
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 время разгона электродвигателя определяется главным образом электромеханическими процессами, так как электромагнитные переходные процессы, происходящие в двигателе, протекают значительно быстрее, чем электромеханические. Обычно о быстродействии двигателя судят по значению его электромеханической постоянной времени 7 м, которая примерно на порядок выше электромагнитной постоянной времени Тзм = Е/Я, обусловленной индуктивностью двигателя. Значение 7м определяется из условий разгона двигателя при статическом моменте на валу Мст - О. При этом уравнение (5.14) принимает вид (5.16) Выражая динамический момент в относительных единицах (в долях от номинального момента двигателя) и учитывая, что 2= = fii(I-s), dQ2/ds--Qi, получим ДИН* Ллии ds di ds dt (5.17) где 7 m -электромеханическая постоянная времени, определяющая динамические свойства двигателя. (5.18) Для определения уравнения движения ротора в общем случае выразим из (5.14) динамический момент где М.=Л1/Л1но 1, Л1ст.=Мст/Мном - значения указанных моментов в относительных единицах. Тогда dt = (5.19) Значения Л1. и Л1ст. определяются из механической характеристики двигателя и характеристики производственного механизма. Для многих электроприводов статический момент изменяется по закону McT = Mn/(a-bs), где а и b - постоянные. При s=l Л1ст = =MnJ(a-Ь)=Ми/кр, где - коэффициент резерва, необходимый для обеспечения разгона двигателя в начале пуска. Длительность пуска можно определить из (5.19) in=Tj dsl{M-M )=UU, (5.20) где/ 1 = 7 1 rfs/(Af* -Af *) -длительность пуска в зоне измене-ния S ОТ 1 ДО Skp; tni-Tu dsl{M - М )- длительность пуска в зоне изменения s от кр до ном. Учтя 7м и переходя к интегрированию по dfi2. получим / = [ JdQ2l{M-M ). (5.21) Время разгона пропорционально заштрихованной площади (рис. 5.14) на графике кривой (Л1-Л1ст). Это время обычно невелико и не превышает нескольких секунд. Однако в двигателях с короткозамкнутым ротором при недостаточно большом электромагнитном моменте (т. е. разности Л1-Л1ст) и значительном моменте инерции процесс пуска может сильно затянуться и температура обмоток ротора и статора из-за больших пусковых токов может превысить допустимые пределы. Рассмотрим уравнение движения ротора при пуске электродвигателя без нагрузки (Л1ст = 0), предположив, что механическая характеристика двигателя оп- g Графическое определение времс-ределяется выражением пуска двигателя с короткозамкнутым (4.20). В этом случае (5.19) ротором принимает вид 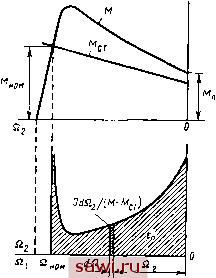 ds = 2*м Ukp 5 / (5.22) Решение данного дифференциального уравнения получим, проинтегрировав (5.22) в пределах от s=l до некоторого конечного значения кон: = IKp 1 n ( 1/Skoh) + (1 - 5L)/(2s,p)I. (5.23) Ha рис. 5.15, a приведены зависимости относительной частоты вращения Q2/Qi=(I-s) от времени /7 м, построенные по (5.23). Если считать, что разгон совершается до Skoh=0, то длительность пуска (i/Tu)s=o= оо. Принимая, что пуск практически заканчивается, когда Skoh отличается не более чем на 5% от установившегося значения, получим 1=о-Г- 1 Р (1/0,05)+ (1 -0,052)/(2s,p)]=j-[l,5s,p+ l/(4s,p)I. (5.24) Следовательно, относительная длительность пуска определяется величиной 5кр, которая пропорциональна сопротивлению цепи ротора, и кратностью максимального момента k. Минимальное значение относительной длительности пуска при заданном значении kyi можно получить из условия ci{t/Ttt)/cis=Q. При этом 5 р= Минимальное время пуска со- ответствует наибольшей пло- Г ;= 1 п !?двигателя (а) щади, ограниченной кривой и зависимости M=f(s) при различных ал значениях f6) Al=/(s)-в данном случае кривой 2 на рис. 5.15, б. Потери энергии при пуске. 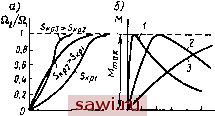 Эти потери можно определить из следующей формулы: Ди= (ДЯ 2/ + дР,,0. (5.25) где AW=AW2+ AWi -потери энергии в роторе и статоре. Потери энергии в роторе за время dt Заменяя АЯ 2/ = Я, 5/= 2,5 (M, + Л1 ) dt. Aиtf=,./ sdt=-QlJsds; (5.26) lSM dt=QlM M sl dQ2=-2,rfs; dt=-TdsiXM-M ), получим ДЯ 2/=д?У5[ 1 +M M*-M .)] ds. (5.27) За весь период пуска от s = 1 до Shom потери энергии в роторе (1-5U + 2J \ Af. - Afcr. / (5.28) Первый член выражения (5.28) определяет потери энергии, обусловленные действием приложенного к валу двигателя динамического момента, а второй -статического. Для вычисления последнего члена необходимо знать характер изменения моментов Af. и AfcT., т. е. механические характеристики двигателя и приводимого им производственного механизма. Потери энергии в обмотке статора при пуске AW,=I miflRidt = l {fJl2)4Ri!R2) mj2R2dt. Принимая приближенно, что за период пуска сопротивления Ri и R2 не изменяются, а отношение /i 2 1/0,9, получим ди1= 1,112(ад2) j m.fiRidi =1,1 IHRi/Ri) ДИг ~ 1.24AU2 (5.29) В глубокопазных двигателях при определении сопротивления обмотки ротора R2 необходимо учитывать вытеснение тока в стержнях. Вопросы дпя самоконтроля 1. Какой основной недостаток способа прямого пуска асинхронного двигателя? 2. Для чего применяют пуск двигателя с короткозамкнутым ротором при пониженном напряженки и изменяется ли при этом пусковой момент? 3. Какими способами понижают напряженке при пуске? 4. Для чего при пуске двигателя с фазным ротором в цепь обмотки ротора включают реостат? 5. Как устроен двигатель с двойной беличьей клеткой и как он работает в начальный момент пуска и после его окончания? 6. Как устроен и работает глубокопазный двигатель?  Регулирование частоты вращения асинхронных двигателей и работа их в тормозных режимах Существует два принципиально возможных метода регулирования частоты вращения асинхронных двигателей: изменением частоты вращения rii магнитного поля или величины скольжения s. Изменение частоты вращения поля tii, согласно (1.1), осуществляют двумя способами: изменением частоты fi тока, подаваемого на обмотку статора, или изменением числа полюсов машины 2р. Изменение скольжения 5 при заданном нагрузочном моменте М=Ми, согласно (4.1), можно осуществить путем изменения питающего напряжения Uu введения в цепь ротора добавочного активного сопротивления (в двигателях с фазным ротором) или подключения обмотки ротора к добавочному источнику электрической энергии с изменяющейся частотой fj (в двигателях двойного питания и в асинхронных каскадах). При изменении питающего напряжения и введении в цепь ротора добавочного активного сопротивления мощность скольжения зРэм целиком выделяется в цепи ротора в виде теплоты. При подключении обмотки ротора к добавочному источнику электрической энергии мощность скольжения sPsM в основном поступает от этого источника и в цепи ротора теряется только мощность milRi- Для изменения направления вращения ротора необходимо изменить направление вращения магнитого поля. В трехфазных машинах это осуществляют изменением чередования фаз, для чего переключают два провода, подводящие ток из сети к двум любым фазам обмотки статора. 6.1. Частотное регулирование Этот способ регулирования частоты вращения позволяет применять наиболее надежные и дешевые асинхронные двигатели с короткозамкнутым ротором. Однако для изменения частоты питаю- щего напряжения требуется наличие источника электрического тока переменной частоты. В качестве последнего используют либо синхронные генераторы с переменной частотой вращения, либо преобразователи частоты: электромашинные или статические, выполненные на управляемых полупроводниковых вентилях (тиристорах и транзисторах). Законы регулирования. Зависимость максимального момента от напряжения и частоты выражается формулой (4.5). Подставляя в нее значение fii = 2nfi 3 при Ci = 0, получим (6.1) или, пренебрегая значением R\ в знаменателе и выражая Х\ = = 2nf\Li, X2 = 2nf\L2, получим 4nA{X,+X2f = + mxU\p (6.2) где с - постоянная; L\ и L2 - индуктивности рассеяния обмоток статора и ротора. Из (6.2) следует, что при изменении частоты \\ одновременно с частотой вращения изменяется и максимальный момент, т. е. перегрузочная способность двигателя (отношение максимального момента Мщлх к номинальному моменту Л1 ом). Для устойчивости работы двигателя необходимо обеспечить достаточную перегрузочную способность Л1тах/Л1ном=Лм. Слсдовательно, при частотном регулировании должно быть обеспечено условие тах1/Ли1 = Л1з,2/Лнг= const, (6.3) где индексы I и 2 относятся к различным частотам вращения; Ми! и Л1н2 - нагрузочные моменты при этих частотах. Так как согласно (6.2) Л ах1/Лтах2= (.UnjUnf Uulfuf, TO получаем основной закон частотного регулирования: UnlUn=Uulfn) УЖЖ2- (6.4) (6.5) Этот закон впервые сформулирован академиком М. П. Кос-тенко. Если требуется регулировать частоту вращения при постоянном нагрузочном моменте CAf =const), то уравнение (6.5) принимает вид ll ll = 12 l2 = COnst, (6.6) т. е. питающее напряжение следует изменять прямо пропорционально его частоте. При этом мощность двигателя увеличивается прямо пропорционально возрастанию частоты вращения. Установим охранное оборудование. Тел. . Звоните! |