
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Асинхронный двигатель и асинхронные машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 контактах на кольцах, которые обычно включаются в потери АРэлг. Оставшаяся часть мощности Рж превращается в механическую мощность Магнитные потери АРиг в роторе из-за малой частоты перемаг-ничивания практически отсутствуют. За вычетом незначительных потерь на трение ЛРмех (механических) и добавочных потерь АРд механическая мощность двигателя отдается нагрузке и является выходной полезной мощностью Р2 = Рме.-Ри..-Ру (3.12) Выразим электромагнитную и механическую мощности через электромагнитный вращающий момент М: Яsм=lЛ; (3.13) (3.13а) где Qi=2nrti/60 и Q2=2nrt2/60 - угловые скорости магнитного поля и ротора. Из энергетической диаграммы (рис. 3.3, а) следует, что Рал2 - Рэи Рн ех > Рал2= (l - 22)=AlQt (Qi - 22)/2, =MQiS. Из формулы (3.14) имеем УИ=ДЯзУ(215); (3.14) (3.15) (3.16) Полученные формулы (3.15) и (3.16) позволяют произвести анализ важнейших свойств асинхронного двигателя, а именно: установить связь между скольжением и коэффициентом полезного действия, а также зависимость электромагнитного момента от параметров машины и режима ее работы. Электромагиитиый момент асиихронной машины. Формулу (3.15), полученную из энергетической диаграммы, преобразуем к более удобному для анализа виду, подставив в нее значения Qi = =2nfi/p и Д/зл2= г2/2£2вС05г32, где \32 - угол сдвига фаз между ЭДС и током ротора. При этом с учетом (3.10) получим MipniiWk/V) Фт/2С05Ф2 = СдФ /2С05ф2, (3.17) где См=рт2т2коб2/У2 - постоянная. Формула (3.17) справедлива не только для асинхронных машин, но и для электрических машин всех типов. Во всех этих ма-52 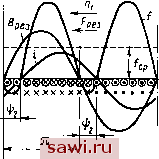 шинах электромагнитный момент пропорционален произведению магнитного потока на активную составляющую тока ротора. Поясним физический смысл этой формулы на примере асинхронного двигателя с короткозамкнутым ротором. На рис. 3.4 изображена развертка ротора, где кружками показаны поперечные сечения его проводников. Вращающийся магнитный поток (кривая 5рез), пересекая проводники обмотки ротора, индуцирует в них переменную синусоидальную ЭДС, мгновенное значение которой е=Врез1и. Следовательно, кривая распределения индукции 5рез вдоль окружности ротора представляет собой в другом масштабе кривую распределения мгновенных значений ЭДС е в проводниках. Направление этих ЭДС, определенное по правилу правой руки, показано крестиками и точками ниже сечений проводников. Мгновенное значение тока в проводниках также изображается синусоидой, сдвинутой относительно кривой ЭДС е на угол \32. Направление тока в них отмечено крестиками и точками внутри поперечного сечения проводников. Ток ротора, взаимодействуя с магнитным потоком, вызывает появление электромагнитных сил. При этом на каждый проводник действует усилие f=Bli. Распределение этих усилий по проводникам представлено кривой f. Легко заметить, что к проводникам, лежащим на дуге, соответствующей углу я-r32, приложены силы, увлекающие ротор за вращающимся магнитным потоком, а на дуге, соответствующей углу г32,- тормозящие силы. Поэтому при неизменной величине тока /г величина результирующего усилия Fpe3, а следовательно, и вращающий момент М будут тем меньше, чем больше угол г32. При 1)2=я/2 момент Л1=0, так как на половину проводников действует усилие, направленное в одну сторону, а на другую половину - такое же усилие, направленное в противоположную сторону. Формула (3.17) позволяет связать величину момента с физическими явлениями, происходящими в двигателе. Ею удобно пользоваться при качественном анализе поведения двигателя в различных режимах. Недостаток формулы (3.17) заключается в том, что входящие в нее величины (Фм, /2COsi32) не связаны непосредственно с напряжением сети и режимом работы машины, а их экспериментальное определение довольно сложно. Поэтому ниже выводится другая формула для электромагнитного момента, позволяющая более просто определять его величину и влияние на него различных параметров машины и эксплуатационных режимов. Рис. 3.4. Кривые распределения индукции, тока и электромагнитных сил, действующих на проводники асинхронной машины 3.3. Схема замещения асинхронной машины Определение токов, потерь мощности и падений напряжения в асинхронном двигателе осложняется тем, что в обмотке вращающегося ротора проходит ток, действующее значение и частота которого зависят от частоты вращения. Ток ротора iE2JZ= EJYr\+XI . (3.18) Поскольку ротор вращается, из (3.9) и (3.10а) следует, что ЭДС Е2а в обмотке ротора и ее частота /г пропорциональны скольжению S. Следовательно, и индуктивное сопротивление обмотки ротора зависит от скольжения: X2=2nf2L2=2nfiL2S=X2S, (3.19) где - индуктивное сопротивление обмотки заторможенного ротора, L2 -ее индуктивность. 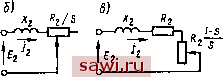 Рис. 3.5. Схемы замещения ротора асинхронной машины Подставляя значения E2s и X2s в (3.18), получим /2 = E2S M+?Xl. (3.20) На рис. 3.5, а показана электрическая схема замещения ротора, соответствующая уравнению (3.20). Так как в числителе и знаменателе (3.20) есть переменная величина s, преобразуем (3.20) к виду /2==EJ\/iRJsf-{-Xl (3.20а) Уравнению (3.20а) соответствует электрическая схема замещения, изображенная на рис. 3.5, б. Здесь ЭДС Е2 и индуктивное сопротивление Х2 неизменны, а активное сопротивление R2/S меняется в зависимости от скольжения. Основные параметры этой схемы (индуктивное Х2 и активное R2 сопротивления) такие же, как и в схеме замещения для заторможенного ротора. Следует подчеркнуть, что схемы, представленные на рис. 3.5, а, б, с энергетической точки зрения не эквивалентны. Так, в схеме, приведенной на рис. 3.5, а, электрическая мощность равна электрическим потерям в контуре: Мощность, потребляемая в схеме, приведенной на рис. 3.5, б, Pf=m2l2R2ls. Отношение этих мощностей PrJPv=mjlRA (m2flR2)/s] = Однако так как 8=АРзл21Рэы, получим, что Рр = Рз тельно, электрическая мощность, . Рр в схеме, представленной на рис. 3.5, б, равна всей электромагнитной мощности, подводимой от статора к ротору. По известным величинам АРэл2 и Рам легко определить и механическую мощность ротора: мех = Рэ - Дэ 2= m2AR2s --m/lR=m2/lR20-s)/s. (3.21) Полученный результат наглядно представлен электрической схемой, изображенной на рис. 3.5, в, в которой активное сопротивление обмотки ротора разбито на две части: R2 и R2{l-s)/s. Первое сопротивление не зависит от режима работы, и потери в нем равны электрическим потерям реального ротора. Второе сопротивление зависит от скольжения, и мощность, выделяющаяся в нем, численно равна механической мощности двигателя Рех- Таким образом, рассматриваемая схема замещения позволяет заменить реальный вращающийся ротор неподвижным, в цепь обмотки которого включено активное сопротивление, зависящее от частоты вращения ротора. По этим причинам указанное дополнительное сопротивление 2(1-s)/s в литературе иногда обозначают Rmbx. Полная схема замещения асинхронного двигателя (рис. 3.6, а) отличается от схемы замещения асинхронной машины с заторможенным ротором только наличием чисто активного сопротивления нагрузки, зависящего от скольжения. Следовательно, и в этом случае удается свести теорию асинхронной машины к теории трансформатора. 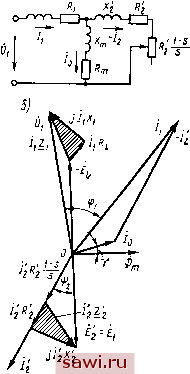 Рнс. 3.6. Т-образная схема замещения асинхронной машины (а) и ее векторная диаграмма (б) Схему замещения (рис. 3.6, а) называют Т-образной. Ей соответствуют следующие уравнения. Уравнение напряжений для контура обмотки статора: Уравнение напряжений для контура обмотки ротора: = /2X2 + KRs=/2Z2 + /2R2 (I - 5)/5. Уравнение токов /l = /o + (-/2). (3.22) (3.23) (3.24) По своей структуре эта система полностью аналогична системе уравнений для трансформатора, ко вторичной обмотке которого подключено сопротивление Яма= = R2{1-s)/s. При этом ток /г можно рассматривать как нагрузочную составляющую тока /]. Количественное различие между схемами замещения асинхронного двигателя и трансформатора обусловлено значительно большим током холостого хода асинхронного двигателя. Если в теории трансформатора часто можно пренебречь намагничивающим контуром, то при рассмотрении работы асинхронного двигателя этого сделать нельзя, так как ошибка может получиться значительной. Для наиболее распространенных в промышленности асинхронных двигателей мощностью 3... 100 кВт параметры схемы замещения в относительных единицах, т. е. в долях базисного сопротивления обмотки статора Zi6= = ihom ihom, имеют следующие значения: Xm*=Xm/Zi6=2,5...4; . А2. = 0,07 ... 0,15; /?i. /?2.= = 0,01 ...0,07; Rm = 0,l ...0,4 (меньшие значения относятся к двигателям меньшей мощности). Векторная диаграмма для Т-образной схемы замещения приведена на рис. 3.6, б. Из системы уравнений (3.22) ... (3.24) можно получить следующие значения токов в обмотках статора и ротора: 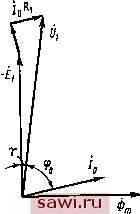 Рис. 3.7. Векторная диаграмма асинхронной машины при идеальном холостом ходе /1 = z z2,/(z -i-z,) z,z+2,z; +z z;, (3.25) -n=h-L=iy 1±1 , (3.26) ГДе21 = /?1Ч-Д1; Zra = Rm+}Xm\ Z2s=R2lS+iX2. Уравнения (3.25) и (3.26) можно преобразовать, положив (Zm+Zi)/Zm=Ci. При этом получим: Л=-М±?кЯ: (3.27) z, + c,z -7;=i/i/(Zi+c,z;). (3,28) Появившемуся при этом преобразовании комплексному коэффициенту Ci можно дать следующую физическую интерпретацию. JL.C.X, CjRj Сг СЫ А 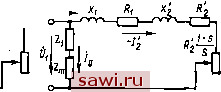 Рис. 3.8. Г-образные схемы замещения асинхронной машины При идеальном холостом ходе /2=0 и /i = /o. Следовательно, t7i=/o(Zi4-Zm); -£i=/oZm, откуда t/i/(-£ ,) = (Zi + Z )/Z =Ci= 1+ I--;;2 . v2 J 4 + х (3.29) В асинхронных машинах обычно XmRm и R\Xm.>XiRm, вследствие чего мнимая часть j{RiXm-XiRm)/{Ri + Xm) комплекса Ci отрицательна. Поэтому в показательной форме Ci=Cie-J\ (3.30) Таким образом, модуль Ci коэффициента Ci представляет собой отношение напряжения Ui к ЭДС Ей индуцируемой в обмотке статора при идеальном холостом ходе, а аргумент arctg {{RiXm-XiR )/[X {Xi + Xm)]} - угол между векторами Oi и -El (рис. 3.7). В практических расчетах аргумент у часто определяют по приближенной формуле sin 2у2fJUr. (3.31) Рассмотрение теории работы асинхронной машины можно упростить, преобразовав Т-образную схему замещения в Г-образ- Установим охранное оборудование. Тел. . Звоните! |