
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Проектирование конструкций 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 X - у. Постройте матрицу жесткости в терминах Р., (Симметрично)
10.0 -2.5 1.83 4.5 2.5 2.5 -2.5 -2.5 2.5 3.9. Исследуйте изображенную на рис. Р3.9 (размеры даны в дюймах) конструкцию согласно методике, оговоренной в задаче 3.5. Трапециевидную пластину разбейте на прямоугольные и треугольные пластины. Соответствующие матрицы жесткости приведены на рис. 5.4 и 9.13; £=20-10 фунт/дюйм, ц=0.2. 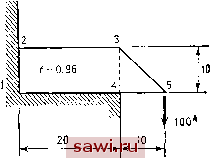 Рис. Р3.9. (Линейные размеры даны в дюймах.) 3.10. Постройте необъединенную глобальную матрицу жесткости f J и глобальную кинематическую матрицу [А] для конструкции из задачи 3.5. Вычислите на компьютере глобальную матрицу жесткости с помощью Ы]( к jlA]. 3.11. Постройте необъединенную глобальную матрицу fk* J и глобальную кинематическую матрицу [А] для конструкции из задачи 3.6. Вычислите вручную или на компьютере глобальную матрицу жесткости с помощью преобразования [ДРГкЛД]. 3.12. Постройте необъединенную глобальную матрицу жесткости Г к* J и кинематическую матрицу системы [А] для конструкции из задачи 3.7. Вычислите глобальную матрицу жесткости [к]. 3.13. Обобщите утверждение (3.5), включив начальные смещения {Д } в вектор перемещений и соответствующие силы {Р } в вектор сил. Начальные смещения Рис. Р3.14. Шиненные размеры даны в футах.) 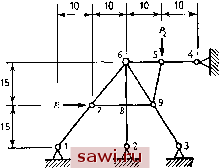 А= const Е const суть заданные величины, а соответствующие им силы неизвестны. Обобщите процедуру решения, определенную в (3.5), чтобы учесть указанные условия. 3.14. Исследуйте кинематическую устойчивость изображенной на рис. P3.I4 (размеры даны в фунтах) фермы с по.мощью процедуры исключения Гаусса - Жордана, примененной к трем уравнениям равновесия конструкции, т. е. исключите узлы 5-9. 3.15. Получите уравнения равновесия в матричной форме для изображенной на рис. Р3.15 (размеры даны в дюймах) фермы и примените процедуру исключения Гаусса - Жордана для выявления дополнительных сил (все площади равны). 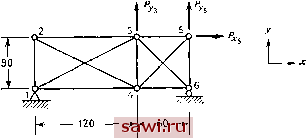 Рис. Р3.15. (Линейные размеры даны в дюймах.) 3.16. Рассматривая элементы 2-3 и 3-4 как подконструкций для конструкции из задачи 3.1, исключите Wg и как внутренние степени свободы и постройте матрицу жесткости конструкции относительно w, Q Щ t- 3.17. Изображенные на рис. Р3.17 элементы 1-2 и 2-3 имеют только крутильную жесткость k=GJlL. Вычислите углы закрутки 9 и 6, обусловленные при- ложенными скручивающими моментами 1 М и М 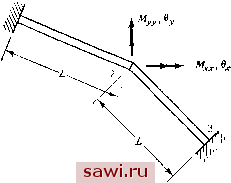 Рис. Р3.17. 3.18. Предполагается, что уравнения связи в задаче с п степенями свободы имеют вид lG]{A}={s), где [G] есть (лХп)-матрица. Разделите степени свободы на две группы и {Ас}(л г)х1- Постройте матрицу преобразований в внде (3.31) (учитывая однако вектор {s}). Выпишите уравнения жесткости в редуцированной форме (т, е. уравнения жесткости в терминах {A})- ОСНОВНЫЕ СООТНОШЕНИЯ ТЕОРИИ УПРУГОСТИ в этой главе получим основные дифференциальные соотношения линейной теории упругости. Подробный вывод этих соотношений проводится в прямоугольной системе координат для двумерного случая. Этот случай в основном рассматривается в главах, в которых излагаются основы метода конечных элементов. Без вывода приведем также соотношения, которые обобщают результаты, полученные для двумерного случая, на трехмерные задачи. Обобщения на более частные случаи и системыкоординат отложи.ч до глав, в которых рассматриваются соответствующие типы конечных элементов. Следует также заметить, что вывод указанных соотношений осуществляется простейшим способом с минимумом строгости. Данный подход соответствует уровню изложения, характерному для более ранних книг по теории упругости [4.1, 4.2] или сравнительно недавно вышедших курсов, которые можно назвать повышенными курсами сопротивления материалов [4.3, 4.4]. Более строгий уровень построения теории, включающий нелинейные аспекты и более общие типы поведения материала, читатель может найти в книгах [4.5-4.7]. В теории упругости имеются три системы соотношений: (1) дифференциальные уравнения равновесия; (2) соотношения, связывающие деформации с перемещениями, и условия совместности; (3) уравнения состояния материала. Для любого тела, имеющего конечные размеры, системы (1) и (2) дополняются граничными условиями. В данной главе выводится каждое из этих соотношений, а затем в общих чертах показано, как из совокупности указанных соотношений получить определяющую систе.му уравнений. В заключение приводятся некоторые замечания, касающиеся вопроса единственности решения задач упругости и его значимости для метода конечных элементов. Установим охранное оборудование. Тел. . Звоните! | |||||||||||||||||||||||