
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 При 5i<0,5 скольжение $2 является положительным и электромагнитный момент, действующий на роторы 7 и 2, совпадает с направлением вращения. Скольжению Si = 0,5 соответствует S2 = 0, т.е. через ротор проходит только намагничивающий ток и момент близок к нулю. При si>0,5 и S2<0 фаза активной составляющей тока меняется: машина переходит в генераторный режим, а электромагнитный момент становится тормозящим. При замкнутых накоротко обмотках второго статора механическая характеристика сходна с характеристикой асинхронного двигателя с коротко- 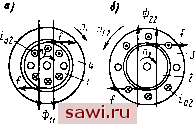 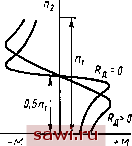 Рис. 8.17. Схемы, иллюстрирующие образование электромагнитного момента в каскадном двигателе: а - в первом двигателе при nj<ni, в - во втором двигателе при nj<njn Рис. 8.18. Механические характеристики каскадного двигателя замкнутым ротором, только переход в генераторный режим происходит при частоте, равной 0,5 П] (рис. 8.18). Включение реостата в цепь второго статора изменяет механические характеристики так же, как и в асинхронном двигателе с фазным ротором. Главным недостатком всех каскадных схем является увеличение потерь в двигателе, в связи с чем приходится увеличивать его габаритные размеры. Поэтому применение каскадных схем можно считать рациональным только на современном этапе, пока преобразователи частоты значительной мощности сравнительно дороги и имеют недостаточно высокую надежность. Вопросы для самоконтроля 1. Как осуществляется возбуждение автономного асинхронного генератора? 2. Как регулируют частоту и иаприжеиие автономного асинхронного генератора? 3. Как регулируют активную и реактивную мощности в машине двойного питания? 4. Как изменяют частоту вращения в машине двойного питаики? 5. Для какой цели применяют асинхронные каскады? 6. Чем отличаются друг от друга вентильные, электрические и электромеханические каскады?  Специальные асинхронные машины Наряду с асинхронными двигателями и генераторами в ряде отраслей техники применяют специальные асинхронные машины. К ним относятся асинхронные преобразователи частоты, фазорегуляторы, индукционные регуляторы напряжения, вращающиеся трансформаторы, сельсины, линейные и дуговые двигатели. С помощью этих машин можно регулировать частоту, фазу и величину напряжения; преобразовывать угол поворота ротора в напряжение, пропорциональное этому углу или некоторым его функциям; обеспечивать синхронный и синфазный повороты или вращение двух или нескольких осей, механически не связанных между собой; осуществлять линейное или дуговое перемещение механических объектов. 9.1. Асинхронный преобразователь частоты Асинхронная машина с фазным ротором может служить преобразователем частоты, так как частота тока в ее роторе /2 = /l5 = /( l ± 2)/60. (9.1) При этом знак - соответствует вращению ротора в направлении вращения поля, а знак <и + - против вращения поля. Асинхронный преобразователь частоты (рис. 9.1) состоит из асинхронной машины АМ с фазным ротором и соединенного с ней приводного двигателя D с регулируемой частотой вращения. Одна из обмоток АМ (например, обмотка статора) подключается к трехфазной сети с частотой fu от другой обмотки ([ротора) получают переменный ток с частотой f2=f\S. Для получения частоты f2>f\ ротор асинхронной машины приводят во вращение в направлении, противоположном вращению 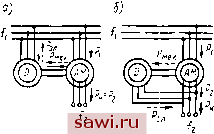 Рис. 9.1. Схемы асинхронного преобразователя частоты при подключении приводного двигателя к сети (а) и к выходу преобразователя частоты (б) ПОЛЯ. При этом преобразователь частоты работает в режиме электромагнитного торможения при s>l, а двигатель передает ему мощность Рмех. Направления первичной Pi и вторичной Рг мощностей преобразователя частоты, механической Рмех и электрической Рэл мощностей приводного двигателя и мощности Рн, подаваемой на нагрузку, для рассматриваемого режима показаны на рис. 9.1, а сплошными стрелками. Для получения частоты 2< <.fi преобразователь частоты должен работать в режиме двигателя и вращаться в направлении вращения поля. При этом он тормозится электромагнитным моментом машины D работающей в генераторном режиме. Эта машина отдает электрическую энергию в ту же сеть, от которой питается преобразователь частоты AM (рис. 9.1, а), или в цепь ее ротора (рис. 9.1, б). Направления мощностей Рмех, Рэл И Рн ДЛЯ рассматривземого режима показаны на рис. 9.1 штриховыми стрелками. 1СЛИ приводным двигателем служит асинхронная машина, то частота выходного напряжения /2=[(/Дв + Рам)/,1/Рдв, (9.2) где Рам и рдв-числа пар полюсов машин AM и Д. При этом знаки -f и - относятся соответственно к режиму работы преобразователя частоты AM электромагнитным тормозом {f2>fi) и двигателем {f2<fi). Если в качестве приводного двигателя используют асинхронную машину, то приближенное значение частоты /г (при условии пренебрежения скольжением машины D определяется по (9.2). Если пренебречь потерями мощности в машине D (считать, что Рэл= ==Рмех), а также потерями мощности АРэл1 и ДРм в статоре в машине AM (считать, что Pi = Рэм), то при включении машин по схеме, приведенной на рис. 9.1, а, Р = Р2= Л5; Я ех = (1 - S) я, = к 1 - s)ls\Р ; при включении по схеме, приведенной на рис. 9.1, б, Р., = Я2 + Я = Л; Я = (1 5)Я, = (1-5)Я . Для плавного регулирования частоты /г необходимо регулировать частоту вращения приводного двигателя D, например, используя двигатель постоянного тока. 9.2. Фазорегуляторы и индукционные регуляторы напряжения Асинхронная машина при заторможенном роторе может быть использована в режиме работы трансформатора с целью регулирования величины и фазы напряжения. 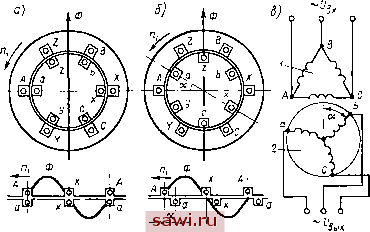 Рис. 9.2. Схематический разрез (а. б) и схема (в) фазорегулятора: 1 - обмотка статора, 2 - обмотка ротора Фазорегулятор. Если ротор трехфазной асинхронной машины с фазным ротором установлен в положении (рис. 9.2, а), при котором оси одноименных фаз ротора и статора совпадают, то вращающийся магнитный поток пересекает обмотки статора и ротора одновременно. Следовательно, ЭДС Ei и Е2 имеют одинаковую фазу. Если ротор повернуть навстречу магнитному потоку на угол а (рис. 9.2, б), то магнитный поток сначала набегает на фазу а-х ротора, а потом на одноименную фазу А-X статора. Вследствие этого ЭДС £2 опережает Ei по фазе на угол а. Поворачивая ротор в ту или иную сторону, можно получить требуемую фазу ЭДС: е - =£2mSin (сй<±а). Асинхронные фазорегуляторы (рис. 9.2, в) используют главным образом в схемах автоматики для компенсации фазовой погрешности, в управляемых выпрямителях, при испытании электроизмерительных приборов и пр. Промышленность выпускает миниатюрные фазорегуляторы с одной обмоткой на роторе. Поворот ротора осуществляют при помощи червячного редуктора с самоторможением. Индукционный регулятор напряжения. Этот регулятор выполняют в виде трехфазного поворотного автотрансформатора. Его ис- пользуют для регулирования трехфазного переменного напряжения, подаваемого на какие-либо устройства. Схема индукционного регулятора (рис. 9.3, а) аналогична схеме трехфазного автотрансформатора. В качестве первичной обмотки обычно используют обмотку ротора /; вторичной служит обмотка статора 2. Входное напряжение Овх подводится к началам а, b и с первичной, а также к началам А, В н С вторичной обмоток, выходное напряжение f/вых снимается с концов X, Y и Z вторичной обмотки. При подключении индукционного регулятора к сети трехфазного тока в каждой фазе его обмоток ротора и статора индуцируются ЭДС £] и Е2 (рис. 9.3, б). При холостом ходе для каждой фазы этой машины 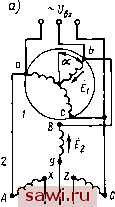 (9.3;
где LfBx=tfi £i. Из (9.3) следует, что векторы Свх и £2 складываются геометрически и поэтому действующее значение выходного напряжения зависит от угла сдвига фаз а между векторами [7вх  Рис. 9.3. Схема (а) и векторная диаграмма {б) напряжений трехфазного индукционного регулятора Рис. 9.4. Схема fa) и векторная диаграмма напряжений (б) сдвоенного трехфазного иидукциоииого регулятора: 1, 3 - обмотки статора; 2, 4 - обмотки ротора И Ez. Этот угол можно изменять, поворачивая ротор, и получать таким образом различные величины выходного напряжения f/вых. Достоинством индукционного регулятора является возможность плавного изменения выходного напряжения под нагрузкой без разрыва цепи тока. При этом ток ротора, взаимодействуя с магнитным полем, создает электромагнитный момент, стремящийся повернуть ротор, поэтому необходимо принять меры для торможения ротора. В индукционных регуляторах малой мощности для поворота ротора применяют штурвал с червячной передачей, передача обеспечивает и самоторможение ротора. В рассматриваемом индукционном регуляторе одновременно с изменением величины выходного напряжения изменяется и его фаза. Если такое изменение нежелательно, то применяют сдвоенный регулятор, у которого оба ротора расположены на общем валу. Обмотки ротора обоих регуляторов соединены между собой параллельно, а обмотки статора - последовательно (рис. 9.4, а), причем фазы этих обмоток подключены к сети с выходным напряжением 11ъх так, чтобы направление вращения магнитного поля в двух регуляторах было противоположным. В этом случае суммарный вращающий момент на валу сдвоенного регулятора равен нулю и регулятору не требуется специального тормозного устройства. При повороте сдвоенного ротора ротор одного из регуляторов поворачивается по направлению вращения поля, а ротор другого - против направления поля. Поэтому векторы вторичных ЭДС £21 и £22 поворачиваются в противоположных направлениях и при холостом ходе: (9.4) bux = bx + Al + : При этом фаза напряжения Оых, как видно из векторной диаграммы (рис. 9.4, б), остается неизменной. Индукционные регуляторы строятся на мощность до 500 кВт. 9.3. Вращающиеся трансформаторы Назначение. Вращающимися трансформаторами называют электрические микромашины переменного тока, преобразующие угол поворота ротора 9 в напряжение, пропорциональное этому углу или некоторым его функциям. Эти машины широко применяют в автоматических и вычислительных устройствах, предназначенных для решения геометрических и тригонометрических задач, выполнения различных математических операций, построения треугольников, преобразования координат, разложения векторов и пр. В системах автоматического регулирования их используют в качестве измерителей рассогласования, фиксирующих отклонение системы от некоторого заданного положения. Устройство. Вращающийся трансформатор (рис. 9.5) выполняют так же, как асинхронный двигатель с фазным ротором. На статоре и роторе размещают по две одинаковые однофазные распределенные обмотки, сдвинутые между собой в пространстве на 90°. Магнитопровод изготовляют из листов электротехнической стали или пермаллоя, изолированных друг от друга. Вращающийся трансформатор может работать в режиме поворота или в режиме вращения. При работе в режиме поворота положение ротора относительно статора задается поворотным меха-низом (исполнительным двигателем с редуктором). При этом одну из обмоток статора - обмотку возбуждения В (рис. 9.6) - присоединяют к сети переменного тока, а другую -компенсационную обмотку К - подключают к некоторому сопротивлению или Установим охранное оборудование. Тел. . Звоните! |