
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Проектирование конструкций 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 рис. 5.3. Постройте матрицу жесткости [S] для прямоугольного элемента в плоском напряженном состоянии, который сформирован на базе функций формы, приведенных в задаче 5.2. Выбрать в качестве переменных величины х у. 5.4. Постройте матрицу жесткости для приведенного в разд. 5.3 треугольного плоско-напряженного элемента из ортотропного материала. 5.5. Сформулируйте процедуру построения матрицы жесткости балочного элемента на основе метода взвешенных невязок с критерием Галеркина и проиллюстрируйте ее на примере построения первой строки матрицы (f j в зависимости от %, 9i, w, Эа). 5.6. Выведите, используя метод взвешенных невязок с критерием Галеркина, необходимые интегральные соотношения для непосредственного построения матриц жесткости элементов в плоском напряженном состоянии, если известны поля перемещений. 5.7. Обобщите прямой метод на непосредственное построение матриц податливости элементов и проиллюстрируйте подход построением матрицы податливости балочного элемента. 5.8. Обобщите прямой метод на непосредственное построение матриц связи сил с перемещениями смешанного вида (см. гл. 2) и проиллюстрируйте это на примере балочного элемента. 5.9. Постройте матрицу теплопроводности для плоского треугольного элемента, используя прямой метод в предположении линейного характера распределения температур: Г=Л1Г1+Л2Г2-1-ЛзГз, где Tj, и Г3 -значения температуры в узлах элемента. 5.10. Дифференциальное уравнение, описывающее выпучивание балки, имеет вид = 0. Используя метод взвешенных невязок с критерием Галеркина, получите интегральную форму соотношений, необходимую для построения соответствующих уравнений жесткости элемента. Предположите, что поле перемещений аппроксимируется в виде w=N,Wi-i-NiQi+Ni-l-NiQi, где Ni, , , . , задаются с помощью (5.14а). Л/2. 2 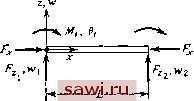 Рис. Р5.10. ВАРИАЦИОННЫЕ МЕТОДЫ ПОСТРОЕНИЯ КОНЕЧНЫХ ЭЛЕМЕНТОВ Вариационные или энергетические методы исследования конструкций образуют мощный и широко применяемый подход к построению соотношений для конечных элементов. Простейшие варианты этих методов используются для расчета инженерных конструкций уже более ста лет. Однако некоторые усложненные варианты вариационных и энергетических методов так же современны, как и сам конечно-элементный анализ элементов, и их развитие, по-видимому, обусловливалось желанием создать новую теоретическую основу метода конечных элементов. Так или иначе, последние работы в этой области дают всесторонний анализ возможных вариационных принципов строительной механики, в частности определяют область их применения и выявляют присущие им недостатки. В данной главе соответствующие вариационные принципы механики конструкций описываются с учетом их дальнейшего использования для построения конечно-элементных соотношений. Применение этихл принципов при построении соотношений для всей конструкции излагается в гл. 7. Таким образом, предполагается, что соотношения между силами и перемещениями для каждого отдельного конечного элемента можно построить независимо, а построение соотношений для всей конструкции - отдельная процедура. Это согласуется с изложенным в разд. 2.2 и использовавшимся далее в гл. 3 и 5 подходом к расчету стержневых конструкций методом конечных элементов. Однако энергетический метод позволяет по-иному подойти к методу конечных элементов и получить глобальные соотношения, суммируя энергию отдельных элементов. Вопросы перехода от одной точки зрения к другой обсуждаются в этой и следующей главах. Данная глава начинается с подробного изложения вывода соотношений принципа виртуальных перемещений. Далее кратко излагаются основные понятия вариационного исчисления и подробно изучаются экстремальные принципы минимума потенциальной и дополнительной энергии. Эти принципы представляют собой специальную форму более общих принципов виртуальных перемещений и виртуальных сил соответственно. В заключение кратко рассматриваются смешанные вариационные принципы, а также гибридные и обобщенные вариационные методы построения элементов, основанные на экстремальных принципах потенциальной или дополнительной энергии. В данной главе рассматривается только отдельно взятый конечный элемент. Все выражения записываются так, как если бы вся конструкция являлась конечным элементом, поэтому нет необходимости вводить верхние и нижние индексы, чтобы различать глобальные и локальные величины. 6.1. Принцип виртуальной работы 6.1.1. Формулировка и доказательство принципа Принцип виртуальной работы лежит в основе следующих вариационных принципов, описываемых ниже: классических принципов стационарности потенциальной и дополнительной энергии, а также менее известных смешанных принципов. Принцип виртуальной работы, по сути дела, служит независимым подходом к построению соотношений метода конечных элементов. Используются две формы общего принципа: принцип виртуальных перемещений и принцип виртуальных сил соответственно. Они приводят к общеизвестным принципам стационарности потенциальной и дополнительной энергии. В формулировке принципа виртуальной работы, использующей виртуальные перемещения, предполагается, что на тело, находящееся в состоянии равновесия, действуют объемные и поверхностные силы, при этом задается виртуальное (воображаемое) поле переме- (а) (Ь) Рис. 6.1. Сравнение допустимых и недопустимых виртуальных перемещений: (а) допустимые; (Ь) недопустимые. щений, характеризующееся в каждой точке компонентами би, би, Ьы>. Виртуальные перемещения должны быть кинематически допустимыми, т. е. непрерьшны.ми функция.ми пространственных координат, и удовлетворять кинематическим граничным условиям на участках поверхности, где эти условия заданы. На рис. 6.1 (а), к примеру, пунктирными линиями изображены кинематически допустимые перемещения балки. Каждое из допус- Установим охранное оборудование. Тел. . Звоните! |