
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Проектирование конструкций 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 и поэтому матрица [А] содержит только единичные ненулевые элементы. Развиваемый здесь на базе естественных рассуждений метод конгруэнтных преобразований можно также построить, используя энергетический принцип. Этот альтернативный подход излагается в разд. 7.2. Будет показано, что указанный альтернативный подход позволяет выявить особенности расчета всей конструкции без построения на практике глобальных матриц. Этот подход известен как процесс прямой минимизации энергии 13.6]. Прежде чем подвести итог данного раздела, рассмотрим некоторые важные свойства статической матрицы системы 1] (и, конечно, транспонированной матрицы - кинематической матрицы системы [А]). Это позволит выявить любую возможную форму кинематической неустойчивости конечно-элементной модели конструкции и определить дополнительные силы. Конструкция кинематически неустойчива, если при приложении рТГл впзн{сдрт формы движения как~абсолютно твердого тела. Дополнительные силы - это силы, переопределяющие статически определимую систему. Чтобы описать действия, которые необходимо проделать над уравнениями статики для определения указанных выше величин, рассмотрим конечно-элементную модель плоской фермы, содержащую п степеней свободы (так как каждому узлу соответствует две степени свободы, то число узлов равно /г/2), р элементов и t опорных реакций. Обобщение на более сложные случаи не представляет труда. Построим сначала вектор сил {F} таким образом, чтобы он содержал внутренние силы в элементах (т. е. составляющие, отвечающие движению тела как жесткого целого, исключаются), а также силы реакции опоры для всей конструкции. Этих сил достаточно, чтобы описать условия равновесия для единственного набора внешних нагрузок {Р}. Тогда для описания этих условий опять применимо уравнение (3.15). Перепишем (3.15) в следующем виде: [:-П{р} = 0. (3.15а) Матрицу 1В\-\] назовем дополнительной матрицей. Так как она составлена с учетом двух уравнений равновесия в каждом из п/2 узлов, то в ней п строк. Для р усилий в элементах и t реакций опор вектор {F} содержит (p+t) компонент, а для статически неопределимой конструкции это число превосходит п. Разность г= = {p+t)-n соответствует числу дополнительных сил. Основной задачей при выявлении дополнительных сил и (или) кинематической неустойчивости является выделение г компонент вектора {F}. Эти компоненты {F} и есть дополнительные силы (силы, статически переопределяющие систему). Далее выражаем оставшиеся ста- {F } через дополнительные силы {F} и {Р}. Это можно осуществить, применяя тически определимые силы прикладываемые нагрузки процедуру исключения Гаусса - Жордана. Применение процедуры исключения Гаусса - Жордана для матрицы [В\-II заключается в следующем: 1. Все элементы первой строки дополнительной матрицы делятся на коэффициент, стоящий в первом столбце. (Если в первом столбце стоит нулевой элемент, то необходимо предварительно соответствующим образом поменять местами столбцы.) 2. После деления каждый элемент первой строки умножается на коэффициент, стоящий в первом столбце второй строки, и полученные значения вычитаются из соответствующих элементов второй строки. В результате получим модифицированную вторую строку, у которой в первом столбце стоит нулевой элемент. Аналогичные операции проделываются со всеми остальными строками, что приводит к обнулению всех элементов, кроме первого, стоящих в первом столбце. 3. Операции, выполняемые на шагах 1 и 2, повторяют для второго столбца, добиваясь обнуления всех элементов столбца, кроме элемента, стоящего на главной диагонали матрицы, значение которого получается равным единице. Эту операцию повторяют для каждого из столбцов, образуя в итоге единичную [11 матрицу порядка пХп. В соответствии с изложенным выше уравнение (3.15а) преобразуется к виду откуда [1 С, 1С,] {F } = -[Q]{P} = 0, (3.15b) (3.15с) Наконец, преобразуем это выражение таким образом, чтобы получить в левой части равенства ({F}= F* FJ) {F} = [D,]{PK[,]{F}, (3.15d) г-с, ...... Относительно изложенной процедуры сначала заметим, что соответствующие {F°} столбцы матрицы не обязательно должны быть первыми п столбцами исходной матрицы [fi;-1]. Поэтому выявление дополнительных сил можно осуществить при достаточно произвольном начальном выборе столбцов матрицы. Желательно до нормализации главного диагонального элемента отыскать столбец с наилучшим значением коэффициента в соответствующей строке. Найденный столбец следует поменять местами с вектором, занимающим исходный столбец, а затем выполнить нормализацию И другие операции (шаг 2). Существует ряд соображений относительно критерия выбора наилучшего коэффициента в строке. Простейшим из них является выбор столбца с наибольшим значением коэффициента. Второе замечание, касающееся вышеизложенной процедуры, заключается в том, что кинематическая неустойчивость конечно-элементной модели выявляетея по наличию нулевых строк, причем их число соответствует числу степеней свободы указанной неустойчивости. С помощью процедуры исключения Гаусса - Жордана формируются диагональные матрицы. Напомним, что, согласно разд., 2.9, в матрице жесткости элемента можно выявить степени свободы, отвечающие движению тела как твердого целого, если преобразовать матрицу жесткости к диагональному виду и выделить ее нулевые диагональные элементы. В настоящем рассмотрении ненулевые элементы диагональной матрицы состоят из коэффициентов всех независимых уравнений. На рис. 3.7 иллюстрируются операции по определению кинематической неустойчивости простой фермовой конструкции с помощью вышеизложенной процедуры. 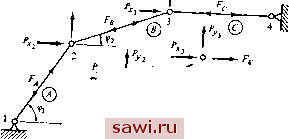 о FB ltumR S1/3/те 3 Рис. 3.7. Выявление кинематической неустойчивости с помощью процедуры исключения Гаусса-Жордана в уравнениях равновесия для узлов. Чтобы упростить алгебраические выкладки, из расчета исключаются опорные точки 1 и 4, при этом уравнения равновесия в узлах 2 и 3 имеют следующий вид (Са=соь Фз, S2=sin фг и т. д.):
Установим охранное оборудование. Тел. . Звоните! |