
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Кинематика жидкости 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 преобразовании правая (левая) система координат переходит в правую (левую), то различия в формулах преобразования тензоров и псевдотензоров нет (А= 1). Поэтому когда в рассмотрении имеют дело только с правой системой координат, псевдотензоры часто называют просто тензорами. Приведем примеры псевдотензоров. 1. Векторное произведение векторов а и b меняет знак на обратный прн переходе от правой системы к левой (и наоборот), т. е. с = аХЬ - псевдотензор первого ранга (псевдовектор). 2. Угловая скорость вращения твердого тела является псевдовектором. 3. Псевдотензор Леви - Чивита - псевдотензор третьего ранга D = = lldkim II. антисимметричный по всем парам индексов и удовлетворяющий условию d[23 = 1 в какой-либо правой системе координат. Все его компоненты, имеющие два одинаковых индекса, равны нулю, н тензор имеет только шесть компонент, у которых все три индекса различны. Составляющие dikl(iфkфl) принимают значение, равное единице, если (, k, I - четная перестановка тройки (I, 2, 3), и равное -1, если i, k, I - перестановка нечетная. Таким образом, d\23 - 231 = 312 =1. 132 = = 321 = -1- Во всех правых системах координат псевдотензор Леви -Чивита имеет один и тот же вид. 6. Умножение псевдотензоров и тензоров. Произведение псевдотензора на псевдотензор является тензором (так как = 1). Если А и 5 - псевдотензоры рангов т и п, то А-В - тензор ранга т-\-п. Произведение тензора на псевдотензор является псевдотензором. Если А-тензор ранга т, В - псевдотензор ранга п, то А-В - псевдотензор ранга т -\- п. Рассмотрим примеры. 1. Возьмем псевдотензор Леви - Чивита D = \\dkim\\ и тензор второго ранга, образованный из векторов а и b (диаду): С = II Ср, II = 11 арб, 11. Перемножив псевдотензор D на тензор С, получим псевдотензор пятого ранга T = \\dklmapbq\\. Выполним два раза операцию свертывания по индексам I п р п индексам т н q. При двухкратном свертывании ранг псевдотензора понизится на четыре и получим псевдотензор первого ранга (псевдовектор R). Положим l = p = i, m. = q = j. Тогда . = Zl, 21. ЛЛ 1.2.3). Используя значения dkij, получаем Ri = 1230263 + 1321362 = 263 - 362, R2 = o-zbi - й\Ьз, Rs = a\b2 - 0261- Из выражений для проекций видно, что R = а X Ь, т. е. R -векторное произведение векторов а и Ь. 2. Если псевдотензор Леви - Чпвита D умножить на тензор второго да, где ai - составляющие вектора а, то получим псевдотензор пя- ранга 24 того ранга. Если этот тензор dimn \ свернуть диа раза по индексам i н п и индексам и т, то получим псевдотензор первого ранга. Это будет rota. 7. Примечание. В теории аффинных ортогональных тензоров использовались прямолинейные ортогональные координаты и их преобразование опять в прямолинейные ортогональные координаты. Эти линейные ортогональные преобразования определялись таблицей направляющих косинусов. Можно рассматривать и неортогональные линейные преобразования. Пусть преобразование координат определяется формулой Тогда для инвариантной функции ф(г) получим Эф Y3 dKj , дх дх\ ~ Lik=\ dl* Вообще говоря, матрицы g и g\ не обязательно совпадают (совпадение имеет место для ортогональных преобразований), поэтому законы преобразования компонент градиента скалярной функции и компонент вектора г различны. В связи с этим в общей теории тензоров оказывается необходимым различать два вида векторов и тензоров - контравариантные и ковариант-ные. Не приводя полного определения, дадим часто употребляемое. Говорят, что контравариантный вектор - это такой вектор, компоненты которого Л,- преобразуются при переходе к другой системе координат, как компоненты вектора г. Аналогично величины Ai определяют ковариантный вектор, если при переходе от одной системы координат к другой эти компоненты преобразуются как компоненты градиента функции, т. е. как частные производные по координатам. Для аффинных ортогональных векторов понятия ковариантного и контравариантного векторов являются совпадающими. В общей теории тензоров рассматриваются не только неортогональные, но и нелинейные преобразования координат. § 8. СКОРОСТИ И ПЕРЕМЕЩЕНИЯ ТОЧЕК БЕСКОНЕЧНО МАЛОГО ОБЪЕМА СПЛОШНОЙ СРЕДЫ Пусть в пространстве, связанном с системой координат х, у, Z, движется жидкость. Рассмотрим некоторую малую частицу жидкости с объемом т в момент времени t. Выберем в этом объеме некоторую точку А и примем ее за полюс (рис. 1). Обозначим ее радиус-вектор через Го- Выберем в этом же объеме другую точку В и обозначим ее радиус-вектор через г. Относительный радиус-вектор АВ обозначим через р, его проекции - через I, ц, t,. Если координаты точки А обозначить через х, у, г, то координаты точки В будут х-\- I, у + ц, г + ь- Рассмотрим ту же массу жидкости в момент t4-dt. Точки А и В займут новое положение А и В. Радиус-векторы, соответствующие новому положению точек, обозначим через г, г, р. Очевидно, что Р = г-Го, р==г-г; (8.1) Вектор dp = р - р с проекциями dl, dx], dt, характеризует изменение относительного положения точки В по отношению к точке А за время dt. С учетом (8.1) dp = р р = (г - г) - (г - г ) = (г - г) - (г; - г ). (8.2) Если через v.4 и vb обозначить скорости точек Л и В, то Гц - Гц = Л - перемещение точки Л, г- г = Vg Л - перемещение точки В за время dt. Поэтому (8.2) можно записать в виде р = (Уд-Ул)Л. (8.3) Здесь Vb = V (г) = V (х+г, у+ц, Z+0, = V (го) = V (х, у, г). (8.4) Считая рассматриваемый объем т малым, разложим Рис.1. функцию v(.-f I, г/+ Ti,z--S) в окрестности точки х, у, г в ряд Тейлора. С точностью до величин второго порядка малости получим 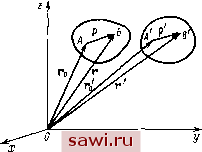 dp = .дх ду В проекциях на оси координат , dv , дч (.Т (8.5) L дх 1 + 1 + dx dy dz dvu dv Z dt, dt, dt. (8.50 Чтобы выяснить характер относительного изменения положений точек Л и В, преобразуем равенства (8.5). Сделаем это Установим охранное оборудование. Тел. . Звоните! |