
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 ДРэл оказывается большим влияния активной составляющей тока /i. При низких частотах fu когда потери (АРм+АРмех) сравнительно малы, можно допускать более значительную форсировку напряжения, чем при номинальной частоте. При выборе номинальной частоты вращения двигателя и диапазона ее регулирования необходимо обеспечить равномерность вращения ротора, так как при питании двигателя от статических преобразователей частоты вращения ротора при низких частотах/i из-за влияния пульсационных моментов становится неравномерным, а при более глубоком регулировании - дискретным. Величина пульсационных моментов зависит от напряжения Uu момента инерции ротора, частоты питания fi и момента нагрузки Мя на валу двигателя и может в 2...3 раза превышать момент Мной. Путем оптимального выбора этих величин можно уменьшить указанные моменты и тем самым ограничить частоту fup, ниже которой начинает проявляться неравномерность вращения ротора. Для двигателей с высотой оси вращения Я>132 мм значение fup, при которой неравномерность частоты вращения Мг достигает ±10%, приблизительно составляет 4... 5 Гц для двигателей с 2р=4, 6 и 8 и 1,5... 3 Гц при 2р=2. Меньшие значения fup относятся к более мощным машинам. Таблица 6.2
В настоящее время в СССР разработаны частотно-регулируемые двигатели с номинальной частотой тока 60 Гц. Они выпускаются на двух исполнениях с различными диапазонами изменения частоты вращения и частоты тока, которые приведены в табл. 6.2. В соответствии с диапазонами изменения п\ и fi они имеют различные скольжения при номинальном режиме и низких частотах. Законы регулирования для указанных исполнений приведены в табл. 6.3. Перегрузочная способность. Частотно-регулируемые двигатели в основном работают с различными регуляторами напряжения или магнитного потока, которые обеспечивают устойчивую работу двигателя. Поэтому перегрузочную способность км. в ряде случаев можно уменьшить. Максимальный момент двигателя из-за несинусоидальности питающего напряжения меньше, чем в таком же двигателе, работающем при синусоидальном напряжении. Значение его зависит от степени искажения напряжения, т. е. от типа преобразователя частоты. В зависимости от особенностей системы регулирования перегрузочная способность при разных частотах вращения двигателя может быть различной. При заданном значении k и номинальном режиме перегрузочная способность при низких частотах f\ зависит от значения магнитного потока и насыщения магнитных путей потока рассеяния. В двигателях общего назначения мощностью 20... 250 кВт магнитный поток при 2... 3-кратной перегрузке уменьшается до 80 ...85% номинального значения. Поэтому даже в хорошо использованных в магнитном отношении машинах можно кратковременно при перегрузках повысить значение потока в 1,1 раза по сравнению с номинальным режимом. В частотно-управляемых двигателях при минимальной частоте вращения и указанных выше перегрузках магнитный поток можно увеличить примерно в 1,3... Таблица 6.3
1,4 раза, что обеспечивает возрастание перегрузочной способности /гм приблизительно в 2 раза. Увеличению kyi способствует также уменьшение индуктивных сопротивлений Xi + X2 в результате увеличения насыщения зубцов и магнитных путей потока рассеяния из-за возрастания магнитного потока и тока нагрузки. Исследованиями установлено, что это обстоятельство при частотном регулировании приводит к увеличению максимального момента примерно в 1,3... 1,4 раза. Таким образом, принятые для двигателей общего применения значения /jm= 1,8... 2,2 при номинальном режиме достаточны для обеспечения нормальной работы частотно-регулируемых двигателей в диапазоне частот вращения ниже номинальной. Пуск частотно-регулируемых двигателей производится путем плавного изменения частоты fu что позволяет во многих случаях избежать возможности их работы при скольжениях выше критических. Поэтому при проектировании двигателя значения пускового и минимальных моментов и пускового тока обычно не задают. Это позволяет выполнить обмотку ротора с минимальным сопротивлением и, следовательно, уменьшить массу и увеличить КПД двигателя. Форма паза также может быть выбрана без учета пусковых характеристик; в ряде случаев можно отказаться от скоса пазов. Динамические качества. Частотно-регулируемые двигатели часто работают при непрерывных изменениях частоты вращения, частоты тока и напряжения. В связи с этим необходимо особо учитывать динамические свойства двигателей, обеспечивать мини- мальное время переходных процессов в электроприводе при минимальных значениях перерегулирования по току, частоте и напряжению. К работе двигателей общего назначения эти требования, как правило, не предъявляются. Быстродействие двигателя a f, определяемое скоростью изменения его частоты вращения при изменении частоты питания fi, зависит от выбора основных параметров машины. На основании проведенных исследований установлено, что при проектировании частотно-управляемых двигателей с улучшенными динамическими свойствами надо стремиться к снижению момента инерции /, индуктивных сопротивлений Xi, Xz, Хт и активных сопротивлений R\ и R2, что связано ио о,в 0,6 0,4 ио г,о K(f
Рис. 6.14. Зависимости основных параметров двигателя (а), массы его активных материалов и основных размеров (б) от быстродействия С изменением массы и основных размеров двигателя. На рис. 6.14, а приведены в качестве примера зависимости указанных параметров в относительных единицах от быстродействия, а на рис. 6.14, б - зависимости от быстродействия массы та, активных материалов, диаметра Da сердеч- ника статора и его длины U (в качестве базового двигателя с быстродействием а /.= 1 принят двигатель серии 4А мощностью 5 кВт). Очевидно, что повышение быстродействия связано с изменением массы и основных размеров двигателя. Энергетические показатели. При работе частотно-регулируемых двигателей желательно, чтобы они имели оптимальные энергетические показатели во всем диапазоне регулирования, что обычно не предусматривается в двигателях общего назначения. Проведенными исследованиями установлено, что несинусоидальность питающего напряжения влияет на энергетические показатели двигателя следующим образом: 1) КПД и созф! при работе двигателей от преобразователя частоты меньше, чем при работе от сети с синусоидальным напряжением. КПД ниже в среднем на 2... 3%. а созф! - на 5%. 2) Несинусоидальность напряжения приводит к возникновению добавочных высокочастотных потерь, что увеличивает нагрев двигателя и снижает в результате этого примерно на 10...25% величину полезной мощности на валу двигателя. Добавочные потери в обмотках и в стали магнитопровода возникают от действия высших гармоник тока и магнитного потока, созданных высшими гармониками питающего напряжения. Электрические потери в обмотках от токов высших гармоник [см. (4.42)] определяются согласно (4.43) и составляют для каждой гармоники АРэлу=АРэл.к/у, где АРэл.к - потери мощности при синусоидальном напряжении в режиме короткого замыкания (при пусковом токе); v - порядок высшей гармоники. Потери от действия всего спектра высших гармоник при питании двигателя прямоугольным напряжением согласно (4.46) увеличиваются по сравнению с потерями при синусоидальном напряжении для машин большой и средней мощности в 1,11... 1,30 раза, а для машин малой мощности - в 1,02... 1,05 раза. Самой опасной является третья гармоника напряжения, так как она имеет наибольшую амплитуду и сравнительно небольшую частоту. Поэтому во всех устройствах частотного регулирования принимают меры по уничтожению третьей гармоники тока путем применения специальных реакторов или соединения обмоток двигателя звездой, что исключает прохождение совпадающих во времени третьих гармоник тока. При изменении частоты питающего напряжения изменяется значение потерь АРэлу для каждой гармоники. При этом отношение потерь от тока v-й гармоники при некоторой частоте / к потерям от той же гармоники при номинальной частоте /ном &Р (6.17) ал,/ влиом иом/ \к,иом ел / алином vHoM t-\-R2\i X=Xxy + Xi + v/ (6.18) где Pv-Piv t A 2v; Av=iy-t-A 2v. Если принять f/vf/f/vH0M f/fH0M (отсутствуст рсгулятор магнитного потока двигателя) и Xf/Xvaouf/fHOM (пренебрегая изменением индуктивного сопротивления из-за вытеснения тока), то (6.17) или (6.18) можно представить в виде ел / эл<иои ком ( /hom)2J o (6.19) VHOMPvf* то И Так как при /</ном Pvf/PvHOM< 1 и ( ном)Р электрические потери в обмотках АРэлуг<АРэлуном. Более подробный анализ показывает, что и при наличии регулятора магнитного потока при /</ном также соблюдается неравенство АРэл vf<APэлv ном. Магнитные потери в стали от токов высших гармоник обычно невелики, так как амплитуды высших гармоник магнитного потока малы. Приближенно можно принять, что создаваемая ими индукция в стали магнитопровода fi,~f/, . = i.W). (6.20) Магнитные потери в стали магнитопровода можно оценить AP v=fiVv, тогда отношение потерь от v-й гармоники к потерям от основной гармоники м, П-Г=4т (6-21) Из (6.21) следует, что магнитные потери резко убывают с увеличением номера гармоники. Так, например, магнитные потери в стали от пятой гармоники составляют менее 0,5% основных маг-Таблица 6.4
нитных потерь, от седьмой гармоники - 0,2% и т. д. Суммарные потери в стали от высших гармоник, определенные по (6.21), не превышают 1%- Формула (6.21) не является точной, так как магнитные потери APmv от высших гармоник возникают из-за перемаг-ничивания стали по частичному циклу и имеют несколько большую величину (обычно 2...3%), однако это не меняет вывода о незначительном увеличении потерь в стали. При пониженных частотах fi питающего напряжения магнитные потери APmv уменьшаются так же, как и основные потери АРм1. Следовательно, максимальные потери APmv+APmi имеют место при максимальных значениях частоты fi. Мощность двигателя. По указанным выше причинам при использовании машин общего назначения в качестве частотно-регулируемых их мощность уменьшается (табл. 6.4). При создании специальных частотно-регулируемых двигателей, разработанных на базе магнитопроводов общего назначения, мощность двигателя в 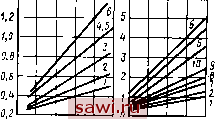 О 50 т 150 200D,M 200 300 Ш 500 В. мм том же габарите при заданной частоте вращения и оптимальной частоте тока возрастает примерно на 20% при ni = 3000 об/мин; на 157о -при ,11=1500 об/мин и на 10%-при 1 = 1000 и 750 об/мин. При создании частотно-регулируемых двигателей со специально разработанными магнитопроводами мощность двигателей возрастает при тех же условиях соответственно на 35, 20 и 15%. Приведенные в табл. 6.4 соотношения относятся к условиям работы двигателя от серийных статических преобразователей частоты со ступенчатой формой кривой выходного напряже- а) ния и коэффициентом нели- g-, мм . мм нейных искажений 30%-При этом КПД серийного двигателя, используемого в качестве регулируемого, снижается на 2...4%, а cos ф1 - в среднем на 5%; в регулируемых двигателях, выполненных на магнитопроводах двигателей серии 4А, снижение КПД составляет 1...2%. С05ф1 - 2...3%; в регули- емых двигателях, выполнен- Рис- 6.15. Зависимости величины воздушно-ных СО специально разрабо- ° °Р Р. Различном числе полюсов и значениях Ки- тайными магнитопроводами, , 2р=. ,1.7. , 2р 8, ю, * >2; 3-КПД примерно одинаков, а 2р-4. 6. А <2; 4-2р-4. 6, * 5.3; 5 - 2р-2. при 1 = 3000 об/мин выше, * =е2, 2; S-2P-2. А 5 3; 7-2р-6. * =е2; -чем в двигателях серии 4А. 2р-6. *м5.3: S-2p-4. * <2: /0-.2р-4. * 5.3 Устройство частотно-регулируемых двигателей. Они выпускаются на основе двигателей общего назначения с учетом максимальной унификации основных конструктивных элементов. При этом изменяются магнитопроводы, обмотки статора и ротора и подшипниковые узлы. В двигателях предусматривают независимую вентиляцию (так как при самовентиляции тепловой режим машины при низкой частоте вращения резко ухудшается), вывод второго конца вала для размещения датчика частоты вращения и согласование расчетного напряжения обмотки статора с напряжением преобразователя частоты. Проведенные расчетные и экспериментальные исследования показали, что при проектировании рассматриваемых двигателей следует выбирать увеличенный воздушный зазор по сравнению с двигателями общего назначения. Увеличение воздушного зазора способствует уменьшению потерь мощности и добавочных моментов, возникающих при питании двигателя несинусоидальным напряжением. Чем меньше число полюсов и больше мощность двигателя, тем менее существенно снижается созф! (относительное значение намагничивающего тока у таких двигателей уменьшает- Установим охранное оборудование. Тел. . Звоните! | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||