
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 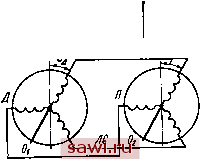 Питание к обмотке возбуждения подается посредством кольцевого трансформатора, смонтированного в общем корпусе с сельсином. Такой сельсин по своей конструкции подобен контактному сельсину, но вместо колец и щеток в нем применен кольцевой трансформатор. Первичная обмотка трансформатора расположена на статоре, вторичная - на роторе. Магнитопровод состоит из торцовых колец, собранных из листов электротехнической стали, и внешнего и внутреннего колец, выполненных из металлокерамики. Режимы работы. Различают два основных режима работы сельсинов: индикаторный и транс- 3~~? форматорный. При индикаторном режиме ротор сельсина-приемни- L J в/, ка соединяют непосредственно с ведомой осью. Его применяют при малом значении статического момента на ведомой оси, обычно когда на ней укреплена хорошо уравновешенная стрелка индикатора. Поэтому для поворота ротора приемника вслед за поворотом ротора датчика требуется небольшой вращающий момент, который можно получить от самого сельсина-приемника без дополнительных усилительных устройств. При работе сельсинов в рассматриваемом режиме обмотки возбуждения В датчика Д и приемника Я включены в общую сеть переменного тока (рис. 9.12), а обмотки синхронизации соединены между собой линией связи ЛС. Пульсирующие магнитные потоки, создаваемые обмотками возбуждения датчика и приемника, индуцируют в трех фазах обмоток синхронизации ЭДС. Если между роторами датчика и приемника имеется некоторый угол рассогласования 9, то по обмоткам синхронизации протекают токи, которые, взаимодействуя с потоком возбуждения, создают в датчике и приемнике синхронизирующие моменты. Эти моменты имеют противоположные направления и стремятся свести угол рассогласования к нулю. Обычно ротор датчика заторможен, поэтому его синхронизирующий момент воспринимается механизмом, поворачивающим ведущую ось Оь синхронизирующий момент приемника поворачивает ротор в ту же сторону и на тот же угол, на который поворачивается ротор датчика. Трансформаторный режим применяют, когда к ведомой оси приложен значительный статический момент, т. е. когда приходится поворачивать какой-либо механизм. При этом сигнал о наличии рассогласования между положениями роторов датчика и приемника подается через усилитель на исполнительный двигатель, Рис. 9.12. Схема включения сельсинов прн работе в индикаторном режиме поворачивающий ведомую ось и ротор сельсина-приемника, ликвидируя рассогласование. При работе сельсинов в трансформаторном режиме обмотка возбуждения В сельсина-датчика Д (рис. 9.13), механически связанного с ведущей осью 0\, подключается к сети однофазного тока, а обмотка возбуждения сельсина-приемника Я - к усилителю У, подающему питание на обмотку управления исполнительного двигателя ИД. Обмотки синхронизации обоих сельсинов соединены между собой линией связи ЛС. 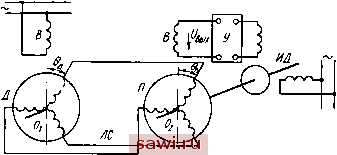 Рис. 9.13. Схема включения сельсинов при работе в трансформаторном режиме Переменный ток, проходящий по обмотке возбуждения датчика, создает в нем пульсирующий магнитный поток, который индуцирует ЭДС в трех фазах обмотки синхронизации. Так как обмотки синхронизации датчика и приемника соединены между собой линией связи, то по ним протекает ток, вследствие чего в приемнике создается свой пульсирующий магнитный поток. Если возникает рассогласование положений роторов датчика и приемника, то этот поток индуцирует в обмотке возбуждения некоторую ЭДС и на зажимах ее появляется выходное напряжение L/вых. Это напряжение через усилитель У подается на обмотку управления исполнительного двигателя ИД, который поворачивает ведомую ось Ог совместно с ротором приемника. Когда рассогласование ликвидируется, выходное напряжение станет равным нулю и вращение ведомой оси прекратится. 9.5. Линейный и дуговой асинхронные двигатели В линейном асинхронном двигателе (рис. 9.14, а) зубчатый статор / развернут в плоскость и в пазах его помещена трехфазная обмотка 2. Подвижная часть линейного двигателя, называемая бегуном, может иметь конструкцию, подобную ротору обычной асинхронной машины, но также развернутому в плоскость. Она может иметь сердечник 4 из листовой электротехнической стали и обмот- ку 3 типа беличьей клетки, расположенную в пазах этого сердечника, или же быть выполнена в виде плоской полосы из ферромагнитного (сталь) или немагнитного проводящего материала (медь. 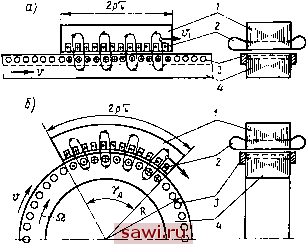 Рис. 9.14. Электромагнитные схемы линейного (а) и дугового (б) асинхронных двигателей алюминий). Линейный асинхронный двигатель можно также выполнить в виде двух статоров, обращенных друг к другу, между которыми перемещается проводящее тело. Для высокоскоростного наземного транспорта применяют линейные двигатели, в которых 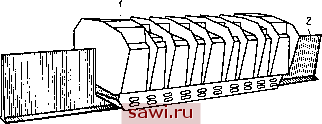 Рис. 9.15. Общий вид линейного асинхронного двигателя статор 1 (рис. 9.15) размещен на движущемся экипаже, а проводящее тело в виде шины 2 установлено на железнодорожном пути. Принцип действия линейного двигателя подобен принципу действия асинхронного двигателя нормального исполнения. Трехфазная обмотка статора создает бегущее магнитное поле, которое индуцирует в короткозамкнутой обмотке бегуна ЭДС. В результате  взаимодействия тока в обмотке бегуна и магнитного поля возникают электромагнитные силы, приводящие бегун в движение. Скольжение в линейном асинхронном двигателе: s= (1-2)/], где У] = 2t/i- линейная скорость бегуще.-о поля; У2 -линейная скорость перемещения подвижной части; т-полюсное деление. При номинальном режиме скольжение икеет примерно такие же значения, как и в асинхронных двигателях нормального исполнения, т. е. скорость Уч. перемещения подвижной части близка к У. В линейном асинхронном двигателе возникают краевые эффекты, обусловленные тем, что его статор не замкнут в кольцо и имеет конечную длину. В результате этого кроме основного магнитного бегущего поля возникает пульсирующее поле, которое можно представить в виде прямого и обратного бегущих полей. Обратное поле создает паразитные тормозные силы, вызывает неравномерное распределение тока в фазах обмотки статора, искажение распределения магнитного поля в воздушном зазоре, дополнительные потери мощности в статоре и бегуне. Поэтому энергетические и тяговые показатели линейных двигателей хуже, чем у асинхронных двигателей нормального исполнения. Особенно низкие энергетические показатели получаются при большом воздушном зазоре между статором и ротором. Например, в линейном двигателе, предназначенном для транспортных устройств, из-за большого воздушного зазора (20... 50 мм) резко возрастает ток холостого хода; при этом cos ф1 0,4... 0,5 и т] = 0,6... 0,7, а энергетический фактор Сэ=т] cos ф1 0,25...0,35. В настоящее время линейные асинхронные двигатели используют для привода в движение экипажей высокоскоростного наземного транспорта на магнитном подвесе тележек подъемных кранов, заслонок и других линейно движущихся объектов. При использовании такого двигателя на высокоскоростном наземном транспорте (рис. 9.16, а) статор 2 с обмоткой 3 устанавливают на движущемся экипаже 1, а ротором служит стальная полоса 5, расположенная на железнодорожном пути 4 между рельсами. Возникающая Рнс. 9.16. Схемы установки линейных двигателей на движущемся экипаже {а) и на тележке подъемного крана {б) продольная сила перемещает экипаж по рельсовому пути, а вызванная краевыми эффектами поперечная сила Fa способствует магнитному подвешиванию экипажа. При использовании двигателя в приводе тележки подъемного крана (рис. 9.16, б) статор 2 с обмоткой 3 устанавливают на тележке 5, а ротором служит стальная полоса 4, укрепленная на балке 6, по которой перемещается тележка. В некоторых случаях линейные двигатели применяют в приводах металлообрабатывающих станков, для получения возвратно-поступательного перемещения элементов станка путем периодического изменения чередования фаз обмотки статора двигателя. Однако при этом возникают довольно значительные потери мощности из-за того, что часть кинетической энергии подвижного элемента станка бесполезно теряется в каждом цикле ускорения и замедления. Кроме того, существенно увеличивается общая масса этого элемента за счет сочлененного с ней бегуна линейного двигателя. Дуговой двигатель (рис. 9.14, б) по принципу действия подобен линейному, но его статор / выполнен в виде дугового сектора с центральным углом, а ротор 4 -в виде полого цилиндра. На статоре и роторе расположены соответствующие обмотки 2 и 3. Статор дугового двигателя создает бегущее магнитное поле, перемещающееся в пределах угла а с линейной скоростью V\ = 2xf\ = aRfi/p, где т=а/?/(2р) - полюсное деление. При этом синхронная угловая скорость Qi=V\/R = afi/p оказывается в 2п/а раз меньшей, чем при статоре обычного типа, занимающего полную окружность. Соответственно меньшей будет и угловая скорость ротора Q2=Qi(I-s). В дуговом двигателе, так же как и у линейных, возникают краевые эффекты, существенно ухудшающие их энергетические показатели. Вопросы для самоконтроля 1. Как устроен и работает асинхронный преобразователь частоты? 2. Для каких целей служат фазорегуляторы и индукционные регуляторы напряжения? 3. Как устроен и работает вращающийся трансформатор? 4. В каких режимах могут работать сельсины? б. Как устроены бесконтактные сельсины? 6. Как устроен и работает линейный асинхронный двигатель?  Принципы оптимального проектирования серий асинхронных двигателей При создании асинхронных двигателей общего назначения целесообразно проектировать их в виде серии, состоящей из ряда машин различной мощности и различной частоты вращения. В этом случае можно обеспечить стандартизацию и унификацию их деталей, лучшее использование активных и конструктивных частей, снижение трудоемкости и материалоемкости, повышение энергетических показателей и эксплуатационных свойств. При оптимальном проектировании современных серий двигателей в основу положен критерий минимума приведенных суммарных затрат на производство и эксплуатацию двигателей. При установлении геометрических размеров и основных параметров проектируемых двигателей используют математические методы нелинейного программирования. 10.1. Постановка задачи Впервые задача определения оптимальных размеров электрических машин была поставлена в трудах М. Видмара, В. А. Трапезникова и И. М. Постникова, которые стремились увязать выбор геометрических размеров машины с обеспечением минимальной ее стоимости. В дальнейшем в связи с усовершенствованием ЭВМ и развитием математических методов нелинейного программирования оказалось возможным определять оптимальные соотношения электромагнитных нагрузок и геометрических размеров, обеспечивающие наилучшие результаты, например наименьшие суммарные затраты на изготовление и эксплуатацию электрических машин. В разработку теории оптимального проектирования и практику внедрения единых серий асинхронных двигателей большой вклад внесли советские ученые А. Г. Иосифьян, Б. И. Кузнецов, Э. Д. Кравчик, Э. К. Стрельбицкий, Т. Г. Сорокер, И. Н. Чарахчян и др. Установим охранное оборудование. Тел. . Звоните! |