
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Проектирование конструкций 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 Предположим также, что каждая компонента Р\ вектора усилий {F} производит работу UFAi на перемещении Д, а ее работа вдоль любой другой компоненты перемещения равна нулю. Если выполняются указанные условия, т. е. условия справедливы при действии сил ортогональных направлениях, то такие векторы сил и перемещений называются сопряженными векторами. Обе системы векторов {А}, {F} и {А}, {Р} выбираются сопряженными. Чтобы величина работы оставалась инвариантной при заданном преобразовании, необходимо выполнение равенства LFJ{}= = L F J {А}, откуда с учетом (2.25) имеем L F J [Г1{А}= L F J {А}, следовательно, [ РJ [Г]= Р J , или после транспонирования [Г1Т{Р}={Р}, (2.27) где символом (-) обозначена совокупность сил, полученная в результате преобразования {Р}. Откуда вытекает, что преобразование перемещений (2.25) подразумевает преобразование сил согласно (2.27). Преобразования сил и перемещений называются контраградиентными, если оговорены условия сопряженности. Если преобразование сил задано, то матрица преобразования перемещений получается в результате транспонирования сил. Принцип контраградиентности очень важен в том случае, когда преобразования перемещений (или сил) легко находятся, исходя из физического смысла, а преобразование сопряженного вектора осуществить нелегко. Это имеет место, например, если уменьшение числа степеней свободы осуществляют путем процедуры преобразования, описанной в разд. 2.8. ]3,ля уяснения следствий проведенных выше рассмотрений, касающихся соотношений жесткости элемента, удобно иметь дело с введенными в разд. 2.4 величинами энергии деформации и внешней работы. Потребуем снова, чтобы величина работы оставалась инвариантной при заданном преобразовании. Выполняя непосредственную подстановку (2.25) в (2.4а) и (2.4), получим = [к] {А} = [ГГ [к][Г] {\\ = Ц[к] {А}. (2.4с) Г = -Ц11{Р} = Ц 1[Г]{Р} = кА{Р}. (2.4d) Следовательно, преобразованная матрица жесткости, отмеченная знаком {), дается выражением [kl=imkl[ri. (2.28) Вектор сил, естественно, преобразуется согласно (2.27). Задаваемое соотношением (2.27) преобразование [к] в [к] имеет вид конгруэнтного преобразования. Таким образом, если [к1 - симметричная матрица, то и преобразованная матрица [к] должна быть симметричной. Если осуществляется преобразование для ортогональных осей координат, то указанные формулы можно получить более непосредственно, проведя, однако, несколько больше выкладок. Предположим, что преобразование компонент перемещения задается в результате непосредственного рассмотрения соотношений, связываю- Рис. 2.12. щих векторы смещений {Л} и {Л}. Вместо того чтобы принять соотношение (2.27) в качестве преобразования векторов сил, предположим, что это преобразование задается независимо, в результате непосредственного рассмотрения соотношения, связывающего векторы сил {F} и {F}. Запишем указанное преобразование в виде {F}=[ri{F}. (2.29) Поэтому, подставляя (2.25) и (2.29) в (2.26), получим [k][r]{A}=[r]{F} [r]-i[k][r]{A}={F}. (2.30) Преобразование координат в случае ортогональных координатных осей обладает свойством [Г][Г1г=1], где \W - единичная матрица, т. е. диагональная матрица, все элементы которой равны единице. Так как, по определению обратной матрицы, [Г][Г]~1=[1], то [Г]т=[Г]-1. (2.31) Если матрица обладает свойством (2.31), т. е. ее транспонированная матрица равна ее обратной матрице, то такая матрица называется ортогональной. Подставив (2.31) в (2.30), приходим к определению [к], данному в (2.28). Предположим, к примеру, что матрицу жесткости для плоского элемента, заданную в системе координат х и у, показанной на рис. 2.12, требуется задать в системе координат л: и у. Для векторов, отнесенных к произвольной точке р элемента, имеем преобразование cos ф 1ыр\ Г zo% ътЛЫЛ [иЛ [ -з1пф созф]\w / --it/ созф -sin ф sin ф cos ф Поэтому, если весь элемент содержит л/2 узлов (т. е. в рассматриваемом плоском случае п степеней свободы), искомая матрица преобразования всего элемента имеет вид Г[Гх] [Г] = (символом г J обозначается диагональная матрица). Так как не требуется обращать матрицу преобразований, а нужно лищь транспонировать ее, то можно определить неквадратные матрицы преобразования координатных осей. Матрица жест- 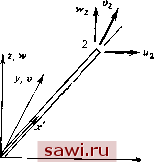 ~х, и Рис. 2.13. кости стержневого элемента (разд. 2.3) характеризует два осевых смещения. Этот элементе глобальной системе координат (рис. 2.13) описывается шестью компонентами смещений. Обозначая направляющие косинусы осей элемента в системе координат х, у и z через Ixx, Ix-y и т. д., представим преобразование координатных осей Установим охранное оборудование. Тел. . Звоните! |