
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
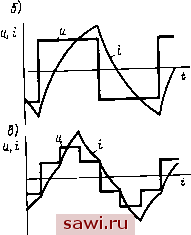
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 Если требуется поддерживать режим постоянной мощности электродвигателя р2=мнй2 = const, то, так как частота вращения q2 приблизительно пропорциональна частоте /ь получим условие hl/n = f 2/l2 (6.7) или с учетом (6.5) UnlUn-VfnIfn- ДНигатель (6.8) Выведенные соотношения являются приближенными, так как не учитывают активного сопротивления обмотки статора Ru входящего в формулу (6.1). Влияние этого сопротивления можно установить по упрощенной круговой диаграмме (рис. 6.1), диаметр которой при условии U\/\\=-= const остается неизменным. В этом случае при номинальной частоте линия моментов ОТ образует с диаметром окружности угол уном, тангенс которо- го Генератор 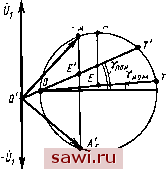 Рис. 6.1, Упрощенная круговая диаграмма при регулировании по условию fi/fi = const для различных значений частоты /1 tg yhom = RxKX, + Xl) = /?i/[2n/i, (1,4- + 2)1- При пониженной частоте и линия моментов ОТ проходит существенно выше, что снижает значение максимального момента (отрезок Л £<Лд). Увеличение частоты сверх /ihom мало сказывается на максимальном моменте, так как угол уном обычно мал. На рис. 6.2 изображены зависимости величины электромагнитного момента М. в относительных единицах от частоты тока в роторе при различных значениях частоты питающего напряжения }и построенные для асинхронного двигателя мощностью 100 кВт при законе регулирования f/i/fi = const. В двигательном режиме максимальный момент существенно снижается при уменьшении частоты из-за возрастающего влияния падения напряжения в активном сопротивлении статора I\R\, что приводит к уменьшению ЭДС и магнитного потока двигателя. В генераторном режиме максимальный момент с понижением частоты возрастает, что объясняется обратным влиянием падения напряжения I\R\ (см. отрезок АтЕ на рис. 6.2). При этом магнитный поток двигателя увеличивается. Такие характеристики в генераторном режиме нежелательны, так как при малых частотах резко возрастает электромагнитный момент, что может вызвать поломку вала машины. Часто регулирование двигателя осуществляется по закону постоянства магнитного потока. Из (3.17) следует, что электромагнитный момент асинхронного двигателя при заданной частоте /2 тока в роторе пропорционален квадрату магнитного потока: М = с cos Ь=CJФ,EM{Rl+xl)=Сф1. (6.9) fl,ru, 5д UO 30 20 10 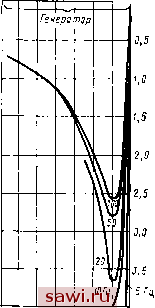 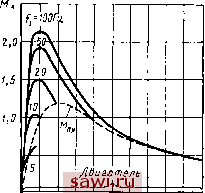 fl !0 20 JO UO 50 60 70 80 f, Гц Рис. 6.2. Зависимости M=!(U) при регулировании по условию ti i = const при различных значений частоты fi Поэтому для поддержания максимального момента неизменным требуется иметь постоянный магнитный поток, т. е. при регулировании частоты должно соблюдаться условие £i i = const. В этом случае значение момента определяется только частотой ротора fi (рис. 6.3, а) и оно одинаково в двигательном и тормозном режимах. Для обеспечения неизменного магнитного потока питающее напряжение Ui должно изменяться так, чтобы выполнялось условие I О, - Д/?, - J/,X, = const. (6.10) Но так как ЭДС Ei и реактивное сопротивление Xi пропорциональны частоте fi, а активное сопротивление Ri от частоты не зависит, то напряжение Ui должно изменяться по закону Uya + bf (6.11) где а и b - постоянные. На рис. 6.3, б показаны графики изменения напряжения Ui от частоты fi, необходимые для обеспечения указанного закона регулирования при заданных значениях частоты ротора /г, т. е. электромагнитного момента. Получить такую зависимость в электромашинных преобразователях частоты и синхронных генераторах с переменной частотой вращения весьма трудно, так как у них ЭДС пропорциональна частоте. Более гибким является регулирование при питании электродвигателя от статического преобразователя частоты, тяк Рис. 6.3. Зависимости: как в этом случае напряжение a-M-f(h): 6-U,-f(fO при регулировании Ui И ЧВСТОТВ fi МОГуТ ИЗМСНЯТЬ-по условию Ф -const . - ся по любому требующемуся закону. Система управления двигателем. Функциональная схема преобразователя частоты, питающего асинхронный двигатель, содержит следующие основные элементы: входной фильтр / (рис. 6.4, а), служащий для уменьшения пульсаций тока в питающей сети постоянного тока; регулятор напряжения 2, позволяющий изменять напряжение на асинхронном двигателе в соответствии с выбранным законом регулирования при изменении частоты; собственно преобразователь частоты 3 (инвертор), поочередно подключающий фазы обмотки статора двигателя 4 к шинам разной полярности. Рассматриваемая функциональная схема является типичной. Она позволяет наиболее четко представить все функциональные зависимости, которые существуют в преобразователе частоты: переключение фаз обмотки двигателя, регулирование напряжения и частоты, фильтрацию переменных составляющих тока, не допуская их попадания в питающую сеть. Часто в эту схему вводят раз- 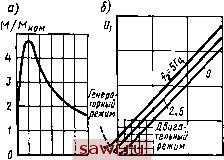 га to 50 SO f.,Гц 20 fp Гц личные изменения, например после регулятора напряжения 2 включают еще один фильтр; иногда функции преобразователя частоты и регулятора напряжения совмещают в одном устройстве и т, п. В зависимости от схемы преобразователя частоты его выходное напряжение и имеет прямоугольную (рис. 6.4, б) или ступенчатую (рис. 6.4, в) форму. В соответствии с этим изменяется и ток i в фазах двигателя. На рис. 6.5 показана однофазная мостовая схема транзисторного инвертора (без регулятора
 напряжения и фильтра), применяемого в настоящее время для регулирования частоты вращения двигателей мощностью до 10 кВт. Транзисторы можно представить в виде идеальных ключей, поочередно попарно включающихся: при включении транзисторов Т1 к Т4 к. началу фазы АХ подают положительный потенциал, а к концу ее - отрицательный. Пос-  Рис. 6.4. Функциональная схема Рис 6.5. Схема питании одной фа-преобразователя частоты (а), гра- зы обмотки статора асинхронного фики напряжения (б) и тока (а) двигателя от транзисторного ин-в фазах двигателя вертора ле их выключения и включения транзисторов Т2 к ТЗ к. концу фазы АХ подают положительный потенциал, а к началу - отрицательный. Таким образом, на фазу АХ подается переменное напряжение и прямоугольной формы. Частота питающего напряжения fi определяется частотой переключения транзисторов. При активно-индуктивной нагрузке Rh-L , которую представляет фаза статора, ток i в ней отстает по фазе от напряжения. Для его замыкания в отрезки времени, когда напряжение изменяет свою полярность, служат обратные диоды Д1...Д4. Например, после закрытия транзисторов Т1 и Т4 ток в нагрузке в некоторое время проходит в прежнем направлении -от А к X, замыкаясь через диоды ДЗ, Д2 и через источник питания (во встречном направлении), пока не уменьшится до нуля.  Схема трехфазного мостового транзисторного инвертора показана на рис. 6.6. Благодаря поочередному включению транзисторов ток последовательно проходит по контурам обмоток АВ-АС- ВС-ВА-СА-СВ-АВ, благодаря чему в двигателе создается вращающееся магнитное поле. Достоинством трехфазной мостовой схемы преобразователя является то, что в кривых фазных токов отсутствуют третьи гармонические. В ряде случаев регулирование напряжения осуществляется без установки специального регулятора - внутренними силами инвертора. Для этого выходное напряжение инвертора модулируется высокочастотными сигналами (рис. 6.7, а), при которых кратковременные импульсы напряжения сменяются паузами. Среднее напряжение за полупериод U,p = U{x)i{0,5T) = yU, (6.12) где 2т - сумма проводящих отрезков времени за полупериод Г/2; у= (2т)/(0,57) - коэффициент заполнения. Путем изменения соотношения между проводящими и непроводящими отрезками времени, т. е. изменения коэффициента заполнения, можно регулировать среднее значение выходного напряжения при неизменном значении входного напряжения. Рассмотренный метод регулирования называют широтно-импульсным. Рис. 6.6. Схема питания обмот ки статора трехфазного асин хронного двигателя от тран зисторного инвертора  Рис. 6.7. Графики изменения напряжения, подаваемого иа обмотку статора двигателя при широтио-импульсиом регулировании (а) и при ши-ротно-импульсной модуляции по синусоидальному закону (б) При широтно-импульсном регулировании в мостовом инверторе (см. рис. 6.5) в течение одного полупериода один транзистор, подающий питание на фазу статора, включен все время (например, Т2), а другой -периодически с временами т (в данном слу- чае ТЗ). Во время пауз, т. е. когда транзистор ТЗ закрыт, ток через нагрузку замыкается по контуру: транзистор 72-диод Д4 - нагрузка, т. е. минуя источник тока, благодаря чему во время пауз напряжение равно нулю. При широтно-импульсном методе регулирования напряжения влияние высших гармонических значительно сильнее (особенно при малых у), чем при прямоугольной форме напряжения. Для их уменьшения увеличивают число импульсов в полупериоде, т. е. частоту модуляции fu, делая ее не меньше чем в 12 раз выше частоты основной гармонической f инвертора (машинной частоты). + 0- - o- Фаза статора ом статора Рис. 6.8. Схемы питания одной фазы асинхронного двигателя от инвертора напряжения (а) и от инвертора тока (б) иа тиристорах При мощностях до сотен ватт это обстоятельство не создает заметных неудобств, так как частотные свойства транзисторов очень высокие. При мощностях более 10 кВт применяют не транзисторы, а более мощные вентили - тиристоры, частотные свойства которых значительно ниже, вследствие чего применение ши-ротно-импульсного регулирования требует специальных тиристоров (с повышенными динамическими свойствами), так как необходимая частота импульсов составляет примерно 5000... 10 000 Гц. Улучшение спектрального состава выходного напряжения можно получить, применив широтно-импульсную модуляцию по синусоидальному закону (рис. 6.7, б), при котором ширина импульсов изменяется в течение полупериода; наибольшая ширина импульсов наблюдается в середине периода, а к началу и концу полупериода уменьшается. На рис. 6.8, а приведена схема одной фазы инвертора на тиристорах при использовании широтно-импульсной модуляции. Кроме главных тиристоров Т1...Т4 и соответствующих им обратных диодов Д1... Д4 фаза инвертора имеет еще два коммутирующих узла, состоящих из конденсатора Ск и реактора Lk, которые служат для запирания тиристоров. Конденсаторы Ск через вспомогательные тиристоры В1... В4 заряжаются от сети прежде, чем включаются главные тиристоры. Например, перед включением тиристоров Т1 и Т4 конденсаторы должны иметь полярность, показанную на 7254 Установим охранное оборудование. Тел. . Звоните! |