
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Проектирование конструкций 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 4.2. Граничные условия для напряжений 4.2. Граничные условия для напряжений Дифференциальные уравнения равновесия должны выполняться в любой внутренней точке тела. Помимо этого, необходимо учесть условия равновесия на границе тела (статические граничные условия). Рассмотрим, согласно рис. 4.3, границу двумерной области, на которой действуют заданные поверхностные усилия и Ту* Л, ds- 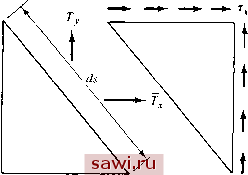 Рис. 4.3. Обычно эти поверхностные силы определяются как силы, направленные вдоль оси X к у н действующие на единицу площади поверхности, расположенной под некоторым углом к указанным осям. На рис. 4.3 изображен участок поверхности длиной ds для плоского напряженного состояния (так как рассматривается пластинка единичной толщины, то площадь поверхности численно равна длине ds). Символами 1 и 1у обозначены соответственно косинусы углов между нормалью к поверхности и осями х и у. Из условий равновесия в направлении оси х имеем Txds==a,(l,db) + x[l ds) а для направления вдоль оси у - FylyOy--lxXxy (4.5а) (4.5Ь) * В этой книге все задаваемые величины (граничные усилия, перемещения) обозначаются символами с чертой сверху. В методе конечных элементов рассматриваются условия равновесия не только во внутренних точках конструкции или на ее внешних поверхностях, но и в точках соприкосновения элементов. На границе каждого из соприкасающихся элементов в середине имеется некоторое напряженное состояние, поэтому уравнения должны выполняться в каждой точке соприкасающихся граней. На рис. 4.4(a)
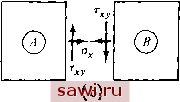 Рис. 4.4. изображены два соседних элемента А н В, поверхность соприкосновения которых проходит по оси у глобальной системы координат. На поверхности раздела не действуют внешние нагрузки. Для выяснения условий равновесия на границе элементов разделим элементы, как показано на рис. 4.4(b). В соответствии с ориентацией поверхности раздела имеем /j,=0, lx=l, и уравнения (4.5) сводятся к уравнениям Тх=Ох, Ту=Хху. , Следовательно, если граница раздела между элементами проходит вдоль оси у, то для выполнения условий равновесия требуется лишь, чтобы нормальная компонента напряжения и касательная компонента ту на этой границе были непрерывны. Разрешается, чтобы нормальная компонента напряжения Оу, если она существует, была разрывной при переходе этой границы в направлении X. Если поверхность раздела наклонена под некоторым углом к осям X и у, то нормальные и тангенциальные компоненты усилий на ненагруженной поверхности (Тп и Ts) должны быть непрерывны на границе, разделяющей элементы. С каждой стороны от поверхности раздела два усилия выражаются через три компоненты напряжения. Поэтому, несмотря на то что компоненты напряжения в направлении координат могут изменяться при переходе от одного элемента к другому, условия равновесия при переходе через поверхность соприкосновения элементов все же сохраняются. Перед нами снова возникла необходимость ввести символ, кото-)ый обозначал бы совокупность компонент некоторой переменной. Лричем этот символ должен отличаться от символа, соответствующего вектору, который задает значения этих компонент в той или иной точке. Вводимый таким образом символ есть тензор напряжений а, который включает в себя компоненты . . . t; этот символ будем записывать жирным шрифтом без скобок. Если нужно перечи- СЛИТЬ компоненты тензора а, то будем записывать их в виде вектор-строки или вектор-столбца в следующем порядке: \ OxOy ахуХу T.xJ. Аналогично поле заданных поверхностных усилий будем обозначать через Т и считать, что этот символ относится к совокупности Тх Ту J , а объемные силы объединим символом Х= \ XYZJ. Символом же, соответствующим вектору, обозначаются привычные понятия матрицы-строки [ J или матрицы-столбца { }. Если, например, напряжения для плоского напряженного состояния определить в двух точках, скажем 1 и 2, то запись примет вид {ofL (Ух, (г/, -Сху, Ох, Оу XxyJ. 4.3. Соотношения, связывающие деформации с перемещениями, и условия совместности При формулировке метода конечных элементов на основе метода перемещений очень важны кинематические дифференциальные соотношения, связывающие деформации с перемещениями. Наоборот, дифференциальные уравнения равновесия (условия статики), приведенные в разд. 4.1, не играют столь существенной роли при этом подходе. Рис. 4.5. 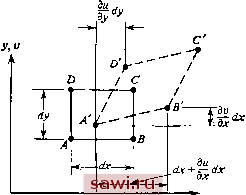 Для вывода соотношений между деформациями и перемещениями рассмотрим малое смещение из недеформированного состояния ABCD в деформированное состояние ABCD для бесконечно малого элемента, изображенного на рис. 4.5. В результате деформации имеем для малых (линейных) деформаций (ABr=(dx + pxy + (lidx] (4.6а) Установим охранное оборудование. Тел. . Звоните! |