
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 Обычно серия асинхронных двигателей состоит из нескольких участков, в пределах которых значение kaP2 примерно постоянно. Для таких участков справедливо выражение Ig *НР2= (Ig 2 ax - Ig Я2 , )/(гр - 1), ( 10.15) где Ргтах и Ргпип - наибольшая и наименьшая мощности данного участка; 2р -число ступеней на данном участке. Кроме шкалы номинальных мощностей при проектировании серии асинхронных двигателей определенное значение имеет шкала подводимой мощности, от которой зависят основные размеры машины. Отношение мощностей Р\ и Рг (кВ-А) определяется выражением: PilP2=lK-4Cosi)=l+(Ap + C)P2\ (10.16) где р -число пар полюсов; А, В я С-постоянные, зависящие от энергетических показателей данной серии. При этом коэффициент подводимой мощности Ри 1 4-(р 4-С) яг/ Для современных серий асинхронных двигателей Л 0,14; В 0,4 (разброс значений В в пределах 0,3 ...0,5 практически не влияет на величину ksPi); С= 0,4... 0,45. Установочные размеры. Основным установочным размером серии асинхронных двигателей является высота оси вращения Н. Другие установочные размеры жестко связаны с высотой оси вращения. Высота оси вращения определяет возможность выполнения электрической машины с некоторым максимальным зна1ением наружного диаметра сердечника статора Dai, от которого зависят объем активной части машины Daih и ее расчетная мощность Р\, а следовательно, и полезная мощность P2=PiT]. Связь между расчетной мощностью машины и главными размерами ее активной части можно выразить уравнением (10.18) где - коэффициент использования активной части машины; /] - ее длина; а - показатель степени, характеризующий изменение линейной нагрузки Ai обмотки статора и индукции В в воздушном зазоре при изменении диаметра Dai. В современных высокоисполь-зованных двигателях со степенью защиты IP44 и IP54 значение а=0,3, а в двигателях со степенью защиты IP23 достигает 0,8. Коэффициент использования активной части для данной серии асинхронных двигателей при заданном числе полюсов и способе охлаждения определяется выражением Я2 (10.19) 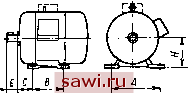 Рис. 10.3. Основные установочные размеры асинхронных двигателей с креплением иа лапах где kE=E\IU\; kD=Dn/Dai; D.i - внутренний диаметр сердечника статора. При заданной высоте Н мощность Pj, как следует из (10.18) и (10.19), уменьшается по мере увеличения числа полюсов 2р. При увеличении длины станины (которая определяет длину сердечника) и длины сердечника li мощность Рг также возрастает. Рекомендации Международной электротехнической комиссии (МЭК) по рядам основных установочных размеров Н, А, В, С (рис. 10.3) электродвигателей с установкой на лапах приведены в табл. 10.2. Увязка стандартизированных шкал мощностей и высот вращения производится таким образом, что каждому значению номинальной мощности двигателя в зависимости от его исполнения по степени защиты и частоты вращения соответствует определенная высота оси вращения Н. На каждой высоте оси вращения Н могут выполняться машины различной мощности, отличающиеся длиной станины (размер В); им присвоены обозначения: 5 - короткая, М -средняя и L - длинная. Машины с Ж90 обычно выполняются при одной длине станины, но с различной длиной сердечника статора; им присвоены обозначения Л и В. В СССР при проектировании двигателей серии 4А был принят ряд из 17 высот оси вращения от 50 до 355 мм. При проектировании двигателей серии АИ была введена дополнительная высота вращения 45 мм, чтобы унифицировать большое число асинхронных двигателей общепромышленного применения малой мощности, выпускаемых в настоящее время. Унифицированная серия высоковольтных асинхронных двигателей напряжением 6000 В выполнена на трех высотах осей вращения 355, 400 я 450 мм. В нее вошли двигатели с короткозамкнутыми и фазными роторами мощностью от 200 до 1000 кВт. Современные тенденции к снижению материалоемкости машин и обеспечению ббльшей их компактности привели к тому, что в СССР при переходе от одной серии электродвигателей к другой (АО - 1950 г.; АО-2 - 1960 г.; 4А- 1970 г.) происходило существенное повышение мощности двигателя Рг при данной высоте Н и уменьшение объема его сердечника статора Dai/i (рис. 10.4). Частоты вращения. Асинхронные двигатели основного исполнения изготовляют с числом полюсов 2, 4, 6 и 8, т. е. они рассчитаны на частоту вращения магнитного поля 3000, 1500, 1000 и 750об/мин. Обычно двигатели с 2р=6 предусматривают при ЯбЗ мм, а с 2р=8 -при Я71 мм. Серия может также включать в себя дви-гатели с числом полюсов 10 и 12 (т. е. с частотой вращения поля 600 и 500 об/мин), но они предусматриваются обычно для участков серии с высотой оси вращения Я>200 мм. Многоскоростные модификации двигателей выполняют на 2, 3 и 4 частоты вращения в пределах от 500 до 3000 об/мин. Таблица 10.2
Частота вращения двигателей с короткозамкнутым ротором при питаний их от тиристорных преобразователей частоты должна устойчиво регулироваться вниз от номинальной в пределах 1: 10. При этом закон регулирования напряжения должен обеспечивать работу при 0=const во всем диапазоне регулирования. Нагрузка двигателя при пониженной частоте вращения должна быть уменьшена для ограничения допустимых превышений температуры в результате ухудшения условий охлаждения. Так, например, для современных двигателей со степенью защиты 1Р54 (1Р44) допустимую мощность Ргдоп продолжительного режима можно установить по эмпирической формуле 2лоп 2ном = [(/-1,75К/;)/(50-1,75К/,)].{(;, + 7,2)/(/, + 8,6)1. (10.20) При регулировании частоты от 50 до 5 Гц КПД снижается от номинального значения 0,85... 0,91 до значения 0,4...0,5, а скольжение возрастает от 2... 9 до 15...20%. Несинусоидаль- вь,/ н,им ность выходного напряже- ш - ния тиристорного преоб- з,/7 т-разователя частоты понижает КПД двигателей при /=50 Гц в среднем на 2...4%, а со5ф1 -на 0,05. В двигателях с фазным ротором при уменьшении частоты вращения вниз от номинальной, путем включения реостата в цепь ротора, нагрузка при независимой вентиляции может оставаться номинальной во всем диапазоне регулирования. При самовентиляции допустимая нагрузка Мдоп должна быть не выше следующих значений: 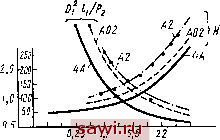 Рис. 10.4. Зависимости мощности асинхронных двигателей от высоты оси вращения для различных отечественных серий 1.0 1.0 0,9 0,96 0,8 0,91 0,7 0,85 0.6 0,80 0,5 0,72 0,4 0,62 Напряжение и частота сети. Асинхронные двигатели на напряжение до 1000 В проектируются на стандартные номинальные напряжения и частоты, принятые для советских и западноевропейских сетей, т. е. на напряжения 220-380-660 В и частоту 50 Гц. В ряде случаев в серии предусматривают также двигатели на частоту 60 Гц и другие напряжения, выпускаемые по особому заказу. Серии высоковольтных двигателей проектируются на 6000 и 10 000 В. По действующим публикациям МЭК 34-1 и стандарту СЭВ 1346-78 двигатели должны нормально работать с номинальной мощностью при отклонениях от номинального значения питающего напряжения в пределах ±5% и частоты - ±2,5%. В случае продолжительной работы двигателя при крайних значениях напряжения допускается увеличение превышения температуры обмотки на 10 К. При одновременном отклонении напряжения и частоты от номинальных значений двигатель должен сохранять номинальную мощность, если сумма абсолютных процентных значений этих отклонений не превосходит 5%. Двигатели должны питаться практи- чески синусоидальным напряжением (мгновенное значение его при номинальной нагрузке не должно отличаться по амплитуде от соответствующего значения первой гармонической более чем на 5%), а трехфазная система напряжений должна быть практически симметричной (составляющая напряжения обратной последовательности не должна превышать длительно 1% и кратковременно 1,5% составляющей прямой последовательности; нулевая составляющая- 1% от напряжения прямой последовательности). Степени защиты и способ охлаждения. При проектировании серии асинхронных двигателей 4А для основного исполнения были приняты две степени защиты IP44 (закрытое исполнение с наружным обдувом от вентилятора, расположенного на валу двигателя) и IP23 (защищенное исполнение с самовентиляцией). При разработке серии АИ с целью повышения защищаемости двигателей от попадания в них посторонних твердых тел для основного исполнения вместо IP44 была принята степень IP54. Для некоторых модификаций двигателей, работающих в пыльных и влажных помещениях, предусмотрена степень защиты IP56. Унифицированная серия высоковольтных двигателей выполняется со степенью защиты IP23 и IP44. Степень защиты в значительной мере определяет конструкцию оболочки двигателя, т. е. его общее конструктивное исполнение. Возможность прямого охлаждения активных частей двигателя создает ряд преимуществ у защищенных двигателей по сравнению с закрытыми. Эти преимущества особенно сказываются в машинах больших габаритов. При больших высотах оси вращения защищенные двигатели по стоимости и массогабаритным показателям лучше закрытых. С понижением высоты оси вращения разница в показателях этих двигателей уменьшается и при граничных значениях защищенные и закрытые двигатели становятся близкими по стоимости, массе и габаритам. Для серии АИ установлено, что нижняя граница целесообразного применения двигателей защищенного исполнения по высоте оси вращения - 200 мм при всех числах пар полюсов. Кроме указанных преимуществ электродвигатели со степенью защиты IP23 имеют лучшие виброакустические характеристики, особенно это проявляется при использовании двусторонней радиальной симметричной системы вентиляции с обдувом спинки пакета статора. Электротехническая сталь. При проектировании серии асинхронных двигателей исходными параметрами электротехнической стали являются кривая намагничивания (она характеризуется индукцией Szsoo при напряженности магнитного поля 2500 А/м) и удельные потери - Pi.s/so при индукции 1,5 Тл и частоте перемагни-чивания 50 Гц. Существует связь между степенью легирования стали кремнием и ее магнитными свойствами. С увеличением степени легирования уменьшаются удельные потери pi,s/5o, но в то же время и уменьшается способность к намагничиванию, выражаемая индукцией В2500. Проведенными исследованиями установлено, что при пе-242 реходе от малых мощностей к большим отношение потерь в стали к суммарным потерям в двигателе при номинальной нагрузке постепенно возрастает. Поэтому в двигателях небольшой мощности целесообразно применять сталь с лучшей способностью к намагничиванию и несколько большими потерями pus/so, а в двигателях ббльшей мощности использовать сталь с меньшим значением Pi.s/so- Выбор марки стали оказывает влияние на следующие показатели: суммарные затраты Зт, производственную себестоимость двигателя Сдв, длину сердечника /], массу обмоточного провода Шпп и КПД при номинальной нагрузке. Для количественной оценки этого влияния используют коэффициенты влияния, представляющие собой приращение функции на 1%, вызванное изменением данного параметра на 1%. Коэффициенты влияния параметров В2500 и Pi.s/so на указанные выше показатели, полученные в результате проведенных исследований на ЭВМ, приведены в [13]. Там же приведены коэффициенты влияния параметров е и кз,п, зависящие от нагревостойкости и толщины изоляции проводников обмотки статора. Обмоточные провода и система изоляции. При выборе системы изоляции обмотки статора, ротора (при фазном роторе) и обмоточных проводов основными исходными параметрами при проектировании являются нагревостойкость изоляции и ее толщина. Первая определяет значение допускаемого превышения температуры бм, вторая - коэффициент заполнения паза медью кз.п (отношение суммарного сечения всех проводников в пазу к полной площади паза). От нагревостойкости системы изоляции в значительной мере зависят допустимые электромагнитные нагрузки, т. е. значения линейной нагрузки Ai и индукции Вс, в воздушном зазоре. Влияние электромагнитных нагрузок на мощность и объем активной части машины можно установить из (10.18) и (10.19). Повышение Ль Be и кз.п приводит к увеличению коэффициента использования /г активной части машины, которое может быть реализовано увеличением мощности машины или же уменьшением ее размеров и массы. Если принять линейную зависимость между допускаемым превышением температуры 9м обмотки статора и потерями в ней ДРэл i (что обосновано рядом исследований), то относительное изменение коэффициента использования при увеличении допускаемого превышения температуры от 9м до 9м можно выразить в виде А>и = /(9м-9м.о)/(ем-9м.о). (10.21) где 9м.о - превышение температуры обмотки, соответствующее потерям холостого хода. На основании проведенных оптимизационных расчетов двигателей с высотой оси вращения 180 ...225 мм установлено, что переход с изоляции класса нагревостойкости Е на изоляцию класса F за Установим охранное оборудование. Тел. . Звоните! | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||