
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 рис. 6.8. По сигналу управления тиристоры Т1 и Т4 включаются и какое-то время проводят ток. Для их запирания на вспомогательные тиристоры В1 и В4 подают импульсы управления и после включения этих тиристоров заряженные конденсаторы Ск подключаются к тиристорам Т1 и Т4 так, что разрядный ток конденсатора направляется против тиристора. В связи с этим ток через тиристоры Т1 и Т4 прекращается, а конденсаторы продолжают разряжаться через нагрузку и обратные диоды до тех пор, пока напряжение на них не изменит знак и оно станет равным напряжению питания (или несколько больше). После перезаряда конденсаторы оказываются подготовленными к запиранию тиристоров Т2 и ТЗ. Для запирания тиристоров Т2 и ТЗ (при широтно-импульсной модуляции) открывают вспомогательные тиристоры В2 и ВЗ. Приведенный пример показывает сложность выполнения инвертора на тиристорах, для которого кроме главных тиристоров требуются узлы запирания, состоящие из вспомогательных тиристоров, конденсаторов Ск и реакторов Ьк. Это увеличивает массу и стоимость инверторов и снижает их надежность. Кроме того, в инверторах рассмотренного типа (инверторах напряжения) возможны очень большие пики тока при малых частотах вращения двигателя. Это объясняется тем, что минимальная длительность приложения напряжения tmin довольно велика, так как она определяется временем перезаряда коммутирующего конденсатора. При малой частоте вращения двигателя ЭДС вращения в обмотке статора практически отсутствует и за период проводящего состояния инвертора ток в обмотке возрастает по закону: в нагрузке. Недостатками инвертора тока являются наличие мощного реактора и необходимость иметь на входе регулятор напряжения. При питании инвертора от сети переменного тока его можно выполнить без коммутирующих узлов (инвертор с непосредственной связью). Каждая фаза такого инвертора (рис. 6.9, а) связана с каждой фазой сети двумя тиристорами, включенными встречно-параллельно. Поэтому каждую фазу двигателя можно подключить к трехфазной сети в любом сочетании с другой фазой. На рис. 6.9,6 (6.13) 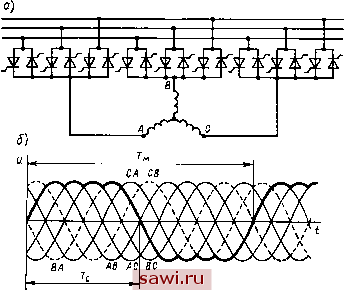 достигая максимума при t=x. В (6.13) Ri и R2 - активные сопротивления обмоток двигателя; Li и L2 - их индуктивности. Используют и другой тип инвертора - инвертор тока, в котором не может возникать больших пиков токов, а коммутирующие устройства существенно упрощаются (рис. 6.8, б). На входе такого инвертора включают мощный реактор Lbx, вследствие чего ток в нем практически неизменен и равен току нагрузки (i=Ia). При включенном состоянии тиристоров Т1 и Т4 ток в нагрузке проходит от начала фазы к концу, а коммутирующий конденсатор Ск заряжается с полярностью, показанной на схеме. Когда нужно изменить направление тока в нагрузке, подают отпирающие импульсы управления на тиристоры Т2 и ТЗ. При этом разрядный ток коммутирующего конденсатора ускоряет включение тиристоров Т2 к ТЗ к способствует выключению тиристоров Т1 и Т4. Затем конденсатор перезаряжается, изменяя свою полярность, и оказывается подготовленным к следующему циклу изменения тока Рис. 6.9. Схема питания асинхронного двигателя от инвертора с непосредственной связью с сетью переменного тока (а) и графики напряжения, подаваемого на его фазы (б) показано образование из напряжения сети с периодом Тс выходного напряжения пониженной частоты с периодом Тк, которое подают на обмотку двигателя. Недостатком рассматриваемого инвертора является то, что его максимальная выходная частота меньше частоты сети практически в 2-3 раза. Поэтому подобные преобразователи частоты применяют только для питания мощных тихоходных асинхронных двигателей. Системы управления преобразователя частоты должны регулировать выходные напряжения и частоту преобразователя по требуемому закону. Как показано выше, очень распространенным является регулирование при постоянном магнитном потоке двигателя Ф и постоянной частоте ротора г. так как такой закон регулирования обеспечивает близкие к оптимальным условиям работы двигателя во всем диапазоне частоты вращения при постоянном моменте нагрузки. Для поддержания постоянного потока Ф при постоянной частоте ротора /г необходимо обеспечить, чтобы /i = /o-t-(-/г) const, так как постоянство Ф = const обусловливает неизменность намагничивающего тока /o /n=const, а постоянство f2=const и, следовательно, M = const - постоянство тока ротора /г. Таким образом, для частотного регулирования асинхронного двигателя можно применить систему управления, структурная схема которой приведена на рис. 6.10, а. Преобразователь частоты ПЧ получает питание от источника тока ИТ и подает трехфазное напряжение на статор асинхронного двигателя АД. Q) ИТ  I HUM
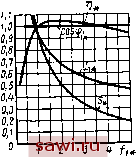
i г 3 4 5f, Рис. 6.10. Функциональная схема системы управления асинхронным двигателем при регулнроваинн по условию O = const (а) и зависимость тока Ti от частоты /г (б) Система автоматического регулирования должна устанавливать в преобразователе ПЧ такое выходное напряжение Ui и частоту fu чтобы в статоре двигателя проходил заданный ток /i, а ротор имел заданную частоту /2. Для этого система должна иметь два канала управления, один из которых задает величину Ui в соответствии с измеренным значением тока статора /ь а второй - частоту fg. В нее входят датчики ДТ и ДЧ тока /i и частоты fp, пропорциональной частоте вращения ротора, и устройства, задающие сигналы уставки /ly и /гу, пропорциональные требуемым значениям тока 1\ и частоты /2- При этом частота fi = = f2y+fp. На рис. 6.10, б показана зависимость тока статора от частоты тока в роторе при постоянном магнитном потоке Ф = Фном, построенная для двигателя мощностью 100 кВт. Приведенная кривая соответствует оптимальному закону регулирования, так как при отклонении от нее в область больших токов магнитный поток возрастает и в магнитной цепи возникает повышенное насыщение, а при отклонении от нее в область меньших токов магнитный поток уменьшается, что приводит к снижению электромагнитного момента и возрастанию электрических потерь. Естественно, что специфические условия эксплуатации привода могут внести существенные коррективы в указанный закон регулирования /[ и /2 (например, если двигатель длительно работает с моментами, меньшими номинального). При повышенных частотах вращения по сравнению с номинальной, как правило, осуществляется закон регулирования при посто- янной мощности согласно (6.8). Однако иногда приходится работать в режиме ослабления поля , когда пропорционально частоте вращения Мг изменяется частота /1 питающего напряжения, а первичное напряжение f/i остается неизменным. При этом с повышением частоты fi уменьшаются магнитный поток и максимальный момент двигателя. Такой метод регулирования используют только в том случае, если максимальная частота вращения незначительно превышает номинальную: П2тах<:1,4п2ном. При этом снижение максимального момента не слишком велико, а система управления существенно упрощается. 6.2. Особенности работы и устройства частотно-регулируемых двигателей Номинальная частота вращения и частота тока. В большинстве электроприводов частотно-регулируемые двигатели работают при изменяющихся значениях Пи fi к Ui в определенных диапазонах и по заданным законам. Так как двигатель не связан со стандартной частотой тока в сети, то номинальные значения частоты тока и частоты вращения можно выбирать максимально приближенными к оптимальным с точки зрения получения минимальной массы (стоимости), габаритных размеров двигателя и его экономичной работы в заданном диапазоне регулирования. При этом должны учитываться возможности достижения необходимой кратности частоты на входе и на выходе преобразователя частоты. За номинальную (расчетную) частоту вращения магнитного поля MiHOM обычно принимают ее значение при максимальном расчетном моменте в заданном диапазоне регулирования. При работе двигателя в продолжительном режиме с постоянным моментом за номинальную частоту вращения Mihom принимают ее максимальное значение. Номинальная (расчетная) частота тока /ihom при заданном диапазоне изменения Пх от Mimax до Mimin определяется по формуле /lHOM = /lmax ClHOM/lmax) Ей соответствует число пар полюсов P = 60/i om/ 1hom- (6.14) (6.15) Если диапазон изменения не задан, то значению /иом соответствует частота вращения 1 om = 60/i m/P, (6.16) Где число пар полюсов р определяется по табл. 6.1. Таблица 6.1
 Меньшие значения частоты в этой таблице соответствуют двигателям с относительно большими удельными потерями в стали, большие - двигателям с малыми удельными потерями в стали (высоколегированные стали). Диапазон изменения частоты и напряжения и законы их регулирования. Применение того или иного закона регулирования частоты и напряжения зависит от конкретных требований, предъявляемых к электроприводу. Если требуется осуществить управление двигателем при P2=const, что характерно для тягового привода, то при использовании закона регулирования, согласно (6.5), все основные показатели и характеристики двигателя, кроме созфь ухудшаются (рис. 6.11). Особенно заметным это ухудшение становится примерно от половины номинального значения /ihom (граница, от которой начинается резкое ухудшение, зависит от параметров двигателя, главным образом от значения активного сопротивления обмотки статора). Поэтому применение указанного закона в области низких частот вращения, а также для приводов с глубоким ее регулированием нецелесообразно. В диапазоне регулирования вверх от номинальной частоты вращения этот закон обеспечивает работу двигателя с практически номинальным значением КПД и постоянным cos ф1. Однако в этом случае приходится ограничивать увеличение напряжения, так как это приводит к возрастанию установленной мощности преобразователя частоты. При ограничении напряжения и управлении двигателем по закону (6.8) с увеличением частоты fi происходит уменьшение магнитного потока Фт, вследствие чего кратность максимального момента снижается пропорционально частоте fi. КПД и созф] при этом изменяются незначительно (рис. 6.12). Таким образом, в рассмотренном случае диапазон регулирования ограничивается Рис. 6.11. Зависимость основных характеристик двигателя от частоты ft при P2 = const и регулировании по закону гласно (6.5) величиной км, и возрастание частоты вращения возможно лишь до тех пор, пока Лм не уменьшится до величины 1,2... 1,3. Такие пониженные значения к допускаются потому, что обычно для управления двигателем применяют замкнутую систему регулирования напряжения и частоты, которая исключает возможность нарушения его устойчивости. При управлении двигателем с неизменным нагрузочным моментом, что характерно для кранового привода, целесообразно использовать закон регулирования согласно (6.11), обеспечивающий постоянство магнитного потока. В этом случае при снижении частоты в связи с относительным возрастанием падения напряжения IiRi в активном сопротивлении обмотки статора напряжение Ui уменьшается в меньшей степени, чем fi. При этом ток статора /i, КПД и С08ф1 изменяются в сравнительно небольших пределах (рис. 6.13). Характеристики, приведенные на рис. 6.11...6.13, построены в относительных единицах /и, s., т]., со8ф1., /и, для которых за базовые величины приняты их значения при номинальной частоте; при этом /и, s., т]. и созф!. соответствуют номинальной нагрузке. ,0 0,8
г. о
Рис. 6.12. Зависимость основных характеристик двигателя от частоты ft при Р2=const, регулировании по закону согласно (6.8) и ограничении напряжения (Уi = f Bou=const ог 0,4 о,в 0,8 f, Рис. 6.13. Зависимость основных характеристик двигателя от частоты fi при Л1в = const и регулировании по закону согласно (6.11) При перегрузках желательно повышать отношение U[/fi по сравнению с номинальным режимом, например, при частотах 2... 5 Гц примерно в 2 раза и более. Оптимальное отношение при перегрузках определяется исходя из следующих соображений. Обычно в асинхронном двигателе при номинальном режиме электрические потери АРэл> (АРм + АРмех), а при перегрузках они возрастают в еще большей степени. Поэтому целесообразно в данном случае увеличивать магнитный поток, т. е. напряжение U[ с целью уменьшения тока 1и а следовательно, и потерь АРэл. Однако при этом возрастают намагничивающий ток I и магнитные потери АРм- Ограничивающим фактором при такой форсировке напряжения Ui является недопустимое возрастание тока /ц, так как при некотором предельном значении U\ влияние этого тока на потери Установим охранное оборудование. Тел. . Звоните! | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||