
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 уменьшении Ui резко снижается максимальный момент iWm.x, т. е. перегрузочная способность двигателя (кривые /, 2 и 3 на рис. 6.30). Критическое скольжение, определяющее зону устойчивой работы двигателя, остается при этом неизменным (skp=0,1 ...0,2), вследствие чего регулирование возможно только в сравнительно узких пределах. Принципиально рассматриваемый способ можно использовать для регулирования двигателей с большим активным сопротивлением ротора, так как в этом случае 5кр резко возрастает и максимум момента сдвигается в зону, где s 1 (кривые 1, 2 и <?), и даже в область, где s>l. Однако это ведет к значительному увеличению потерь мощности и снижению КПД. Поэтому такой способ регулирования частоты вращения обычно применяют в микродвигателях, для которых величина КПД не имеет решающего значения. 6.5. Работа асинхронной машины в тормозных режимах Асинхронная машина может работать в следующих тормозных режимах: генераторном с отдачей электрической энергии в сеть {рекуперативное торможение); электромагнитного торможения {торможение противовклю-чением); генераторном с гашением выработанной электрической энергии в цепи ротора {динамическое или реостатное торможение). Во всех этих режимах электромагнитный момент, развиваемый асинхронной машиной, воздействует на ротор в направлении, противоположном П2, т. е. является тормозным моментом. Режим рекуперативного торможения. Этому режиму на круговой диаграмме (рис. 6.31, а) соответствует часть окружности токов, лежащая ниже линии OG. Механическую характеристику асинхронной машины в генераторном режиме (рис. 6.31,6) можно построить по круговой диаграмме или по формуле (4.1) при подстановке в нее отрицательных скольжений. Характер механической характеристики в генераторном режиме сходен с двигательным: по мере увеличения скольжения s от точ-  Рис. 6.31. Круговая диаграмма (а) и механическая характеристика (б) при работе асинхронной машины в различных режимах КИ, где 5=0, электромагнитный момент сначала растет, достигает максимума при каком-то скольжении, а затем уменьшается. Из круговой диаграммы видно, что максимальный момент в генераторном режиме больше, чем в двигательном, на 30...50%. Это объясняется тем, что в генераторном режиме E\>Uu а следовательно, при равных напряжениях сети величины магнитного потока и максимального момента больше. Активная составляющая тока статора /ir в генераторном режиме противоположна по фазе активной составляющей тока /1дв в двигательном режиме, т. е. она сдвинута на 180° относительно вектора напряжения 1У\. Следовательно, машина отдает в сеть электрическую энергию. Сеть Сеть Сеть 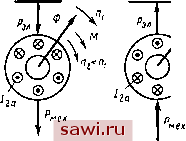
Рис. 6.32. Направление частот вращения, мощностей, момента и активной составляющей тока ротора при работе асинхронной машины в различных режимах; двигательном (а), генераторном (б) и электромагнитного торможения (в) На рис. 6.32 схематически показано направление частот вращения 1 и щ электромагнитного момента М, мощностей Рая и Рмех. а также активной составляющей тока ротора /22 при различных режимах работы машины. В двигательном режиме (рис. 6.32, а) машина потребляет из сети электрическую мощность Рэл и отдает механическую мощность Рмех. В генераторном режиме (рис. 6.32, 6) электрическая и механическая мощности направлены противоположно тем, которые имеют место в двигательном режиме. Магнитный поток вращается с частотой П\<П2, следовательно, относительно ротора он вращается в обратном направлении и создаваемый им момент М противоположен П2. Переход из двигательного режима в генераторный происходит автоматически, когда частота враш,ения ротора 2 превосходит частоту ераш,ения магнитного поля щ. Это возможно при переходных режимах работы электропривода, либо при изменении направления нагрузочного (внешнего) момента. Типичный пример - спуск груза краном, когда двигатель включается согласно с направлением спу- ска и частота вращения Пг ограничивается величиной, близкой к пи а энергия, запасаемая грузом, отдается в сеть. Генераторному режиму (рис. 6.33, а) соответствуют участки механических характеристик, расположенных в области отрицательных моментов. Форму механической характеристики в рассматриваемом режиме можно изменить путем включения в цепь фазного ротора реостата с различным сопротивлением Рд (кривые /, 2 и 3). При этом можно при заданной частоте вращения П2 получить различные тормозные моменты. Точно так же можно смещать механическую характеристику по вертикали вверх или вниз путем изменения числа пар полюсов машины 2р (кривая 4) или же изменения частоты /i питающего напряжения (см. § 6.2).
Генератор О Лйигатель 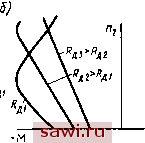 О *М Рис. 6.33. Механические характеристики асинхронной машины при различных сопротивлениях в цепи ротора Рекуперативное торможение с энергетической точки зрения весьма выгодно, так как кинетическая энергия тормозимых масс превращается в процессе торможения в электрическую, которая отдается в сеть. Недостатком этого способа является то, что при питании двигателя от сети с fi = const торможение возможно только при высоких частотах вращения П2>П\. Однако при использовании частотного регулирования асинхронных двигателей (например, в электроприводах тяговых и грузоподъемных механизмов) в процессе торможения можно плавно уменьшать частоту вращения щ до нуля и осуществлять рекуперативное торможение до полной остановки. Режим электромагнитного торможения. Если при вращающемся роторе изменить направление вращения поля асинхронной машины, то оно будет оказывать на ротор тормозящее действие. Такой режим работы машины называют режимом, электромагнитного тор-моокения. При этом частота вращения ротора П2<0 (частоту вращения П] принимают положительной), а следовательно, скольжение 5>1. Рассматриваемому режиму на круговой диаграмме (см. рис. 6.32, а) соответствует часть окружности токов, расположенная между точками /С и Г, а на механической характеристике -область, 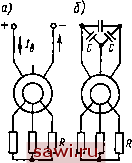 Рис. 6.34. Схемы вклю- лежащая в диапазоне скольжений 1<5<с (см. рис. 6.31, б). В режиме электромагнитного торможения активная составляющая тока 1\ совпадает по фазе с напряжением tJ Следовательно, машина потребляет из сети электрическую мощность Рэл. Однако, так как ее момент М является тормозным, она должна потреблять также и механическую мощность Р ех. Мощности Рэл и P ei, поступая в машину, превращаются в потери мощности АР (см. рис. 6.32, в), рассеиваемые в виде теплоты в самой машине и в подключенном к ее ротору реостате. Чтобы перевести двигатель в режим электромагнитного торможения, следует изменить направление вращения магнитного поля (переключив два любых провода, присоединяющие фазы обмотки статора к сети трехфазного тока) и ввести в цепь ротора добавочное активное сопротивление. Увеличение сопротивления цепи ротора необходимо для ограничения величины тока машины, который при замкнутом накоротко роторе достигает большого значения. Кроме того, если машина работает на естественной характеристике, то режим, соответствующий s>l, является неустойчивым (см. асинхронного дви-рис. 6.31, б). Включение в цепь ротора до- гателя при динамическом бавочного активного сопротивления позво- торможении ляет сдвинуть максимум момента в область скольжения s>l (обеспечив тем самым устойчивое электромагнитное торможение) и регулировать тормозной момент. На рис. 6.33, б приведены механические характеристики асинхронной машины в режиме электромагнитного торможения при различной величине добавочного сопротивления Рд в цепи ротора. Чем больше сопротивление, тем мягче механическая характеристика. При уменьшении частоты вращения ротора до нуля необходимо отключить двигатель от сети, в противном случае ротор начнет разгоняться в противоположном направлении. Практически режим электромагнитного торможения используют для быстрой остановки механизмов. Его называют также торможением противовключением. Достоинством его является то, что он позволяет создавать большие тормозные моменты при низких частотах вращения и даже при частоте вращения, равной нулю, хотя с энергетической точки зрения этот режим не выгоден, так как асинхронная машина в процессе торможения потребляет из сети электрическую энергию. Режим динамического торможения. В данном режиме статор асинхронной машины отключают от сети переменного тока, а затем две или три его фазы соединяют по различным схемам и подключают к источнику постоянного тока, например, согласно рис. 6.34, а. При этом в машине появляется постоянный магнитный поток воз- буждеиия, индуцирующий в обмотках ротора переменную ЭДС. Чтобы создать тормозной момент, к обмотке ротора подключают активное сопротивление R, в котором гасится энергия, возникающая в машине в результате торможения приводимого механизма. В режиме динамического торможения асинхронная мащииа превращается в автономный синхронный генератор, работающий иа реостат. Этот режим применяют для быстрой и точной остановки различных механизмов. Для анализа работы асинхронной машины в рассматриваемом режиме постоянный ток возбуждения /в, проходящий по обмотке статора, заменяют эквивалентным переменным током /экв, который создает ту же МДС Рзкв = Рв. В общем случае /экв = С/в, где коэффициент пропорциональности С зависит от схемы соединения фаз обмотки статора и числа витков в фазе. Из векторной диаграммы (рис. 6.35, а) 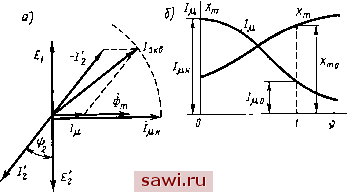 Рис. 6.35. Векторная диаграмма асиихронной машины, работающей в режиме динамического торможения (а) и зависимости I Хт от отношения Л2/п1 (б) Ток /экв при заданном значении /в не зависит от частоты вращения ротора и скольжения, под которым в рассматриваемом режиме понимается v = n2/ni- Однако так как при изменении Пг и s=v изменяются ток ротора h=E2o 20=El - значе- ние ЭДС £/ при данном намагничивающем токе и 2= О и угол i)2 = arctg [2/(/?2/s)], то, как следует из векторной диаграммы машины для данного режима (рис. 6.35, а), одновременно изменяются намагничивающий ток /ц=/экв+(-h) и индуктивное сопротивление намагничивающего контура Хт=Е\11у,. При уменьшении Пг конец вектора /экв перемещается по окружности вправо и при неподвижном роторе он возрастает до значения /н- Поэтому при малых частотах вращения и сравнительно большом токе возбуждения /в машина оказывается сильно насыщенной (рис. 6.35,6). откуда 2/,x/2Sin<j>2 + /2 . /2= (/экв.) / 1/ (/?2/5)Ч( -.+2); (6.27) M = {mil2R2ls)lQi = {mil\,.XlR2ls)lQi [(/?2/s)4(m + 2)]- (6.28) Если в первом приближении считать Лт=const, то из условия dMlds=Q М,МтЛ.х1)1{2й1 {Х .\.Х2)] ; Механическую характеристику для рассматриваемого можно построить по приближенному уравнению М X 2Af /(s/s;p-f skp/s), (6.29) (6.30) режима (4.20) (6.31) для двигательного 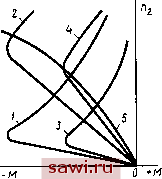 которое по своей структуре аналогично режима. При этом же значении R2 критическое скольжение skp значительно меньше скольжения 5кр=/?2/ {Х\-\-Х2) в двигательном режиме, так как ХтХх. Из-за изменения условий насыщения скольжение skp не останется постоянным для различных значений /экв. На рис. 6.36 показаны механические характеристики асинхронной машины в режиме динамического торможения. Изменять форму механической характеристики, т. е. регулировать величину тормозного момента, можно изменением: тока возбуждения /в в обмотке статора, при этом чем больше ток возбуждения /в, тем больший создается максимальный момент; активного сопротивления в цепи фазного ротора путем включения добавочного сопротивления /?д, при этом чем больше /?д, тем выше располагается кривая. Например, кривая / иа рис. 6.36 соответствует некоторому току возбуждения /щ и добавочному сопротивлению R; кривая 2 -току /в1 и сопротивлению Rk2>Rm\ кривая 3 -току /в2</в1 и сопротивлению Rnu кривая 4 -току /в2 и сопротивлению /?д2. Режим динамического торможения можно получить и при отсутствии источника постоянного тока путем подключения обмотки ста- Рис. 6.36. Механические характеристики асинхронной машины при динамическом торможении Установим охранное оборудование. Тел. . Звоните! | |||||||||||||||||||||||||||||||||||||||||||||||||