
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Проектирование конструкций 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 -Уз Уз о о 0 0 о 0 0 - Xi -Ха Xi Xa - Xi -Ха Xi -Уа У а О Матрица жесткости, полученная с использованием [D] в выражении (6.12а) для виртуальной работы, совпадает с изображенной на рис. 5.4 из-за простого характера линейного поля, задаваемого с помощью L N J. Построение матриц [т] и {Р } оставляем читателю в качестве упражнения (см. задачи 6.4 и 6.7). Для плоского напряженного состояния распределенные нагрузки обычно прикладываются к краям конструкции, а не в виде нагрузок, распределенных по поверхности элемента. Следовательно, для подсчета {Р} имеет смысл рассмотреть вопросы, связанные с распределением нагрузок по поверхности всей конструкции. Целесообразно отложить обсуждение этих вопросов до гл. 9, где рассматриваются глобальные аспекты расчета задач плоского напряженного состояния. Как стержневой, так и треугольный элемент с линейным распределением перемещений дает неправильное представление об особенностях построения конечных элементов с использованием принципа минимума потенциальной энергии (или виртуальной работы). Это происходит из-за характера предполагаемых полей перемещений, которые соответствуют полям напряжений, удовлетворяющим дифференциальным уравнениям равновесия. Например, для треугольного элемента оказывается, что дифференциальное уравнение равновесия dajdx+dxjgy/dy=0 тождественно удовлетворяется, если в него подставить выражение (5.7а) для напряжений Полученная матрица [к] совпадает с матрицей, построенной с помощью прямого метода. Так как поле перемещений в элементе имеет простой вид, то пропорциональное задание узловых сил с помощью транспонирования матрицы, связывающей перемещения и деформации, и непосредственное задание сил в узлах приводят к идентичным результатам. Что касается термоупругих сил, то, как и следовало ожидать, компоненты вектора {F *} представляют силы, требуемые для компенсации перемещений элемента, вызванных приращением температуры Г. Кроме того, реализация распределенных нагрузок совпадает с той, которая получена в результате выполнения процедуры пропорционального распределения нагрузок по узлам. Рассмотрим треугольный элемент, изображенный на рис. 5.3. Согласно (5.21а), имеем L N J = L (хУа - хуа - ху + ху) (хуа-ХаУ) (ху) J , а из (5.22) следует, что 6.4.4. Аппроксимация геометрических характеристик В разд. 3.4 было отмечено, что одним из преимуществ метода конечных элементов является возможность рассчитывать конструкции сложной геометрии. Следует, однако, отметить, что, как правило, реальную конфигурацию конструкции приходится при расчетах каким-либо образом аппроксимировать, а это служит дополнительным источником погрешностей. Хотя аппроксимации поведения (т. е. перемещений) уделяется больше внимания, вопросы, связанные с аппроксимацией геометрии конструкций, имеют такое же, а подчас и более важное значение. В настоящее время известно, что вариационный подход дает возможность более точно аппроксимировать геометрию конструкции. При обсуждении указанного круга вопросов полезно делать различие между трехмерными конструкциями, пластинами и призматическими телами. В случае трехмерных конструкций, как правило, имеют дело с криволинейными поверхностями, а для пластин и призматических элементов основными параметрами являются вариации толщин и площади. Некоторые основные рассмотрения аппроксимации последних приводятся в данной главе. Вопросы аппроксимации геометрии трехмерных тел обсуждаются в последующих главах. Стержневой элемент с переменным поперечным сечением, изображенный на рис. 6.7, иллюстрирует основные факторы аппроксимации геометрии конусообразных призматических элементов и 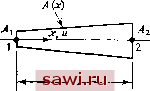 Рис. 6.7. Стержневой элемент с сужающимся переменным поперечным сечением. пластин переменной толщины. Обычно при расчетах профилированные элементы аппроксимируются ступенчатым образом с использованием элементов постоянной толщины. Это - хорошая аппроксимация, если берется достаточно большое количество элементов, однако вычисления показывают, что возникающая при такой ап- 1о = [Е1 (D] {А}. Однако выбор кинематически допустимого поля перемещений обычно осуществляется без учета условий равновесия, и поэтому, вообще говоря, это поле не будет удовлетворять указанным условиям. Данное обстоятельство будет в дальнейшем проиллюстрировано при построении более сложных элементов. 6. Вариационные методы построений конечных элементов проксимации ошибка может превосходить ошибку от аппроксимации полей перемещений. Альтернативой ступенчатому представлению служит простая аппроксимация величины А {х) во всем конструктивном элементе либо на сегментах, разбивающих этот конструктивный элемент. Указанная аппроксимация необходима в силу следующего обстоятельства. Если требуется найти явный вид матрицы жесткости элемента, то, как легко видеть, никаким единым представлением А {х) нельзя задать точно все возможные формы конструкции. Учитывая сказанное, запишем энергию деформации элемента в виде Функция перемещения (5.5), использовавшаяся ранее для элемента постоянного сечения, в нашем случае не является точной, так как она приводит к условию постоянства деформаций, которое уже не выполняется вдоль оси элемента. Однако эта аппроксимация удобна и будет здесь использована. Для данного примера предположим, что А {х) (см. рис. 6.7) изменяется между точками 1 и 2 линейно. Поэтому запишем где Л1 и Ла - площади поперечного сечения в точках 1 и 2. Для указанных аппроксимаций перемещений и геометрических характеристик получим выражение для энергии деформации {l}[K-x)ij{t}]L--u{::}, После интегрирования получим Путем сравнения можно построить следующую точную матрицу жесткости стержневого элемента с линейным изменением толщины 1 -1 -1 1 Установим охранное оборудование. Тел. . Звоните! |