
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Проектирование конструкций 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 Очевидно, что перечисление компонент вектора в виде столбца невыгодно с типографской точки зрения, поэтому мы будем записывать эти компоненты в виде вектор-строки, обозначаемой символом . Транспонированную матрицу определим как матрицу, получаемую заменой ее строк на столбцы. Согласно этому определению, при транспонировании вектор-столбца получается вектор-строка и наоборот. Так, обозначая транспонирование латинским верхним индексом Т, можем записать рассматриваемые векторы в следующем виде: Отдельная компонента произвольного вектора, задающего п перемещений в узле {А}= L Ai--.Ai.--An J . например Aj, называется i-u степенью свободы. Первым шагом на пути определения векторов сил и перемещений является задание узловых точек и их расположения относительно координатных осей. В методе конечных элементов следует различать глобальные и локальные системы координат, а также системы координат с началом в узловых точках. Глобальные оси координат задаются для всей конструкции, описываемой многими конечными элементами. Локальные (или элементные) оси координат связаны с отдельными элементами. Так как элементы, вообще говоря, различным образом ориентированы друг относительно друга (ситуация наглядно отражена в гл. 1 при изложении примеров численного анализа авиационных конструкций, судов и реакторов), то локальные оси координат также в общем случае различно ориентированы. На рис. 2.2(a) локальная система координат обозначена штрихами. И наконец, ориентации систем координат, определенных в точках соединения элементов, различны, вообще говоря, для некоторых или для всех элементов, соединенных этой точкой. Эти оси координат отмечаются двумя штрихами. В книге координаты помечаются одни.м и двумя штрихами только в том случае, если различные координатные системы сравниваются или появляются в одном и том же месте текста. Если же рассматривается одна из координатных систем, то штрихи не пишутся. Локальные координаты используются в большинстве случаев при формулировке уравнений для отдельных элементов, и ниже описываются способы введения локальных координат для элементов и нумерации узлов элемента. Глобальные координаты фигурируют в основном в гл. 3 при выводе в разд. 3.1 и 3.2 уравнений для всей конструкции (глобальные уравнения). Значение и характер применения координат с началом в узловых точках становятся ясными в п. 3.5.3. На рис. 2.2(b) изображен принятый в книге способ введения систем координат и нумерации узлов для плоских конечных элементов. Ближайший к началу координат или совпадающий с ним узел принимается за узел 1. Далее следующему в положительном направлении оси X узлу на плоскости х - у присваивается номер 2. Оси координат с началам в узлах 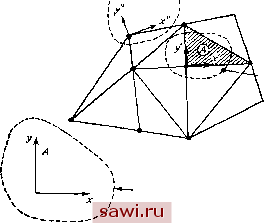 Глодальиые оси /!окальные оси для элепента А 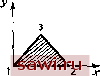 Рнс. 2.2. Оси координат и правило нумерации узлов, (а) Типы координатных осей, (Ь) оси координат и правило нумерации узлов. Способ нумерации соответствует движению против часовой стрелки. Так определяются плоские элементы (пластинчатые в плоском напряженном состоянии или при изгибе, а также элементы в случае плоской деформации), лежащие в плоскости х - у. Иначе нумеруются элементы поперечных сечений осесимметричных тел. Правила для нумерации узлов в трехмерных элементах аналогичны вышеприведенным. Зная основные свойства упругого поведения конечного элемента или конструкции в локальной системе координат, можно легко осуществить преобразование сил и перемещений к глобальной системе координат. 2.2. Идеализация с помощью основных конечных элементов 2.2. Идеализация с помощью основных конечных элементов Для того чтобы оценить значение различных альтернативных подходов при формулировке конечно-элементных соотношений, полезно изучить взаимосвязь между простой моделью поведения конечного элемента и поведением реальной конструкции. Эта модель наглядно характеризует поведение элемента, хотя существуют и другие равноценные способы рассмотрения основополагающих концепций метода конечных элементов. Действительно, подход, основанный на энергетических или вариационных принципах (гл. 6),- это, по-видимому, наиболее широко используемая схема реализации метода конечных элементов. Однако в этом подходе основополагающие концепции метода конечных элементов рассматриваются с других позиций, нежели в настоящей главе. Для рассматриваемой здесь простой модели каждому конечному элементу в реальной конструкции отвечает распределенное поле напряжений. Однако для построения математической модели напряженное состояние представляется силами - обобщенными силами - в точках соединения, или узлах элементов. Соответственно смещения этих точек - степени свободы - используются для описания перемещений элемента. Реальное и идеализированное поведения типичного элемента сравниваются на рис. 2.3. Действительное распределение напряжений на границе элемента изображено на рис. 2.3(a); действительные   Рис. 2.3 Конечно-элементное представление поведения тела, (а) Реальное поведение (о - реальное нормальное напряжение), (Ь) основной этап идеализации (а .- идеализированное нормальное напряжение); (с) идеализация, необходимая на этапе расчетов смещения имеют такой же нерегулярный характер. На рис. 2.3(b) показан основной этап идеализации, а именно непосредственное представление предполагаемого поведения элемента. Считается, что поля напряжений, деформаций и перемещений имеют упрощенный вид. И наконец, на рис. 2.3(c) показана идеализация, необходимая на этапе проведения расчетов. Здесь распределенные вдоль края напряжения заменены обобщенными силами в узлах. Таким образом, процесс построения соотношений в методе конечных элементов Установим охранное оборудование. Тел. . Звоните! |