
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 (7.6) где Wb, koo.B - число витков и обмоточный коэффициент обмотки возбуждения. Пренебрегая активным сопротивлением обмотки возбуждения и индуктивным сопротивлением, обусловленным потоком рассеяния, для обмотки возбуждения можно записать Св + £в = 0. В идеальном случае в обмотке Г продольный поток Фй не индуцирует ЭДС, так как обмотка Г сдвинута относительно обмотки В на 90°. Следовательно, при я=0 и напряжение на нагрузке равно нулю. Однако практически точной магнитной симметрии осей указанных обмоток достигнуть невозможно, поэтому часть потока Ф/ оказывается трансформаторно связанной с обмоткой Г и индуцирует в ней некоторую ЭДС, называемую остаточной. 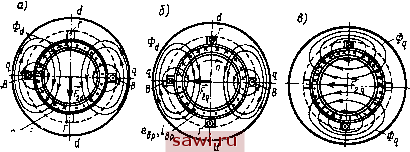 Рис. 7.12. Характер распределения ЭДС и токов, индуцируемых в полом роторе Полый ротор можно представить совокупностью ряда элементарных проводников . В каждом таком проводнике пульсирующий поток индуцирует ЭДС етр, называемую трансформаторной. Так как активное сопротивление полого ротора во много раз больше индуктивного, то ЭДС втр и вызываемый ею в роторе ток тр практически совпадают по фазе. При этом условии создаваемая током тр МДС ротора Fid действует по продольной оси машины при неподвижном и вращающемся роторе. На рис. 7.12, а показано направление ЭДС етр, тока iip и МДС Fid в момент времени, когда поток Фй уменьшается. Так как для обмотки возбуждения справедливо условие Св + £в = 0, то при возникновении продольной МДС ротора Fid в обмотке возбуждения появляется компенсирующий ток (аналогично тому, как в трансформаторе), МДС Fa которого компенсирует действие МДС Fid. При вращении ротора каким-либо посторонним механизмом в его элементарных проводниках помимо трансформаторной ЭДС бтр индуцируется еще и ЭДС вращения евр=Вх/202. гдеВ - индукция в рассматриваемой точке воздушного зазора в данное мгно- 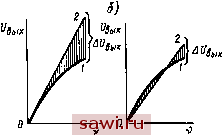 вение; h - длина ротора в магнитном поле; Vi - окружная скорость ротора. Так как поток Фй пульсирует во времени с частотой сети fu то и индуцируемые им ЭДС бвр также пульсируют с этой же частотой. При синусоидальном распределении индукции В вдоль окружности ротора максимальное значение ЭДС бвр в любой момент времени достигается в элементарном проводнике, расположенном по продольной оси машины. На рис. 7.12,6 показаны мгновенные направления ЭДС вращения бвр и создаваемых ею токов ibp в элементарных провод- ° пиках полого ротора. Следует подчеркнуть, что при любой частоте вращения направление этой ЭДС в элементах ротора, расположенных по обе стороны поперечной оси, противоположное. Если пренебречь индуктивным сопротивлением полого ротора, то направление тока I п КЯЖ7ТПМ элементе гпвпя-Р =- -З- Выходные характеристики не-1вр в каждом элементе совпа калиброванного (а) и калиброванного дает с направлением ЭДС евр.(б) асинхронного тахогенератора При этом условии токи ротора вр создают МДС Fiq и пульсирующий магнитный поток Ф которые направлены по поперечной оси q-q (рис. 7.12, в). Поток Ф, не сцеплен непосредственно с обмоткой возбуждения; в выходной обмотке Г он индуцирует ЭДС £ , = 4.44/,хеЛб.гФ,ш. (7-7) где Wt, Аоб.г - число витков и обмоточный коэффициент выходной обмотки. Частота изменения ЭДС в выходной обмотке не зависит от частоты вращения ротора и при любых условиях равна частоте изменения ЭДС бвр в роторе, т. е. частоте сети fi, питающей обмотку возбуждения. Неизменность частоты выходного напряжения является ценным свойством асинхронного тахогенератора. Рассмотрим, как связана ЭДС Вг в выходной обмотке с частотой вращения ротора. Согласно (7.7), она пропорциональна поперечному потоку 4fqm = FiglRMq, где Fiq - максимальное значение МДС ротора по поперечной оси; Ruq - магнитное сопротивление машины по этой оси. В асинхронной машине с полым немагнитным ротором эффективный воздушный зазор очень велик, поэтому магнитное сопротивление Ruq является практически неизменным (магнитное сопротивление стальных участков пренебрежимо мало). Следовательно, магнитный поток по поперечной оси практически пропорционален МДС Fjtq, которая, в свою очередь, пропорциональна току вр и ЭДС вращения евр ротора. Однако ЭДС вращения прямо пропор- циональна потоку и частоте вращения ротора Лг, поэтому при отсутствии насыщения магнитной системы ~ ~ Cl/lФ т = CjxOa V2 = С3П2, (7,8) где Ci... Сз - постоянные. Таким образом, в идеализированном тахогенераторе (при принятых допущениях) ЭДС в выходной обмотке прямо пропорциональна частоте вращения ротора. Иными словами, его выходная характеристика i/Bbix=f(v) является линейной (рис. 7.13, а, кривая 2). В реальных условиях работы тахогенератора указанная характеристика отклоняется от линейной зависимости (кривая /), т. е. появляется амплитудная погрешность Д/вых- Амплитудную погрешность можно уменьшить путем соответствующей калибровки тахогенератора. Под калибровкой понимается установление такого наклона идеальной характеристики тахогенератора (рис. 7.13,6, кривая 2), при котором отклонение в среднем от реальной характеристики / минимально. Вопросы для самоконтроля 1. Почему в однофазном асинхронном двигателе начальный пусковой момент равен нулю? 2. Как запускают однофазные асинхронные двигатели? 3. Как управляют двухфазными исполнительными двигателями? 4. Как устроены двухфазные исполнительные двигатели? б. Как устроен асинхронный тахогенератор? 6. Как зависят выходные напряжение и частота асинхронного тахогенератора от частоты вращения?  Асинхронный автономный генератор и асинхронная машина двойного питания В настоящее время в связи с усовершенствованием линейных и нелинейных конденсаторов, развитием полупроводниковой техники, увеличением частоты вращения первичных двигателей (газотурбинных и др.) создаются условия для применения асинхронных генераторов в качестве автономных источников переменного тока как в общепромышленных энергоустановках, так и в специальных энергетических системах с повышенной частотой тока. Асинхронная машина двойного питания может работать в двигательном и тормозном режимах в широком диапазоне частот вращения. Она обладает высокими регулировочными свойствами и позволяет регулировать реактивную мощность, потребляемую машиной из сети или отдаваемую ею в сеть. На основе машины двойного питания могут быть созданы различные каскадные схемы. 8.1. Асинхронный автономный генератор Устройство. Асинхронная машина, подключенная к трехфазной сети переменного тока при частоте вращения 2> i. переходит в генераторный режим (см. § 6.5). При этом реактивную мощность, необходимую для возникновения вращающего магнитного поля, машина получает из сети. Можно также обеспечить работу асинхронной машины в качестве автономного генератора, если подавать в обмотку статора необходимую реактивную мощность от батареи конденсаторов. В автономном асинхронном генераторе (рис. 8.1, а) к выходу генератора АГ, приводимого во вращение каким-либо двигателем Д, параллельно нагрузке Zh в каждую фазу подключают конденсатор С. При активной нагрузке реактивная мощность Qc. поступающая от конденсатора С, должна быть равна реактивной (намагничивающей) мощности генератора Qr, необходимой для создания его магнитного потока. При смешанной активно-индуктивной нагрузке мощность Qc должна покрывать также реактивную мощность Qa нагрузки. Схема замещения асинхронного генератора с конденсаторным возбуждением изображена на рис. 8.1,6. Она отличается от схемы замещения асинхронного двигателя наличием емкостного сопротивления Хс и сопротивления Zh в цепи нагрузки. Такие генераторы обычно выполняют с короткозамкнутой обмоткой ротора. Возбуждение генератора. В рассматриваемом асинхронном генераторе возникает процесс самовозбуждения, как и в генераторе постоянного тока с параллельным возбуждением. При вращении ротора в обмотке статора потоком оста- 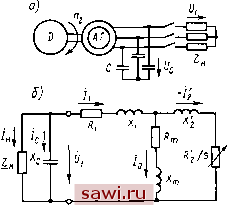 Рис. 8.1. Принципиальная схема автономного асинхронного генератора с конденсаторным возбуждением (а) к его схема замещения (б) Рис. 8.2. Характеристика холостого хода генератора и вольт-амперная характеристика конденсатора точного магнетизма индуцируется остаточная ЭДС Воет (рис. 8.2), которая создает в конденсаторе ток Ic. Этот ток, протекая по обмотке статора, усиливает его магнитный поток, в результате чего индуцируемая в генераторе ЭДС вг и ток конденсатора увеличиваются. Переходный процесс при самовозбуждении характеризуется неравенством ic{Xi-{-Xm)>icXc, где Хщ - индуктивное сопротивление намагничивающего контура, уменьшающееся из-за насыщения магнитной цепи машины; Хс - емкостное сопротивление конденсатора. В ряде случаев начало процесса самовозбуждения генератора обеспечивается путем разряда на обмотку статора предварительно заряженной конденсаторной батареи. Для того чтобы ток 1с обеспечивал при переходном процессе подмагничивание асинхронного генератора, необходимо, чтобы - с>0. Для этого вольт-амперная характеристика конденсатора должна составлять с осью абсцисс угол а<акр. При этом а = = arctgXc и aKp=arctg (Xi+Хтнн), где Хтт соответствует ненасыщенной магнитной цепи генератора. Следовательно, емкостное сопротивление Хс должно быть меньше Xi + Xmwi. Переходный процесс при самовозбуждении генератора продолжается до тех пор, пока напряжение бго не станет равным напряжению на конденсаторе Uc (точка А на рис. 8.2). Это условие можно выразить в виде равенства сопротивлений Xi + Xm=Xc, откуда емкость, необходимая для возбуждения генератора при данной частоте, C=l/I(2n/,)2(A-fAj]. (8.1) В общем случае емкость, необходимая для получения номинального напряжения асинхронного генератора при подключении к генератору активно-индуктивной нагрузки, может быть определена из выражения принимая Рг=Рн=Рном и выражая Xc=l/(u>iC) = \/{2nfiC), получим С=Я ом (tg ?Р -f tg ? )/(2n/im,f/). (8.2) где Яном-мощность, отдаваемая генератором; Uc - напряжение на конденсаторах; fi-частота тока; фг и фн -углы сдвига фаз между напряжением Ur=Uc и токами генератора и нагрузки. В соответствии с этим емкость С можно разбить на две части: постоянную Сг, необходимую для самовозбуждения генератора и режиме холостого хода, и переменную Сн, необходимую для компенсации нагрузки. На рис. 8.3 приведены зависимости емкости (мкФ) на 1 кВт активной мощности от созфг для генератора с напряжением на емкости 220 В при частоте 50 и 400 Гц. Величина cos фг асинхронного генератора, а следовательно, и емкости Сг в значительной степени зависят от частоты вращения лгном, т. е. от числа полюсов 2р машины. Так, для генератора мощностью 10 кВт, работающего при /i = 50 Гц, величина емкости Сг составляет 300 мкФ при Л2 = 3000 об/мин (2р = 2, со5фг=0,89) и 480 мкФ при Л2 = 750 об/мин (2р=8; со8фг= = 0,8). Поэтому в качестве асинхронных генераторов желательно иметь высокоскоростные машины. Емкость С зависит от характера нагрузки. Например, для компенсации нагрузки генератора мощностью 10 кВт, работающего при /i = 400 Гц, требуется емкость 60 мкФ при со5фн=0,8 и 40 мкФ при со5фн=0,9. Регулирование частоты и напряжения. Частота тока генератора при холостом ходе (s = 0) /i = pni/60 = pn2/60, т. е. она определяется частотой вращения ротора Л2 = Л1. При нагрузке генератора и неизменном значении Л2 частота вращения магнитного поля ni = = Л2/(1-s) уменьшается, так как при генераторном режиме на устойчивой части механической характеристики скольжение s<0. Изменение частоты fj при переходе от холостого хода к номинальной нагрузке Д/1 = р/г2 ном/(1-Shom) ИЛИ Afi.= 100 ihom= IOOShom (%). т. е. относительное изменение частоты численно равно скольжению, Установим охранное оборудование. Тел. . Звоните! | ||||||||||||||||||||||||||