
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Проектирование конструкций 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 3.5.3. Связанная система координат Иногда бывает необходимо записать часть глобальных уравнений в связанной системе координат, особенно в тех случаях, когда условия закрепления задаются вдоль направлений, отличных от направления осей глобальной системы координат, или когда оболочка рассчитывается с помощью плоских пластинчатых элементов.   PuHmueHaRjjtoffTi, npi/жина -X, и 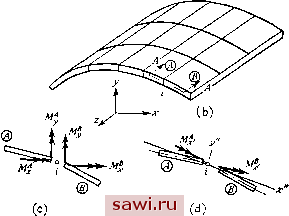 Рис. 3.15. Локальные координаты в конечно-элементном анализе, (а) Закрепление, ограничивающее вращение, и оси координат; (Ь) конечно-элементное представление оболочечной конструкции; (с) векторы мо.чентов в глобальной системе координат; (d) векторы моментов в локальной системе координат. Типичная ситуация представлена на рис. 3.15(a). Смещение точки i описывается компонентами смещения и; и Uj в глобальной системе. Однако простое приравнивание нулю одной или обеих компонент не будет правильно представлять связь, накладываемую условиями закрепления в направлении у . Связи можно задавать корректно, если выразить поведение точки i в терминах компонент смещений lii и vl в системе координат, помеченной двумя штрихами, после чего Uj полагают равной нулю. На рис. 3.15(b) изображена оболочечная конструкция, которая моделируется в виде системы плоских пластинчатых конечных элементов. На рис. 3.15(c) и (d) в векторном виде отражены условия равновесия для моментов в узле i для сечения А - Л. Из рнс. 3.15(c) следует, что в глобальной системе координат существенны составляющие векторов в обоих направлениях х а у. Однако, согласно рис. 3.15(d), на котором изображены векторы моментов М в осях элементов, а также связанная система координат х -у (ось х которой направлена по касательной к оболочке в точке i), очевидно, что проекции векторов на ось у малы по сравнению с проекциями на ось х . Вообще говоря, в реальной конструкции составляющая вдоль оси у равна нулю. Указанная диспропорция компонент в ортогональных направлениях приводит к серьезным последствиям прн решении глобальных уравнений. Один из способов избавиться от этих последствий состоит в том, чтобы в каждом узле ввести связанную систему координат х -у и исключить малые составляющие вдоль оси у , как если бы это были закрепленные степени свободы. На примере задачи, представленной на рис. 3.15(a), опишем подробнее, каким образом преобразуется глобальная матрица жесткости, чтобы она соответствовала системе координат, связанной с узлами. Для заданных координат узлов i и j направляющие косинусы осей системы координат х -у вычисляются в виде 1х= - {Xi-Xj)IL, 1у={У1-yi)IL по отношению к осям системы координат х-у, где L=У{х~х-)+{yi~yj)\ Теперь, используя полученные направляющие косинусы, проекции смещения ui и и} можно выразить через проекции смещения Ui и Vi следующим образом (см. разд. 2.7, где приведен указанный вид преобразования): uilu-lyVi, (3.37) vi==lyU; + lVi. (3.38) Для глобальной матрицы жесткости это значит, что столбец исходной глобальной матрицы жесткости, умноженный на следует умножить на 4 и вычесть из произведения 1у на столбец, умноженный на Vi. Полученный вектор-столбец, соответствующий заменяет вектор-столбец, соответствующий Ui. Эта операция проиллюстрирована на рис. 3.16. Аналогичная операция, отвечающая (3.38) и заменяющая у,- на vl, также представлена на рис. 3.16. Силовые равенства (строки) в глобальных уравнениях жесткости преобразуются на базе аналогичных рассуждений. Так, согласно обычному преобразованию координат, имеем P.f-P, + /y, (3.39) = + (3-40) Согласно ЭТИМ уравнениям, новая строка, стоящая на месте f , строится путем умножения на строки, соответствующей F и умножения на 1у строки, соответствующей F., и последующего 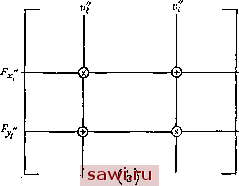 Рис. 3.16. Лодифицированная 1Лобальная матрица жесткости, (а) Исходная глобальная матрица жесткости; (Ь) модифицированная глобальная матрица жесткости. Строка для Fx- получена суммированием умноженной на 1 строки для Fx/ II умноженной на ty строки для Fy.; строка для Fy получена суммированием умноженной на -1у строки для F и умноженной на / строки для Fy; столбец для получен суммированием умноженного на 1 столбца для и умноженного на 1у столбца для V;; столбец для и получен суммированием умноженного на - столбца для ui и умноженною на 1 столбца для vi. Замечание. Произведения коэффициентов при строках и столбцах на главных диагоналях (помечены символом х) и на перееечениях (-f) равны соответственно квадратам и произведениям величин 1 и /у. сложения строк. Новая строка, стоящая на месте Fy., также строится путем реализации операций, отвечающих уравнению (3.40). Перечисленные операции должны быть выполнены в каждом узле, где требуется провести преобразование системы координат. Установим охранное оборудование. Тел. . Звоните! |