
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Электрические машины 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 ПВ = 100%, где tp, - время работы при i-й нагрузке внутри рабочего цикла Гц; приведенные к ближайшему стандартному значению ПБст = 15, 25, 40, 60% эквивалентные значения экПВст экПВст
(6.14) При выборе двигателя должны соблюдаться условия Лэк ПБст ном ПБст ПВст ном ПВст (6.15) где М о пВст номПВст - номинальные значения момента и мощности двигателя, соответствующие ПВст. Выбранный двигатель должен также проверяться по условиям (6.12). В ряде случаев при больших значениях ПВ ( > 70 80 %) возможен выбор двигателя, предназначенного для режима S1, для которого следует принять ПВ = 100%. При этом выражения (6.14) преобразуются соответственно в (6.6) и (6.8). При идентичных циклах с постоянной нагрузкой внутри рабочего периода формулы (6.14) сводятся к виду МзкПВе,-1/пВ/ПВ ; экПВ = 1/ПВ/ПВе,. Выбор двигателя для работы в режимах S4-S8. Для электроприводов, работающих в режимах S4 и S5, выбираются двигатели, предназначенные для режима S3. Выбор в этом случае затрудняется тем, что предварительно точная нагрузочная диаграмма для этих режимов не может быть рассчитана, так как заметную долю потерь составляют потери в переходных процессах. Последние же могут быть рассчитаны только после выбора двигателя. На практике поступают следующим образом: по диаграмме статических нагрузок определяют эквивалентные приведенные момент или мощность, как и для режима S3. При выборе двигателя по каталогу вводят коэффициент запаса, учитывающий дополнительные потери в переходных процессах. Для выбранного двигателя строят уточненную нагрузочную диаграмму, по которой осуществляют поверочный расчет. Сравнение производят с каталожными данными для двигателя режима S3. Часто при выборе двигателя для указанных режимов возникает вопрос о допустимой частоте включений асинхронного двигателя с короткозамкнутым ротором. В этом случае выполняется поверочный расчет для определения допустимой частоты включения (точнее, числа рабочих циклов) в час: 2доп = 3600/Гц. (6.16) Для двигателей режима 81 доп определяется по формуле = 36 ПВ(1:Р е - + РоЕРнсм(100 - ПВ) ( Енсм - (tn + tr) +W +W, (6.17) здесь ПВ - относительная продолжительность включения, определяемая для режимов . S4 и S5 по ГОСТ 183-74; X ном - суммарные потери в двигателе, соответствующие его номинальному режиму; суммар- ные потери при работе двигателя с установившейся скоростью, определяемые статической нагрузкой; - коэффициент ухудшения теплоотдачи неподвижного двигателя (£0 = 0); tn, tr - время пуска и торможения электропривода; W , - энергия потерь в двигателе за периоды пуска и торможения. В режиме S4 в (6.17) следует принять = О и 1 = 0. Для двигателей режима S3 номинальная частота включений z om = 6(Гц ом = Ю мин). В этом случае - номПВс- (6.18) где ЕномПБст мощность тепловых потерь, соответствующая номинальному режиму при стандартном значении ПВс, ближайшем к расчетному значению ПВ для режимов S4 или S5; tp j, -время работы электропривода с установившейся скоростью. Для некоторых двигателей, допускающих ббльшую частоту включений, в каталогах приводятся значения Zhom- В этом случае для режима S4 можно принять доп ном , , , где 7дв, Jj; - соответственно момент инерции двигателя и суммарный момент инерции электропривода; kj - коэффициент инерции. Выбор двигателя для работы в режимах S6 и S7. Для работы в режимах S6 и S7 обычно выбираются двигатели, работающие в режиме S1. Расчет эквивалентных величин в этом случае выполняется по (6.6) и (6.8). Для режима S6 по этим формулам может быть осуществлен выбор двигателя, тогда как для режима S7 они используются для проверки выбранного двигателя, так как для этого режима расчет и построение достаточно точной нагрузочной диаграммы до выбора двигателя невозможны. Для обоих указанных режимов обязательна проверка по условиям (6.12). Выбор двигателя для работы в режиме S8. При работе элект ропривода в. режиме S8, как правило, выбираются двигатели режима S1. В этом случае предварительно расчет мощности двигателя может быть выполнен по (6.6) или (6.8). При выборе его мощности следует ввести коэффициент запаса, учитывающий специфику регулирования скорости электропривода, ухудшение условий охлаждения при снижении скорости, динамические нагрузки при переходе от одной ступени скорости к другой. После выбора двигателя строится уточненная нагрузочная диаграмма, для которой по (6.4) или (6.6) находятся эквивалентные за цикл значения тока или момента. Частным случаем режима S6 является режим ударной нагрузки, когда момент статической нагрузки резко увеличивается, а затем снижается до момента холостого хода. К механизмам указанного типа могут быть отнесены ковочные машины, прессы, некоторые прокатные станы, поршневые насосы, компрессоры и т. п. Обычно в электроприводах, работающих с ударной нагрузкой, на валу двигателя устанавливается дополнительный маховик, который берет на себя часть нагрузки при резком ее возрастании. Происходит это вследствие снижения скорости электропривода во время пика нагрузки, благодаря чему часть кинетической энергии, запасенной маховиком, передается на вал электропривода. В период снижения нагрузки, когда скорость электропривода возрастает, запас кинетической энергии маховика вновь возрастает; двигатель при этом несет нагрузку большую, чем момент сопротивления холостого хода Мсо- Во всех случаях обший принцип совместного выбора двигателя и маховика для механизмов с ударным характером нагрузки заключается в том, что кинетическая энергия 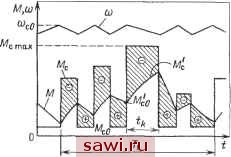 Рис. 6.1. График ударной нагрузки двигателя с маховиком маховика к началу нового цикла должна оставаться неизменной, а скорость двигателя - постоянной и равной сОсо- В процессе прохождения пиков нагрузки во время цикла маховик отдает энергию на вал (на рис. 6.1 соответствует площади заштрихованных участков со знаком - ), а в период холостого хода, т. е. с увеличением скорости, запасает ее (площадь заштрихованных участков со знаком + )- Энергия, отданная маховиком за цикл, должна быть равна энергии, вновь накопленной маховиком. Если это условие не соблюдается, то в последующие периоды начальная скорость цикла не будет оставаться постоянной, двигатель при этом будет перегружен либо выбран завышенной мошности. Один из наиболее простых методов совместного предварительного выбора двигателя и маховика заключается в том, что из всего рабочего цикла рассматривается лишь наиболее тяжелый период нагрузки двигателя. На рис. 6.1 он определяется временем Указанный период характеризуется максимальным статическим моментом М, моментом, который развивает двигатель в конце периода, Мс и начальным моментом двигателя Мсо- Для упрощения предварительных расчетов обычно полагают Для приведенного графика, считая, что при Мс двигатель должен работать с максимальной перегрузкой, можно записать = М, = М, (1 - е-1) + Меос--/ , где М, од. - максимальный электромагнитный момент двигателя; 7. - электромеханическая постоянная времени, = J/p = = JscooShom/Mhom- Найдем момент инерции электропривода: 0 ном In (6.19) Момент инерции маховика находится из выражения где 7мех - приведенный к валу двигателя момент инерции механизма. После соответствующего механического расчета маховика необходимо провести проверку правильности выбора двигателя и маховика, для чего строят графики момента и скорости за цикл, аналогичные приведенным на рис. 6.1. Критерием правильности выбора служат условия где Мщч ц, Мко ,ш ю а, ц, С0ко ,ц-соответственно значения момента и скорости в начале и конце цикла. Для предварительно выбранного двигателя строится нагрузочная диаграмма и производится его проверка по (6.6) или (6.8). Из (6.19) следует, что момент И1герции маховика может быть снижен при увеличении скольжения двигателя s (,,. Этим положением часто пользуются, выбирая соответственно двигатели с повышенным скольжением. Возможно и еще одно техническое решение вопроса о повышении скольжения двигателя: при прохождении участков с резким возрастанием нагрузки в роторную цепь двигателя вводится дополнительный резистор, что увеличивает скольжение. На участках с малой нагрузкой резистор выводится, и двигатель работает е малым скольжением и высокой скоростью. Процесс регулирования сопротивления роторной цепи выполняется регуляторами скольжения. Выбор двигателя для работы в режиме кратковремеииой нагрузки с малой продолжительностью рабочего цикла. При пуске асинхронного двигателя до 90 - 95% суммарных потерь вьщеляется в обмотках, и эти потери идут в основном на увеличение теплосодержания обмоток, что позволяет рассматривать нагрев статора и ротора отдельно без учета их взаимного влияния. При длительности рабочей части периода по крайней мере до 10 с можно считать, что нагрев обмоток является процессом адиабатическим, что позволяет исключить из рассмотрения расчет потерь в сердечниках. Поэтому исходная система неоднородных дифференциальных уравнений, характеризующая тепловой баланс в двигателе, может быть существенно упрошена и сведена к виду (6.20) где С], Сг - полные теплоемкости статорной и роторной обмоток, Дж/°С; Р,! W, Рэ2 (t) - электрические потери в этих обмотках во время рабочего цикла, Вт. Из (6.20) получают превышение температуры к концу цикла работы под нагрузкой в виде A9i = P,i(t)dt; А92 = P,2{t)dt. (6.21) Электрические потери в обмотках РзЦ2){1) определяют из системы дифференциальных уравнений двигателя для электромеханического переходного процесса. Превышение температуры, полученное по (6.21), сравнивается с допустимой для изоляции обмотки статора и ротора. Условие правильности выбора двигателя А91<А9доп1; АЭ2=5А9доп2- (6.22), Кроме того, двигатель должен быть проверен по условию (6.12). Выбор двигателя для работы в режиме частых реверсов. Критерием правильности выбора является вьшолнение условия (6.22). При этом превышения температуры должны рассчитываться с учетом конструктивного исполнения машины. Оценка ее теплового состояния может быть сделана по той же методике, что и для режима S1, только потери при реверсах должны определяться в функции мгновенных потерь как среднее интегральное значение за цикл работы. Мгновенные потери определяются через мгновенные значения токов и магнитных индукции, полученные из решения нелинейной системы дифференциальных уравнений, описывающих переходные электромеханические процессы в асинхронном двигателе. Необходимость такого подхода объясняется сложными несинусоидальными законами изменения во времени переменных при реверсах. Пренебрежение апериодическими составляющими токов и магнитных потоков приводит к очень большим погрешностям при определении суммарных потерь при переходных процессах. Так, при периодах переключений примерно 0,4 с эта погрешность Установим охранное оборудование. Тел. . Звоните! |