
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 ся). Значения воздушного зазора для двигателей с различным числом полюсов и различными значениями приведены на рис. 6.15. Из приведенных графиков следует, что при увеличении диаметра сердечника воздушный зазор, как и у обычных асинхронных двигателей, следует увеличивать. В двигателях с меньшим числом полюсов (т. е. с большей частотой вращения), а также с большей кратностью максимального момента км воздушный зазор должен быть большим. Обмотку статора в частотно-регулируемых двигателях выполняют как с диаметральным, так и с укороченным шагом. Диаметральная обмотка позволяет получить большую мощность при заданных длине и диаметре статора, а обмотка с укороченным шагом - уменьшение активных и индуктивных сопротивлений при заданной длине статора и меньший вылет лобовых частей. Улучшение формы кривой МДС и снижение за счет этого провалов в механической характеристике, достигаемые путем укорочения шага, в данном случае не имеют значения. Диаметральную обмотку целесообразно применять в двигателях, имеющих относительно большие значения отношения L/t, при которых длина пазовой части обмотки больше длины лобовой части, а также в двигателях с * <2,5. Если >2,5, то следует увеличивать число пазов. Пазы статора целесообразно выполнять полуоткрытыми или открытыми, так как при этом уменьшается активное сопротивление обмотки и повышается ее электрическая прочность, а следовательно, и надежность машины. При этом из-за большего воздушного зазора влияние пазов на пульсацию поля в зазоре и поверхностные потери, а также на увеличение эквивалентного воздушного зазора проявляются в меньшей степени, чем в двигателях общего назначения. Так как пусковой и минимальный моменты не оговариваются при разработке частотно-регулируемого двигателя (он не работает при скольжении, превышаюшем критическое), выбор формы паза ротора должен производиться только на основании требования получения минимально возможных активных и индуктивных сопротивлений обмотки, что обеспечивает уменьшение потерь и повышение максимального момента. Как показали исследования, целесообразно, чтобы пазы ротора имели трапецеидальную или грушевидную форму. Ширина пазов статора и ротора определяется по максимальному значению индукции в зубцах так же, как и для двигателей общего назначения. Из-за увеличения воздушного зазора возрастает его магнитное сопротивление, вследствие чего представляется возможным несколько увеличить насыщение стали зубцов. При этом чем больше насыщение машины, тем меньше сопротивление Ц\ (больше площадь пазов при заданных объемах стали), а следовательно, и потери от высших гармоник; насыщение машины приводит также к повышению максимального момента Л1тах. 6.3. Многоскоростные двигатели В многоскоростных двигателях регулирование частоты вращения осуществляется путем изменения числа пар полюсов; оно позволяет получить ступенчатое изменение частоты вращения. На рис. 6.16 показана простейшая схема (для одной фазы), позволяющая изменять число полюсов обмотки статора в 2 раза. Для этого каждую фазу обмотки статора разделяют на две части, которые переключают с последовательного соединения на параллельное. Из рис. 6.16 видно, что при включении катушек 1-2 и 3-4 в две параллельные ветви число полюсов уменьшается в 2 раза и, следовательно, частота вращения магнитного поля увеличивается в 
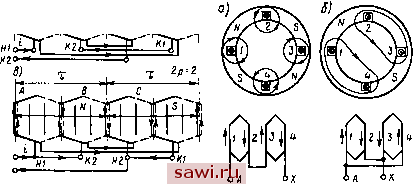 Рис. 6.17. Схема одной фазы полюс- Рис. 6.16. Схема переключения одной но-переключаемой обмотки: фазы обмотки статора для изменения а - при 2р-4; б, в - при 2р-2 ЧИСЛа ПОЛЮСОВ: а - при 2р-4; б - при 2р-2 2 раза. При переключении число последовательно включенных витков в каждой фазе уменьшается вдвое, но так как частота вращения возрастает в 2 раза, ЭДС, индуцированная в фазе, остается неизменной. Следовательно, двигатель при обеих частотах вращения может быть подключен к сети с одинаковым напряжением. Чтобы не осуществлять переключения в обмотке ротора, последнюю выполняют короткозамкнутой. Если нужно иметь три или четыре частоты вращения, то на статоре располагают еще одну обмотку, при переключении которой можно получить дополнительно две частоты. Каждая фаза обмотки статора двухскоростного двигателя с переключением числа полюсов в отношении 2 : 1 состоит из двух частей, в каждой из которых имеется одинаковое число катушечных групп. Когда обе эти части обтекаются токами одинакового направления, создается магнитное поле с большим числом полюсов (рис. 6.17, а); при изменении направления тока в одной из частей число полюсов уменьшается вдвое (рис. 6.17, б, в). Такие переключения направления тока должны осуществляться во всех фазах одновременно, причем переключаемые части обмотки могут соединяться последовательно (рис. 6.17, б) или параллельно (рис. 6.17, в). 380°
Рис. 6.18. Чередование фазных ЗОИ полюсно-переключаемой обмотки при изменении числа полюсов в OTHOuieHHH 2 : 1 Ширина фазной зоны, занимаемой сторонами катушки каждой катушечной группы, и величина шага обмотки в зубцовых делениях при обоих числах полюсов одинаковые. Однако так как полюсное деление т при переключениях числа полюсов изменяется в 2 раза, то фазная зона в электрических градусах и относительный шаг обмотки также изменяются. При меньшем числе полюсов фазная зона составляет а = = 60°, а при удвоенном числе а= = 120°. Нормальное чередование фазных зон при одинаковом направлении вращения магнитного поля показано на рис. 6.18, а, б. Из рассмотрения рис. 6.18 следует, что в этом случае, кроме изменения направления токов в зонах X, Y yi Z (т. е. их превращения в зоны Л, В и С), для сохранения неизменным направления тока необходимо также переключать концы двух фаз обмотки (например, В и С). Шаг обмотки при большем числе полюсов принимают равным полюсному делению у=х, так как при таком шаге и 0=120° кривая распределения МДС наиболее близка к синусоидальной. При меньшем числе полюсов 1/=0,5т; в этом случае на основную гармонику МДС накладываются четные гармоники, из которых наиболее существенными являются вторая и четвертая. Это приводит в двигателях с переключением числа полюсов к появлению провалов в механической характеристике и увеличению уровня магнитного шума при неблагоприятном соотношении числа пазов ротора и статора, а также к ухудшению энергетических показателей по сравнению с нормальными двигателями с фазной зоной а=60° и j/=(0,8...0,856)t. На рис. 6.19 показаны наиболее часто употребляемые схемы соединений обмотки статора с переключением числа полюсов в отношении 2:1 (схемы Даландера). Схемы звезда -двойная звезда (рис. 6.19, а, б) обеспечивают переключение при постоянном моменте, а схемы треугольник - двойная звезда , приведенные на рис. 6.19, в, г, - при приблизительно постоянной мощности. Как видно из схем, приведенных на рис. 6.19, при переходе от меньшей частоты вращения к большей изменяется направление тока в половине полуобмоток фаз статора. Для того чтобы направление вращения поля при этом осталось неизменным, необходимо также переключить концы двух фаз обмотки (например, фазы В и С). а)А S С ) А в с А в о ) А в с 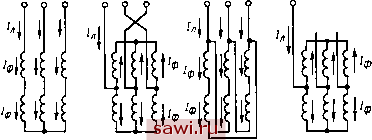 2р=4 2р--г гр--2 Рис. 6.19. Принципиальные схемы соединения обмотки статора при переключении числа полюсов в отношении 2: 1 Рассмотрим отношение потребляемых мощностей Pi и моментов М для рассматриваемых схем при упрощенном предположении, что линейное напряжение (/л, ток /ф в каждой полуобмотке фазы статора, КПД т] и cos ф остаются неизменными. При этом для схем, изображенных на рис. 6.19, а, б, имеем Рп У1/л/л1 cos <р VSUJcosf М2 Р22 21 Pl2 ?2П Ml q22 Р21 22l Для схем, изображенных на рис. 6.19, в. г, имеем Pl2 ybUJ 2c0s<f УШ 21фС05<{ (6.22) Рп УШ J icos М2 Р22 2l Pi2 2l Ml Q22 Р21 22 Рп /зг/д/з/фС08<р 0,575=0,5. = 1,15;=:;1; (6.23) В системах (6.22) и (6.23) индексы 1 обозначают меньшую частоту вращения, а индексы 2 - большую частоту вращения. При использовании схем, приведенных на рис. 6.19, в, г. обычно для обеих частот вращения указывают одинаковую мощность, т. е. принимают, что Pi2=Pii и M2=0,5Mi. Механические характеристики двигателя при переключении полюсов двумя рассмотренными способами приведены на рис. 6.20. Для переключения числа полюсов в отношении, не равном 2: 1, применяют обмотки статора, выполненные по схемам тройная звезда с выводами из нулевых точек , Харитонова и переключаемые по принципу амплитудной модуляции. 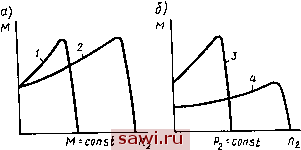 Рис. 6.20. Механические характеристики двухскоростного двигателя с переключением числа полюсов в отношении 2: 1 при постоянном моменте (а) и при постоянной мощности {б) В схеме тройная звезда с выводами из нулевых точек (рис. 6.21, а, б) катушки обмоток фаз при каждом числе полюсов соединяют в три параллельные ветви - тройную звезду . В каждой ветви при прохождении по ним переменного тока создается пульсирующее магнитное поле, содержащее сильно выраженные пространственные гармоники. Пространственное положение этих гармоник таково, что ветви, подключенные к соответствующим фазам А, В и С сети и обтекаемые одинаковыми токами, образующими симметричную систему, взаимно усиливают одну из гармонических составляющих магнитного поля при данном числе полюсов и уничтожают составляющую, соответствующую другому числу полюсов. Например, при схеме обмотки на четыре и шесть полюсов (рис. 6.22) обмотка выполняется так же, как одно-двухслойная: она состоит из больших катушек, занимающих весь паз, и малых катушек, занимающих по половине паза. Одно- и двухслойные части обмотки занимают одинаковое число пазов. По 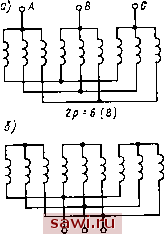 А в С Zp--U(6) Рис. 6.21. Схема соединения катушек фаз при выполнении полюсно-переключаемой обмотки по схеме тройная звезда с выводами из нулевых точек (а) и кривые МДС (б)  2 jl USsi 8 9 WiUlWi* 151Ва181320и22Ь2*твгПВт1131323Щ3518 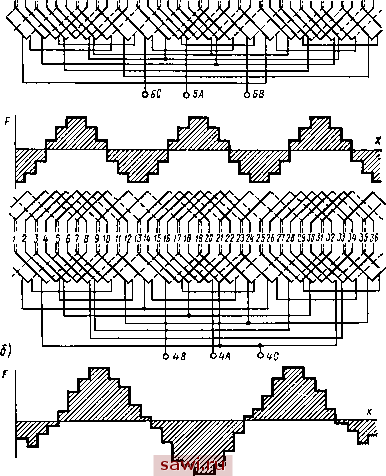 Рис. 6.22. Развернутые схемы и кривые МДС одно-двухслойной полюсно-переключаемой обмотки, выполненной по схеме тройная звезда с выводами из нулевых точек с параметрами т=3, z=36, а=3: а - при числе полюсов 2р-6; 6 - прн 2р-4 Установим охранное оборудование. Тел. . Звоните! | ||||||||||||||||||||||||||