
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 полюса, не охваченную короткозамкнутым витком; Фп2 - поток, проходящий через часть полюса, экранированную короткозамкнутым витком. Потоки Фп1 и Фп2 проходят чсрсз различные части полюсного наконечника, т. е. смещены в пространстве на угол р. Кроме того, они сдвинуты по фазе относительно МДС Fn обмотки статора на различные углы - yi и у2- Это объясняется тем, что каждый полюс рассматриваемого двигателя можно рассматривать в первом приближении как трансформатор, первичной обмоткой которого является обмотка статора, а вторичной - короткозамкнутый виток. Поток обмотки статора индуцирует в короткозамкнутом витке ЭДС Ёк (рис. 7.6,6), вследствие чего возникает ток /к и МДС Рк, складывающаяся с МДС Fu обмотки статора. Реактивная составляющая тока уменьшает поток Фп2, а активная - смещает его по фазе относительно МДС fn. Так как поток Фп1 не охватывает короткозамкнутый виток, угол yi имеет сравнительно небольшую величину (4 ...9°)-примерно такую же, как угол сдвига фаз между потоком трансформатора и МДС первичной обмотки в режиме холостого хода. Угол у2 значительно больше (около 45°), т. е. такой, как в трансформаторе со вторичной обмоткой, замкнутой накоротко (например, в измерительном трансформаторе тока). Это объясняется тем, что потери мощности, от которых зависит угол Y2. определяются не только магнитными потерями мощности в стали, но и электрическими потерями в короткозамкнутом витке. Потоки Фп1 и Фп2, смещенные в пространстве на угол р и сдвинутые по фазе во времени на угол y = Yi-Y2. образуют эллиптическое вращающееся магнитное поле (см. гл. 2), которое создает вращающий момент, действующий на ротор двигателя в направлении от первого полюсного наконечника, не охватываемого коротко-замкнутым витком, ко второму наконечнику (в соответствии с чередованием максимумов потоков фаз ). Для увеличения пускового момента рассматриваемого двигателя путем приближения его вращающегося поля к круговому применяют различные способы: устанавливают между полюсными наконечниками смежных полюсов магнитные шунты, усиливающие магнитную связь между основной обмоткой и короткозамкнутым витком и улучшающие форму магнитного поля в воздушном зазоре; увеличивают воздушный зазор под наконечником, не охватываемым короткозамкнутым витком; используют два и большее количество короткозамкнутых витков на одном наконечнике с разными углами охвата. Имеются также двигатели без короткозамкнутых витков на пслюсах, но с несимметричной магнитной системой: различной конфигурацией отдельных частей полюса и разными по величине воздушными зазорами. Такие двигатели имеют меньший пусковой момент, чем двигатели с экранированными полюсами, но КПД их выше, так как у них потери мощности в короткозамкнутых витках отсутствуют. 184 Рассмотренные конструкции двигателей с экранированными полюсами- нереверсивные. Для осуществления реверса в таких двигателях вместо короткозамкнутых витков используют катушки J31... В4 (рис. 7.6, г), каждая из которых охватывает половину полюса. Замыкая накоротко пару катушек 51 и 54 или 52 и 53, можно экранировать одну или другую половину полюса и изменять таким образом направление вращения магнитного поля и ротора. Двигатель с экранированными полюсами имеет ряд существенных недостатков: сравнительно большие габаритные размеры и массу, низкий cos ф = 0,4...0,6; низкий ti = 0,25 ... 0,4 из-за больших потерь в короткозамкнутом витке; небольшой пусковой момент и др. Достоинствами двигателя являются простота конструкции и вследствие этого высокая надежность в эксплуатации; отсутствие зубцов на статоре значительно снижает шум двигателя и поэтому его часто употребляют в устройствах по воспроизведению музыки и речи. 7.2. Двухфазные исполнительные двигатели Принцип действия. В двухфазном исполнительном двигателе (рис. 7.7) одна из обмоток статора 5, называемая обмоткой возбуждения, подключается к сети переменного тока с постоянно действующим значением напряжения Us. Ко второй обмотке статора У, называемой обмоткой управления, подводится напряжение управления Uy от управляющего устройства УУ. Частоту вращения исполнительных двигателей регулируют путем изменения напряжения, подаваемого на обмотку управления, по величине и фазе. При этом изменяется форма вращающегося магнитного поля: из кругового оно становится эллиптическим. Эллиптическое магнитное поле, как показано в гл. 2, можно представить в виде двух круговых полей, вращающихся в прямом и обратном направлениях относительно направления вращения ротора. Воздействие на ротор обратно вращающегося поля создает тормозной момент и приводит к изменению формы механической характеристики двигателя, вследствие чего изменяется и частота вращения ротора. Чем больше выражена эллиптичность поля, тем значительнее уменьшается частота вращения. Однако при этом возрастают и потери мощности в двигателе. Различают три способа управления частотой вращения исполнительного двигателя: амплитудное, фазовое и амплитудно-фазовое.  Рис. 7.7. Принципиальная схема асинхронного исполнительного двигатели (а) и векторная диаграмма его напряжений (б) 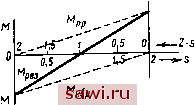 Рис 7.8. Зависимости скольжения моментов от При амплитудном управлении угол сдвига фаз р между векторами Св и Cfy (рис. 7.7, б) всегда равен 90°; изменяется только амплитуда напряжения управления, т. е. его действующее значение. При фазовом управлении напряжение управления Uy остается неизменным по величине, а регулирование частоты вращения достигается изменением угла сдвига фаз р между векторами Си и Су. При амплитудно-фазовом управлении изменяются амплитуда напряжения управления и угол сдвига фаз между напряжениями Св и Су, подаваемыми на обмотки статора. Для реализации этого способа обычно в цепь обмотки возбуждения включают фазо-сдвигающий конденсатор, а управление двигателем осуществляют путем изменения по величине напряжения управления Оу, при этом одновременно изменяется по величине и фазе напряжение Основными требованиями, предъявляемыми к исполнительным двигателям, являются хорошая управляемость при всех режимах работы и линейность механических и регулировочных характеристик (зависимость частоты вращения от подаваемого электрического сигнала). В частности, при отсутствии напряжения управления, когда двигатель работает в однофазном режиме, его ротор должен оставаться неподвижным {отсутствие самохода). В обычном однофазном двигателе результирующий момент при пуске равен нулю, однако в довольно широком диапазоне частот вращения (при s<l) он больше нуля (см. рис. 7.2). Следовательно, как было показано в § 7.1, такой двигатель может работать с некоторой установившейся частотой вращения, если его предварительно привести во вращение, Однако использовать такой двигатель в качестве исполнительного невозможно, так как при отсутствии напряжения управления он не останавливается, т. е. теряет управление. Чтобы двигатель не терял управления и останавливался в однофазном режиме, необходимо выдержать условие Л1обр> >Л1пр или, в крайнем случае, Л1обр=Л1пр. Условием отсутствия самохода в области изменения скольжения l>s>0 является выполнение неравенства pe3 = f p-Af 6p<0. Зависимость M=f{s) для прямого и обратного полей одинакова, но So6p=2- пр. Поэтому полученное условие отсутствия самохода можно записать в следующем виде: f p(s)<Af 6p(2-s). (7.5) Условие выполняется при 5кр>1. На рис. 7.8 показаны зависимости Mpea=f{s) для однофазного двигателя при 5кр>1. При этом в области скольжения l>s>0 имеет место неравенство Л1обр>Л1пр, следовательно, в однофазном режиме ротор двигателя останавливается. Устройство. Чтобы обеспечить работу двигателя при 5кр>1, необходимо выполнить его обмотку ротора с большим активным сопротивлением. При использовании ротора обычной конструкции с обмоткой типа беличьей клетки ее стержни для увеличения сопротивления выполняют из материала с повышенным удельным сопротивлением (латуни, фосфористой бронзы и т. д.) и сравнительно малым поперечным сечением. Конструкция такого двигателя 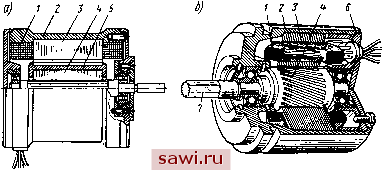 Рис. 7.9. Устройство исполнительного двигателя с беличьей клеткой на роторе: а -обычного исполнения; б - сквозной конструкции; / - обмотка статора, 2 -корпус, 3 -статор, 4 -ротор, 5 -беличья клетка, в - подшипниковый щит, 7 - вал (рис. 7.9, а) мало отличается от конструкции обычного асинхронного двигателя. Его основным недостатком является большой момент инерции ротора, снижающий быстродействие исполнительного двигателя. Для уменьшения момента инерции в двигателях этого типа применяют роторы относительно малого диаметра с отношением длины к диаметру la/Da= 1,6... 2,4. В настоящее время промышленность выпускает исполнительные асинхронные двигатели с беличьей клеткой сквозной конструкции (рис. 7.9,6). В этих двигателях внутренний диаметр статора равен диаметру расточки под подшипники в щитах, что дает возможность обрабатывать внутреннюю поверхность статора и отверстий под подшипники одновременно, после установки подшипниковых щитов. В результате удается существенно уменьшить эксцентриситет и выполнять двигатели с весьма малым воздушным зазором (0,03 ...0,05 мм), что позволяет при неизменных габаритах двигателя увеличить его вращающий момент или повысить КПД и созф. В таких двигателях для уменьшения момента инерции ротор выполняют малого диаметра (/a/jDo = 2 ... 3), а обмотку статора обычно  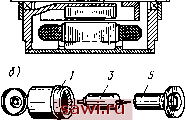 заливают эпоксидным компаундом, благодаря чему она образует вместе с пакетом статора монолитную конструкцию. Большое распространение имеют исполнительные двигатели с полым немагнитным ротором и внутренним статором (рис. 7.10). На внешнем статоре расположены две обмотки, сдвинутые в пространстве на угол 90°. Ротор выполнен в виде тонкостенного полого цилиндра из алюминия. Для уменьшения магнитного сопротивления двигателя имеется также внутренний статор, набираемый из листов электротехнической стали, так же как и внешний статор. При протекании тока по обмоткам статора создается вращающееся магнитное поле и в роторе индуцируется ЭДС, направленная по образующей цилиндра. Под действием этой ЭДС в роторе возникают вихревые токи, которые, взаимодействуя с вращающимся полем, создают электромагнитные силы и вращающий момент. Характерной особенностью двигателя с полым немагнитным ротором является значительный ток холостого хода, составляющий 85... 95% от номинального. Это объясняется тем, что в рассматриваемом Рис 7.10. Двигатель с полым ие- Двигателе расчетная величина эф-магнитным ротором (а) и его ос- фективного воздушного зазора иовные конструктивные элементы бэф = 0,6...1,2 мм (с учетом толщины у , . , полого ротора), значительно боль- / - корпус. 2 - внешний статор, 3 - f / > внутренний статор, < -обмотка стато- ШС, ЧСМ В ВСИНХрОННОМ ДВИГатСЛе Гoяlшnnш rщГ°°~ нормального исполнения (в двигателе сквозной конструкции бэф = =0,03... 0,05 мм). Иногда полый ротор выполняют ферромагнитным (стальным). При этом внутренний статор не требуется и конструкция двигателя сильно упрощается. Двигатель с полым ферромагнитным ротором имеет ряд существенных недостатков, основными из которых являются возможность прилипания ротора к статору при неравномерном воздушном зазоре или износе подшипников и пониженное быстродействие (в 10 ...20 раз) по сравнению с двигателем с немагнитным ротором (из-за увеличения момента инерции и снижения величины вращающего момента). При необходимости получить высокую частоту вращения ротора, например в гироскопических устройствах, применяются асинхронные микродвигатели с массивным ферромагнитным ротором. Такой ротор выполняет одновременно роль магнитопровода и токопрово-дящего тела. Вращающееся магнитное поле проникает в ротор на определенную глубину и индуцирует в нем вихревые токи, которые, Рис. 7.11. Принципиальная схема асинхронного тахогенератора взаимодействуя с полем, создают электромагнитный момент. Вихревые токи при пуске протекают в сравнительно тонком слое вблизи поверхности ротора (глубина проникновения 1... 3 мм при fi = = 50 Гц), поэтому эффективное активное сопротивление ротора Рзэф велико, а индуктивное Хаэф мало и двигатель развивает достаточно большой пусковой момент (Л1п/Л1ном= 1,5... 2). При разгоне глубина проникновения поля в ротор изменяется приблизительно обратно пропорционально Vs, что приводит к соответствующему уменьшению Ргэф и увеличению Двигатель с массивным ротором имеет худшие энергетические показатели, чем двигатели с беличьей клеткой на роторе, так как при номинальном режиме глубина проникновения тока и потока в тело ротора составляет 5... 15 мм, вследствие чего сопротивление /?2эф значительно больше, чем в роторе с беличьей клеткой. Для устранения этого недостатка в некоторых конструкциях на торцовых поверхностях ротора устанавливают медные короткозамыкающие кольца или покрывают поверхность ротора слоем меди толщиной 0,1...0,3 мм. При этом уменьшается скольжение ном и возрастает КПД. 7.3. Асинхронный тахогенератор Принцип действия. Конструкция асинхронного тахогенератора аналогична конструкции асинхронного исполнительного двигателя с полым немагнитным ротором. На статоре в пазах уложены две обмотки, сдвинутые в пространстве на 90°. Одна из обмоток В (возбуждения) постоянно включена в сеть, другая обмотка Г (генераторная) присоединена к нагрузке Zh (рис. 7.11), т. е. является выходной. По обмотке В проходит переменный ток, в результате чего создается магнитный поток Фа, пульсирующий с частотой сети fi. Этот поток распределен в пространстве практически синусоидально и его ось совпадает с осью обмотки возбуждения В (рис. 7.12, а), называемой продольной осью d-d. Соответственно поток, создаваемый обмоткой возбуждения, называют продольным. Ось q-q, перпендикулярную оси обмотки возбуждения, называют поперечной. Рассмотрим, какие ЭДС и токи возникают в асинхронном тахоге-нераторе при неподвижном и вращающемся роторе. При неподвижном роторе магнитный поток пронизывает обмотку возбуждения В, индуцируя в ней ЭДС Установим охранное оборудование. Тел. . Звоните! |