектор тока 1\ расположен по касательной к окружности токов. 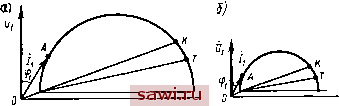 Рис. 4.20. Круговые диаграммы асинхронного двигателя прн номинальном (а) и пониженном (б) напряжении Таким образом, желательно при частичных нагрузках снижать напряжение питания, для того чтобы КПД и со8ф1 поддерживались на высоком уровне. В эксплуатации асинхронные двигатели могут быть сильно недогруженными, что вызывает существенное уменьшение их КПД и со5ф1. В частности, это относится к электроприводам сверлильных станков, швейных машин, пишущих машин и др., которые значительную часть времени работают вхолостую или при малой нагрузке. Расчеты и испытания показали, что ток холостого хода в двигателях мощностью порядка 2...3 кВт может составлять 50...60% номинального тока, а угол ф1 = 80° вместо 30° при номинальной нагрузке. Регулирование напряжения. Регулировать напряжение при работе двигателя с нагрузкой, меньшей номинальной, можно по различным законам, которые исследованы в работах Е. В. Радиной. Для этого рассмотрим зависимости т] и созф1 от напряжения питающей сети при различных нагрузках. Согласно схеме замещения (рис. 3.6, б). cos <fi-- fo cos <fo + fcos <f2 Уи + ip VUq cos <po 12 cos <(,2)2 + (/о sin vo + /2 sin f2f (4.79) 111 Установим охранное оборудование. Тел. . Звоните! | |||||||||||||||||||||||||||||||||||||||||||||||