
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 Выражая значение тока 1 согласно схеме замещения асинхронного двигателя, пренебрегая активными потерями при холостом ходе (51пфо=1) и принимая относительные значения моментов Af и Afmax., согласно (4.22), и (4.23), получим: COS(?i = 2ном Y[/0Ho * + 2 oH!/(2Afmax.* )] + (2hom*/*u) (4.80) где /оном и /гном - значения токов /о и /г при номинальном режиме; u = Li/f/iH0M -коэффициент регулирования напряжения. При работе двигателя с уменьшенной нагрузкой и пониженном напряжении магнитные потери уменьшаются пропорционально квадрату напряжения, электрические потери - пропорционально квадрату тока статора, снижается намагничивающий ток, а частота вращения заметно не уменьшается. Поэтому 1 1 -f ХдЯ/Рг 1 [ I - Дяпм .ном и ShoM* S oM (4.81) Для определения максимального КПД при изменении нагрузки необходимо приравнять нулю первую производную т), согласно (4.81), по коэффициенту регулирования напряжения ku- При этом после преобразования получаем (4.82) м.ном Для определения максимального значения соЗф! при изменении нагрузки следует приравнять нулю производную соЗф!, согласно (4.80), по ku и получим (4.83) к = УМ У/2ном/(2/о омтах*)- Для получения постоянного значения cos ф1 = со5 ф1ном необходимо приравнять (4.80) соответствующему выражению при со8ф1ном. Проведя ряд преобразований, получим k=V~Ml. (4.84) Эта зависимость относится ко всем асинхронным двигателям независимо от их параметров. Для получения минимального тока статора при изменении нагрузки следует приравнять нулю первую производную знаменателя (4.80) по ku- При этом имеем 0Hi\i max На рис. 4.21 показаны зависимости ku от Л1., построенные по формулам (4.82) ... (4.85) для двигателя с номинальными данными  0,25 0,5 0,75 Рис. 4.21. Зависимость коэффициента регулирования напряжения от нагрузки при различных законах регулирования: / - прн максимальном КПД; 2 - при минимальном токе статора; 3 - при значении cos ф1-соз Фн(, ; i - прн максимальном cos ф 72, СО 0,8 0,6 0,2 0,1* В,В 0,8 1,0 Рис. 4.22. Зависимость г\ и cos ф1 от нагрузки при различных законах регулирования: /- -со8ф,; -п; 2, 2- прн максимальном КПД; 3, 3- при соаф]--COS Ф о ; 4, 4 - при отсутствии регу-лировання 2,2 кВт, 1500 об/мин, 380 В, а на рис. 4.22 - зависимости т] и С08ф1 от нагрузки при различных законах регулирования. На рис. 4.23, а, б приведены экспериментальные зависимости т] и со8ф1 от коэффициента регулирования напряжения для того же электродвигателя при различных значениях нагрузочного момента М.. Из рассмотрения этих зависимостей вытекает, что наиболее целесообразно регулировать напряжение по законам, обеспечивающим максимальное значение т] или при со5ф1 = со8ф1ном. При рсгулировании напряжения по максимальному значению С08ф1 КПД оказывается значительно ниже, чем при других законах регулирования. Однако в некоторых случаях, например в автономных системах электроснабжения, такой закон регулирования может оказаться выгодным. Из рис. 4.22 видно, что при регулировании напряжения по условию со8ф1 = = со8ф1 ом при нагрузке 0,6Рном со8ф1 возрастает на 15% и т] - на 3%, а при 0,4Рном со8ф1 возрастает на 27% и т] - на 6% по сравнению с работой двигателя при номинальном напряжении при той же нагрузке. Таким образом, регулирование напряжения при изменении нагрузки обеспечивает существенное повышение энергетических показателей асинхронных двигателей и, следовательно, значительную экономию электрической энергии. 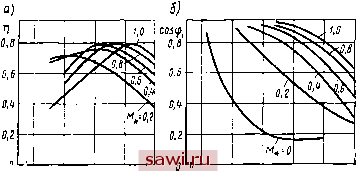 0,> 0,6 0,8 1,0 0,2 0,4 0,5 0,8 1,0 Рис. 4.23. Зависимость т] (а) и cos ф1 (б) от коэффициента регулирования напряжения при различных нагрузках Проще всего осуществить уменьшение напряжения при снижении нагрузки путем переключения обмотки статора со схемы А на схему Y. При таком переключении фазные напряжения уменьшаются в КЗ раз, что приводит к уменьшению потока в К Зраз, а тока холостого хода - в 2,5... 3 раза; уменьшаются пропорционально также и магнитные потери. Токи /г и /г в этом случае увеличатся в V3 раз (при AfH=const), но при уменьшенной нагрузке двигателя /г и /j могут не превышать номинальных значений. На рис. 4.24 показаны кривые относительных значений 1и т], соЗф! для двигателя мощностью 28 кВт при таком переключении. Степень загрузки двигателя (Рг/Рном), при которой целесообразно переключать его обмотку статора с А на Y, определяется путем расчета или экспериментально. Недостатком такого метода является ступенчатое изменение напряжения. При уменьшении напряжения для любой нагрузки должно соблюдаться условие (4.86) При изменении напряжения момент Afmax изменяется пропорционально ku. Следовательно, Afmax/AJ = iW fe/(iW Mj = M 3,/fc2/M> 1. (4.87) Так, например, при регулировании по закону cos ф1 = cos фшом для проверки выполнения условия (4.86) надо в (4.87) подставить значение ku из (4.84). При этом получаем Л.ах.>1- (4.88) Так как для любого асинхронного двигателя Afmax.>l, то при указанном законе регулирования автоматически обеспечивается сохранение устойчивой работы. При регулировании по другим законам следует проверить возможность нарушения устойчивости двигателя по критерию (4.87).  о.г ал 5,5 .г ал .5 р/р о.г а.о.в /р Рис. 4.24. Рабочие характеристики асинхронного двигателя при включении обмотки статора по схемам и Y и а При уменьшении напряжения путем переключения обмотки статора с А на Y момент Afmax уменьшается в 3 раза. Следовательно, для обеспечения той же перегрузочной способности Мтах/Л1ном нагрузка двигателя должна быть не более 30% от номинальной. Значительную экономию электроэнергии может дать управление частотой вращения электродвигателей, особенно в электроприводах вентиляторов, насосов, компрессоров и др., где используется около 60% всех электродвигателей. Экономия электроэнергии при регулировании частоты вращения таких механизмов может достигать более 50%- При применении частотного регулирования можно выбрать оптимальную номинальную частоту вращения электродвигателя и тем самым улучшить его технико-экономические показатели. Питание трехфазного двигателя несимметричным и несинусоидальным напряжением. В рассматриваемом случае систему несимметричных напряжений можно разложить на симметричные составляющие прямой, обратной и нулевой последовательности и проанализировать влияние каждой из них на работу двигателя. На рис. 4.25 показаны схемы замещения асинхронного двигателя для токов прямой и обратной последовательности. Они отличаются друг от друга величиной активного сопротивления ротора Rls, так как 5обр= (2-Snp). Кроме того, значения Рапр и Хгпр отличаются от Ргобр и Агобр, так как частота /2обр== (2-Snp)fi токов ротора /гобр обратной последовательности во много раз больше частоты /гпр- =Snp/i токов /гпр прямой последовательности. Поэтому влияние вытеснения тока в проводниках обмотки ротора на ее активное и индуктивное сопротивление сказывается для токов прямой и обратной последовательности различным образом. Составляющие потока и тока ротора прямой и обратной последовательности создают встречно направленные электромагнитные моменты Afnp и Afo6p, действующие на ротор двигателя: 1ж 12о6р2обр 1?о6р2обр(2 - Snp) обр=-Г-=-;-Гг-, 2Лбр l [/?2o6p + (2-S p)2;f2o6p] При несимметрии питающего напряжения обычно U]np>Uio6p-Однако отношение токов hoeplhnp, а следовательно, /io6p iiip значительно больше отношений напряжений /юбр/шр, так как из-за (4.89) (4.90) 5) X, 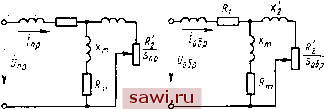 Рис. 4.25. Схе.ма замещения асинхронного двигателя для токов прямой (а) и обратной (б) последовательности различия частот токов в обмотке ротора ЭДС и ток прямой последовательности значительно меньше, чем ЭДС и ток обратной последовательности. В связи с этим сравнительно небольшая несимметрия напряжений в сетях, питающих асинхронные двигатели, может привести к возникновению значительного момента Afo6p. который при работе машины в двигательном режиме является тормозным. Следовательно, чтобы двигатель развивал такой же электромагнитный момент М, что и при симметрии питающего напряжения, его момент Afрез = Afпр-Afобр должен быть увеличен на величину момента Мобр, что приводит к возрастанию скольжения s p примерно в Л1пр/(Л1пр-Afo6p) раз. На рис. 4.26 показана зависимость моментов асинхронного двигателя от скольжения при отношении {/1обр/1пр=0,5. Из нее следует, что под влиянием токов обратной последовательности результирующий момент двигателя Л1рез снижается и скольжение при том же нагрузочном моменте Мн на валу возрастает. Из-за этого, а также под действием тока /гобр увеличиваются потери энергии в обмотке ротора и нагрев машины, уменьшается ее КПД. ГОСТ допускает несимметрию напряжения в электрических сетях (отношение напряжения обратной последовательности к номинальному напряжению) до 2%, на зажимах асинхронных двигателей несимметрия может превышать 2% (при условии допустимого нагрева двигателей), снижение их КПД не учитывается. Проведен- ные исследования показали, что при несимметрии 2% потери увеличиваются на 8% и КПД двигателя снижается примерно на 1%. Несимметрия же на 3,5% увеличивает потери на 25%. т. е. снижает КПД примерно на 3%. На рис. 4.27 показаны зависимости КПД ог асимметрии напряжения для одного из двигателей общего применения мощностью 5,5 кВт. При несимметрии напряжения 2% КПД снижается примерно на 2%, а при 47о-почти на 5,5%. Следовательно, несимметрия питающего напряжения крайне нежелательна.  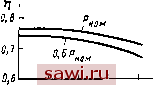 Рис. 4.26. Зависимости моментов асинхронного двигателя при несимметрии питающего напряжения от скольжения I 2 3 и Несимметрия % Рис. 4.27. Зависимость КПД от несимметрии питающего напряжения при различных нагрузках Искажение формы кривой питающего напряжения также приводит к уменьшению КПД асинхронных двигателей. ГОСТ допускает несинусоидальность формы кривой напряжения в электрических сетях, при которой действующее значение всех высших гармоник не превышает 5% действующего значения напряжения основной частоты. На зажимах асинхронных двигателей несинусоидальность может превышать 5% при условии допустимого нагрева двигателей. Как показали проведенные исследования, несинусоидальность 5% снижает КПД двигателя на 0,25%. Таким образом, в худшем случае, допускаемом ГОСТом на качество электроэнергии (отклонение напряжения до 1,1 L/hom при нагрузке 0,6 Рном, несимметрия 2% и несинусоидальность 5%), КПД асинхронных двигателей снижается более чем на 5%- При этом суммарные потери электроэнергии в асинхронных двигателях составляют примерно 2,57о от всей электроэнергии, вырабатываемой в СССР. Обрыв фазы обмотки статора. При пуске трехфазного асинхронного двигателя с оборванной фазой создаются такие же условия, как и в однофазном двигателе, т. е. его результирующий момент Лрез=Л1пр-Afo6p = 0. Ротор двигателя находится в неподвижном состоянии и не может разогнаться. Пусковой ток в оставшихся в работе фазах будет приблизительно в 5 раз больше номинального. Это приведет к выходу из строя машины, если защита не отключит ее быстро от сети. Установим охранное оборудование. Тел. . Звоните! |