
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Режимы работы кранов 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 Продолжение табл. 15.2
Vi 9 Абрамович И. И. в др. 15.3. Удельная масса крановых электроприводов, кг/кВт Мощность электродвигателя, кВт
заться необходимым и целесообразным применить систему, не обладающую оптимальными экономическими показателями. 15.4. ЭЛЕКТРОПРИВОДЫ С АСИНХРОННЫМИ ФАЗНЫМИ ДВИГАТЕЛЯМИ И УПРАВЛЕНИЕМ ИЗ КАБИНЫ Область применения электроприводов с торможением способом противо-включеиня. Рассматриваемые электроприводы до последнего времени благодаря простоте реализации находят наиболее широкое применение для крановых электроприводов, особенно для механизмов передвижения. В механизмах подъема эти электроприводы заменяются системами с динамическим торможением самовозбуждением. Комплектные электроприводы выполняют на основе асинхронных крановых двигателей с фазным ротором при управлении от силовых контроллеров ККТ-60 и магнитных контроллеров типа ТА, ДТА, ТСА, К, ДК, КС. Электроприводы с силовыми кулачковыми контроллерами и магнитными контроллерами ТА, i ДТА (для механизмов передвижения) и ТСА (для механизмов подъема) с цепями управления на переменном токе применяют для краиов общего назначения, а с магнитными контроллерами К, ДК (механизм передвижения) и КС (механизм подъема) с цепями управления на постоянном токе для кранов металлургического производст]ва. Особенности использования контрол-; леров определяют некоторые их кон- ; структивные различия. Например, кон- троллеры К и КС имеют индивидуаль-ную защиту, а контроллеры ТА, ТСА имеют общую защиггу, вынесенную на; отдельную защитную панель, в кон-, троллерах ДК для двух- и многодвига-} тельных электроприводов преду смотре- j но разделение силовых цепей двигате ; лей для повышении надежности работа системы и др. Мощность электроприводов с сило- выми кулачковыми контроллерами со- ставляег 1,7 ... 30 кВт; она може1; быть увеличена до 45 кВт при введении контакторного реверсора, а электр приводов с магнитными контроллерамв! от 3,5 до 100 кВт для механизмов пера? движения и от И до 180 кВт для меха? иизмов подъема (мощности указаны для группы режима работы механизма 4М при ПВ = 40 %). Применяемые в рассматриваемых электропривода? методы регулирования скорости и осу ществление тормозныж режимов опр деляют их невысокие регулировочны< и энергетические свойства. Характер*! ным для таких систем является отсу ствие устойчивых посадочных и проме жуточных скоростей, а также большие потери в пускотормозных резисторах. В целом условный диапазон регулир вання скорости этих электроприводе не превышает 3:1. Электроприводы систем К-АДФ! МКП-АДФ механизмов подъема. Схе электропривода с кулачковым контре лером ККТ-61А показана на рис. 15.1ч Схема электропривода с контроллеро!! ККТ-68А почти аналогична схеме элеЩ тропривода с контроллером ККТ-61А* В цепи статора электропривода с коГ троллером ККТ-68А применен контак торный реверсор, а освободившие 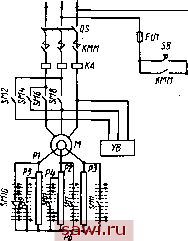 FU2 Подъем Спуск I- SB Рис. 15.1. Схема электропривода системы управления К-АДФ с силовым контроллером типа ККТ-61А контакты контроллера использованы для параллельного включения ступеней резисторов в цепн ротора. Механические характерястики электропривода с силовыми контроллерами показаны на рис. 15.2. При построении механических характеристик рассматриваемых электроприводов основным вопросом является выбор значения начального пускового момента. С одной стороны, с точки зрения снижения избыточного момента при разгоне и обеспечения посадочных скоростей прн опусканий легких грузов желательно уменьшить пусковой момент. С другой стороны, чрезмерное снижение начального пускового момента может привести К опусканию тяжелых грузов в положении подъема и возникновению больших скоростей прн нх опускании. Для исключения этого начальный пусковой момент должен составлять примерно 0,7Мн.(здесь Мн-номинальный момент двигателя в соответствующем режиме работы). На рис. 15.2 в качестве номинального момента принят момент двигателя при ПВ = 40 %. Прн ПВ = 25 % первой позиции контроллера будет соответствовать характеристика / с пусковым моментом, равным Мн при ПВ = 40 % ; соответственно другим позициям - характеристики 2-5. Для обеспечения начального момента пуско-Регулнрующие резисторы имеют от- пайки, позволяющие шунтировать часть ступени резистора. Контакты SM2, SM4, SM6, CMS контроллера (см. рнс. 15.1) выполняют реверсирование двигателя; контакты SM7, SM9 ... SM12 коммутируют ступени резисторов; контакты SM3 и SM5 использованы в цепях защиты. Одновременно с двигателем включается катушка тормоза YB. Защита электропривода осуществляется защитной панелью, на которой расположены контактор КММ, силовой рубильник QS, предохранители ft/7, FU2 и блок максимального 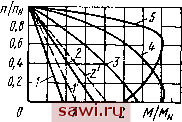 Рнс. 15.2. Механические характеристики электропривода системы управления К-АДФ силовым контроллером типа ККТ-61А и двухдвнгательиого электропривода системы управления К-АДФ с силовым контроллером типа ККТ-62А 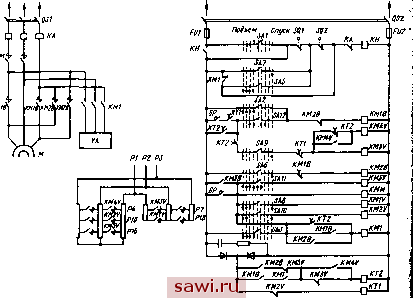
Рис. 15.3. Схема электропривода системы МКП-АДФ с магнитными контролле рами типа ТСА реле КА. Конечная защита осуществляется выключателями SQ2, SQS. В цепь катушки контактора КММ включены контакты SB кнопки включения, аварийного выключателя SA и контакты блокировки люка SQ1.
Рис. 15.4. Механические характеристики электропривода с магнитными контроллерами ТСА (см. рис. 16.3) На рис. 15.3 показан электропривод механизма подъема с магнитным кон- троллером типа ТСА. Электроприводе с контроллерами КС в основном аиа логичны электроприводам с магнитив ми контроллерами ТСА. Различай эти электроприводы тем, что в электрс приводе с КС цепь управления иа по стоянном токе, а защитные аппараты включая линейный контактор КМ.М рубильник QS1, максимальные ре ле КА, предохранители FUI, FU2, на кодятся иепосредствеино в магнитно контроллере и защита является инди видуальиой,а в электроприводах с ков троллерами ТСА используется защи иая панель. Ранее для ответственных электро приводов выпускались модификаци контроллеров типа ТСАЗ у правде нием на переменном токе. Электропр! воды с магнитными контроллерам обеспечивают автоматический разгон реверсирование, торможение и ступен чатое регулирование скорости иЦ реостатных характеристиках двига тели. Механические характеристики электропривода с ТСА приведены иа рис. 15.4. При подъеме груза разгон ведется под контролем реле времени КТ1 и КТ2; при этом механическая характеристика 4 янлиется нефиксированной. При опускании груза производится регулирование на характеристиках противовключення 1с и 2с к характеристике Зс, на которой в зависимости от массы груза двигатель работает в режиме силового опускания или в режиме генераторного торможения. Переход на характеристику Зс осуществляется по характеристикам Зс и 5 с под контролем реле времени. В схемах контроллеров выпуска до 1980 г. опусканию малых грузов соответствовал режим однофазного торможения, осуществляемый с помощью дополнительных контакторов. Этому режиму (см. рнс. 15.4) соответствует характеристика 0. В контроллерах выпуска после 1980 года этот режим в ТСА и КС был исключен. Прн опускании груза на характеристиках 1с и 2с оператор должен нажать педаль SP при установке рукоятки командоконтроллера иа соответствующую позицию. Управление педалью является вынужденным при данных механических характеристиках вслед- ствие возможного подъема груза вместо опускания. Электропривод переводится в режим противовключення не только при опускании груза, но и прн торможении нз положения опускания; причем на первой и второй позициях это осуществляется нажатием педали. Прн этом 33 время выдержки реле КТ2 одновременно с механическим торможением обеспечивается и электрическое на характеристике 2с. Кроме указанного, реле РТ2 контролирует также правильность сборки схемы. Схемы электроприводов механизмов передвижения систем управления К-АДФ, МКП-АДФ. Электропривод механизмов передвижения с кулачковыми контроллерами имеет одни или два двнгатсчя. Электропривод с одним двигателем и контроллером ККТ-61А полностью аналогичен электроприводу системы управления К-АДФ с силовым контроллером ККТ-61А (см. рнс. 15.1). Двухдвигательный электропривод с контроллером ККТ-62А показан на рис. 15.5. Принцип работы электроприводов с контроллерами ККТ-61А н ККТ-62А одинаков: контакты SM контроллера регулируют сопротивления в цепи роторов двигателей;, защита вынесена на отдельную защитную панель. Отличие состоит в том, что кнм yi 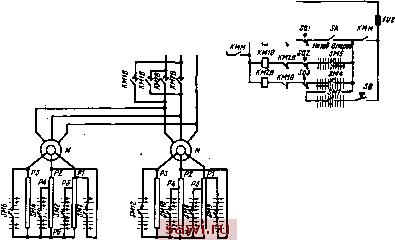 Рис. 15.5.-Схема двухдвигательного электропривода системы управления К-АДФ С силовым контроллером типа ККТ-62А 9 Абраноавч И. И. в др. Установим охранное оборудование. Тел. . Звоните! | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||