
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 Очевидно, при скольжениях s<So машина двойного питания работает в генераторном режиме, а при s>So - в двигательном. На рис. 8.11 приведены векторные диаграммы цепи ротора при различных значениях U2 и б. При 6 = 0, когда напряжение С2 находится в противофазе с ЭДС Ё2 (рис. 8.11, а), ток Г2={5Ё2+ +02)l{R2+jsX2) и создаваемый им момент уменьшаются по сравнению с их значениями при отсутствии напряжения U2 и двигатель для сохранения прежнего значения момента AI=AfH=const работает 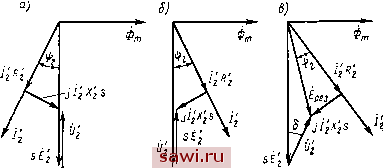 Рис. 8.11. Векторные диаграммы цепи обмотки ротора при различной фазе напряжения Ог при соответственно большем скольжении. Когда напряжение Oi совпадает по фазе с sE2, ток /2 и момент М уменьшаются и двигатель для обеспечения условия Af=AfH=const работает при меньшем скольжении. При достаточно большем значении напряжения Cfi скольжение s становится отрицательным, ЭДС sE2 и угол грг изменяют знак (рис. 8.11,6), вследствие чего и ток /2 имеет составляющую, совпадающую по фазе с потоком Фт, т. е. подмагничиваю-щую машину. Поэтому намагничивающий ток, потребляемый обмоткой статора из сети, уменьшается и cos ф1 возрастает. Аналогичный эффект имеет место, если напряжение Oi сдвинуто на некоторый угол б относительно ЭДС Ё2 (рис. 8.11, в). Таким образом, асинхронная машина двойного питания обладает высокими регулировочными свойствами, возможностью получения двигательных и тормозных режимов в широком диапазоне частот вращения и регулирования реактивной мощности. Максимально возможный диапазон регулирования частоты вращения выше 2 и ниже 1 определяется двумя параметрами: диапазоном изменения частоты fi и напряжения U2 на выходе преобразователя ПЧ. Максимальная частота вентильных преобразований, при которой достигается удовлетворительная форма кривой питающего напряжения,- 20 Гц. Следовательно, путем изменения f-z можно обеспечить диапазон регулирования По в пределах ±40% от Пь Регулирование Пг изменением величины и фазы напряжения U2 определяется возможностями, которые дает преобразователь ча- стоты. Из (8.7) следует, что максимальный диапазон достигается при 6 = 0, при этом \Som&x\=U2*=U2tnaj,/Ei. Механическую характеристику асинхронного двигателя двойного питания можно получить на основе (4.20). При этом имеем = l2Al ax/(W+/4)in-(2./)(cos8--(s/s,p)sin 8)1 (8.8) Ж = AfА [ 1 -iUiJs) (cos 8+tg ср,2 sin 6)1, (8.9) где Ма - момент для асинхронного двигателя, работающего при замкнутой накоротко обмотке ротора. 8.3. Асинхронные каскады При использовании асинхронной машины двойного питания можно электрическую энергию, выделяющуюся в цепи ротора при скольжении (энергию скольжения), посредством преобразовательной установки передавать обратно в питающую сеть переменного тока или к вспомогательному двигателю, сообщающему дополнительную механическую энергию валу основного асинхронного двигателя. Сочетание асинхронного двигателя с преобразовательной установкой и вспомогательным двигателем называют асинхронным каскадом. В настоящее время в асинхронных каскадах применяют главным образом полупроводниковые преобразователи, поэтому их часто называют вентильными каскадами. Применение асинхронных каскадов позволяет регулировать частоту вращения двигателей с фазным ротором без потерь энергии, которые имеют место при подключении к обмотке ротора реостата, что существенно повышает энергетические показатели электропривода. Вентильный каскад. В рассматриваемом каскаде (рис. 8.12) к ротору асинхронного двигателя 2 подключены два полупроводниковых преобразователя - 3 и 4, позволяющие регулировать частоту вращения электродвигателя вниз и вверх от синхронной частоты вращения. При регулировании от синхронной частоты вниз (s>0) преобразователь 4 работает в выпрямительном режиме, а преобразователь 3 -в инверторном. При этом электрическая мощность скольжения Ps от ротора асинхронного двигателя передается через преобразователь 4 на преобразователь 3, осуществляющий преобразование постоянного тока в переменный и возврат энергии скольжения в питающую сеть. При регулировании вверх от синхронной частоты (s<0) к ротору асинхронного двигателя через Рис. 8.12. Принципиальная схема вентильного каскада преобразователи 3 к4 подается из сети дополнительная электрическая энергия; при этом двигатель начинает работать с частотой выше синхронной. Регулирование частоты вращения в рассматриваемом каскаде осуществляется изменением режима работы преобразователя 3. Выходная мощность двигателя передается приводимому во вращение механизму /. При этом, пренебрегая потерями в двигателе и принимая Рэм~Ри получим, что мощность, передаваемая механизму /, (8.10) а развиваемый на ее валу вращающий момент при Pi = Рном = const М = P/Qi ~ Я, (1 - s)/12i (1 - s)I= const. (8.11) При использовании в схеме вентильного каскада неуправляемого преобразователя 4 напряжение, введенное в его цепь выпрямленного тока, всегда находится в фазе или в противофазе с током этой цепи. В соответствии с этим и первые гармоники тока и напряжения, действующие на стороне переменного тока преобразователя 4, также могут находиться в фазе или в противофазе. С учетом этого получаем векторную диаграмму (рис. 8.13), в которой векторы О2 и h представляют собой первые гармоники напряжения и тока, действующих в цепи обмотки ротора. Следовательно, когда при изменении нагрузки машины вектор Уг изменяется по фазе, то вектор U2 также поворачивается, автоматически следуя за Уг. Таким образом, вентильный каскад можно рассматривать как асинхронную машину двойного питания, на которую наложены ограничения в части возможного изменения угла 6. Этот угол является функцией тока /2, т. е. зависит от нагрузки машины (при условии, что угол коммутации вентилей преобразователя 4 принимаем неизменным). При выполнении преобразователя 4 управляемым угол сдвига фазы тока /2 от ЭДС Е2 определяется не только параметрами R2 и X2S роторной цепи, но и углом регулирования а вентилей преобразователя, так как при его изменении изменяется выпрямленное напряжение и ток /2 отстает от напряжения U2 на угол а. При замене тока /2 и напряжения U2 их первыми гармониками пренебрегаем действием высших гармоник тока ротора. Эти гармоники вызывают пульсации электромагнитного момента и биения тока статора. Однако при использовании в преобразователе 4 ши- 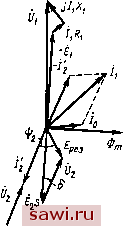 Рис. 8.13. Векторная диаграмма вентильного каскада роко применяемой трехфазной мостовой схемы включения вентилей искажение формы тока невелико; коэффициент искажения не превышает 0,955 для токов ротора и 0,98 для токов статора. Для цепи обмотки ротора можно записать: /2Z2=£2S + L2 {R2+JX2S) = E2S--U2S-K Приравнивая мнимые части (8.12а), получим /2 = £2 sin Ь/Х2. Мощность скольжения Pj=miE2/2S cos 8, (8.12) (8.12а) (8.13) (8.14) а электромагнитный момент = /(2iS) = /ni£2/2Cos8/2i. (8.15) С учетом (8.13) имеем M = miE2Sin 28/[22iA2l. (8.16) Для асинхронного двигателя, работающего в обычной схеме (т. е. без вентильного каскада), максимальный момент Л1таж = = miE2/{2QiX2). Поэтому (8.16) можно привести к виду М = =AfmazSin26 или, псреходя к относительным единицам, = /Af = /,sin28. (8.17) Максимальное значение момента соответствует углу 6 = 45° или скольженкю Sgp=Р2/Х2-{-Y2U2,. Частота вращения, при которой М = 0, соответствует скольжению So=f/2.. Следовательно, Зкр увеличивается по мере увеличения добавочного напряжения U2 в цепи ротора, вследствие чего уменьшается и жесткость механических характеристик. В действительности из-за несинусоидальности тока ротора перегрузочная способность асинхронного двигателя в схеме вентильного каскада при углах коммутации у преобразователя 4, меньших 60°, оказывается меньше, чем при работе двигателя с обмоткой ротора, замкнутой накоротко, на 4,5%, а при углах у> >60° -на 17%. На рис. 8.14 приведены механические характеристики вентильного каскада для асинхронного двигателя мощностью 280 кВт. В настоящее время асинхронные каскады используют главным образом в электроприводах с двигателями большой мощности при широком диапазоне регулирования частоты вращения. Электрический и электромеханический каскады. Находят применение каскадные схемы (рис. 8.15), в которых энергия скольжения через выпрямитель подводится к двигателю постоянного тока. в схеме электрического каскада (рис. 8.15, а) двигатель постоянного тока 4, получающий от асинхронного двигателя 2 через выпрямитель 5 энергию скольжения Ps, вращает генератор переменного тока 3, который возвращает эту энергию в сеть. Схема, изображенная на рис. 8.15, а, принципиально тождественна схеме рис. 8.12, но этот каскад имеет большую массу и уменьшенный коэффициент полезного действия из-за использования вращающихся машин. Рабочей машине / при принятых выше идеализированных условиях при постоянном моменте передается мощность 2= = Pi{l-s). В схеме электромеханического каскада (рис. 8.15, б) двигатель постоянного тока 4 жестко соединен с валом асинхронного двигателя 2 и поэтому энергия скольжения преобразуется в механическую. К рабочей машине / подается мощность Р2 + Р.~Л(1-5) + Л5Л. (8.18) которая при Pi = const остается постоянной на всех частотах. 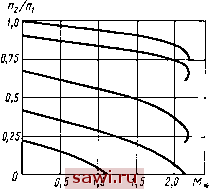 Рис. 8.14. Механические характеристики вентильного каскада при различных значениях 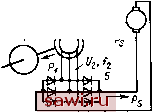 Рис. 8.15. Принципиальные схемы электрического (а) и электромеханического (б) каскадов асинхронного двигателя с машиной постоянного тока Недостатками каскадных схем с двигателями постойного тока являются относительно высокая стоимость коллекторных двигателей и сложность их эксплуатации. Каскадный двигатель. В ряде случаев условия эксплуатации не позволяют иметь не только коллекторные машины, но и двигатели с контактными кольцами (например, двигатели насосов артезианских скважин, нефтепроводов и т. п.). В этих случаях может быть применен каскадный двигатель (рис. 8.16, а), представляющий комбинацию двух двигателей с фазными роторами, которые насажены на один вал и имеют общий корпус. Питание к каскадному двигателю подводится через первый статор 4. Обмотки роторов / и 2 соединены между собой с перекрещиванием фаз, вследствие чего МДС роторов вращаются в противоположные стороны. Второй статор 3 подключают к выпрямителю 6 и инвертору 7, отдающим энергию скольжения Ps в сеть переменного тока. Вал двигателя соединяют с рабочей машиной 5. 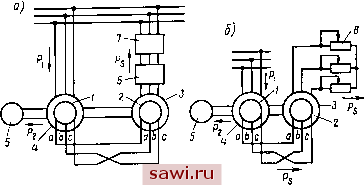 Рис. 8.16. Принципиальные схемы каскадного двигателя с вентильным каскадом (а) и реостатом в цепи второго статора (б) В простейшем случае (рис. 8.16, б) в обмотку второго статора 3 может быть включен трехфазный реостат 8. При этом механические характеристики бесконтактного каскадного двигателя аналогичны характеристикам асинхронного двигателя с фазным ротором. Электромагнитный момент каскадного двигателя определяется активной составляющей тока ротора, которая практически равна активной составляющей тока второго статора. Величина этого тока, как и в любом асинхронном двигателе, определяется скольжением S поля 022 второго ротора 2 относительно второго статора 3. Поскольку МДС и поле Ф22 второго ротора вращаются в сторону, обратную направлению вращения роторов 7 и 2 (рис. 8.17, а, б), скольжение определяется частотой их взаимного пересечения: 82={ПР, - П)1ПР (8.19) где пр-2 = 60/2 ? = 60/1X1 ? = niSi - частота вращения МДС второго ротора 2; fi и /2 - частоты изменения тока соответственно в первом статоре 4 и роторе /; rii и Si - частота вращения поля Фп первого статора 4 и скольжение ротора / относительно этого поля. Учитывая, что частота вращения ротора П2={1-Si)ni, (8.19) принимает вид S2=[niSi - 1 (I - s,)I/(/ZiSi)=(2si - l)/si. (8.20) Установим охранное оборудование. Тел. . Звоните! | ||||||||||||||