
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Проектирование конструкций 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 наличии в нем напряжений. У изотропного материала зависимость деформаций от напряжений неизменна при ортогональном преобразовании координат. На рис. 4.7(a) изображено, как прикладываемое к образцу напряжение в направлении оси х вызывает деформацию образца в обоих направлениях х а у. Вдоль Рис. 4.7. И Л (ь) 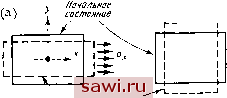 Дерормиройанное-состояние  оси x деформация равна попросту qJE. Образец сжимается и в направлении оси у, так как коэффициент Пуассона л отличен от нуля, поэтому в этом направлении деформация равна -csJE. Аналогично наличие напряжения вызывает деформации в направлении осей х и у, равные соответственно -[хо/ и OylE (как показано на рис. 4.7(b)). На значения относительных удлинений вдоль осей х и у не влияет наличие деформации сдвига, изображенной на рис. 4.7(c), которая связана со сдвиговым напряжением соотношением 2(l+i) Ух - £ ху В результате суперпозиции и записи соотношений в матричной форме (с 0= L <а; ху J . 8= 6. Еу Ту J ) ПОЛуЧИМ е=[Е]-Ч [Е]- = - 1 -и О (1-Ц)/2. О 2(1+1х) (4. И) (4.12) (4.13) Матрица [Е] называется матрицей жесткости материала, а [E]~- матрицей податливости материала. Аналогично выражению (4.10) можно непосредственно обобщить вышеприведенные соотношения на случай наличия начальных деформаций е = J , что приводит к соотношению е=[Е]-1о+е . (4.14) Начальные деформации представляют наибольший интерес в задачах термоупругости, где е!( =е =аГ, у]Ру=0, для изотропного тела с коэффициентом линейного расширения а и отклонением температуры от температуры ненапряженного состояния на Г. Наиболее часто применяемый подход при построении конечно-элементной модели - подход, при котором задаются функции перемещений,- требует, чтобы напряжения были выражены через деформации. Поэтому, обращая уравнение (4.14), получим а=[Е]е-[Е1е . (4.15) Теперь благодаря матричным уравнениям (4.14) и (4.15) в нашем распоряжении имеется достаточно общее представление механических свойств материала. Проводя обобщения на шестимерные векторы а и е, можно охватить все разнообразие задач трехмерной теории упругости. Полностью заполненная матрица [Е] размерностью 6x6 определяет общий случай анизотропного материала, который обладает различными свойствами в различных направлениях. Много частных случаев поведения материала находится в диапазоне между изотропией и полной анизотропией. Так, в частности, сюда можно отнести ортотропные материалы, имеющие три взаимно перпендикулярные плоскости упругой симметрии. В последующих главах будет подробно представлен ряд матриц [Е] и [Е]~1 специального вида, отвечающих требованиям соответствующей конечно-элементной модели. Важным свойством всех матриц жесткости и податливости для рассматриваемых здесь материалов является их симметричность (см. соотношения (4.12) и (4.13)). Пока достаточно отметить, что метод конечных элементов особенно хорош при решении задач со сложными жесткостными свойствами материала. Из дальнейшего будет видно, что матрица [Е] (или обратная к ней матрица) легко обрабатывается в алгоритмах численного интегрирования. Ограничения, накладываемые на сложность и представления жесткостных характеристик материала, часто диктуются практикой: для большинства практических заач трудно располагать большей информацией о механических характеристиках материала, чем полученной в результате эксперимента информацией о зависимости напряжений от деформаций для орто-тропного материала в двумерном случае. Исключение составляют слоистые пластины с ортотропными слоями (механические характеристики слоев можно определить экспери.ментально, а затем вычислить характеристики всей слоистой пластины) и композитные материалы (например, стекло-волокнистые композиты). Благодаря особой роли композитов как ортотропных материалов, применяемых на практике, публикации, касающиеся их разработки и использования, представляют отличный источник информации для детального построения вполне общих соотношений, задающих жест-костное поведение материала (см. [4.8]). 4.5. Дифференциальные уравнения равновесия и совместности 1J9 4.5. Дифференциальные уравнения равновесия и совместности Приведенные выше системы уравнений можно объединить с целью получения альтернативных форм дифференциальных уравнений, точное решение которых будет удовлетворять и исходным уравнениям. Эти альтернативные формы называются соответственно дифференциальными уравнениями равновесия и совместности. Сделаем несколько замечаний относительно мотивировки построения указанных дифференциальных уравнений. Ранее были независимо сформулированы два набора условий: статические и динамические. Статические условия записываются исключительно через статические переменные (напряжения или функции напряжений). Кинематические условия записываются только через кинематические переменные (перемещения или деформации). Для единственности решения необходимо связать статические и кинематические переменные. Это осуществляется с помощью введения определяющих соотношений. Выведем сначала дифференциальные уравнения равновесия, так как подход, использующий при построении конечно-элементной модели метод жесткостей (или метод перемещений), одновременно может служить подходом, позволяющим получить приближенное решение этих уравнений. Для простоты исключим из рассмотрения объемные силы и начальные деформации (Х = 7=0, {8 }=0). Вывод искомых уравнений заключается в построении соотношений, связывающих напряжения с перемещениями, с последующей подстановкой этих соотношений в дифференциальные уравнения равновесия. Например, подставляя соотношения, связывающие дефор-.мации с перемещениями, в уравнение состояния для а, получим . = Г=]12а+те]125- (4.16) Аналогичные операции нужно провести также для Оу и iy. Далее, подставляя полученные соотношения в дифференциальные уравнения равновесия (уравнения (4.2а) и (4.2Ь)), имеем ди , L-цац дх 2 ду 2 дх ду 4{\-у.)дхдц- Е аи (4-17) 2 (1 -ц) дхду Если можно найти отвечающие кинематическим граничным условиям непрерывные однозначные поля перемещений, которые удовлетворяют вышеприведенным соотношениям и соответствующим граничным условиям, то будет найдено искомое точное решение. Это и есть теорема единственности. Установим охранное оборудование. Тел. . Звоните! |