
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Режимы работы кранов 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 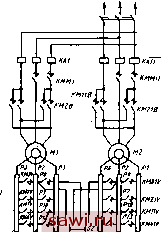 SB SQI SiZ КИг !1 KAI КАП КН1
ггев FU3 KMZ 11 т -.кАг KM11V -NT- KM4V -sp- KH1 KH1 KM*iy / 11 ilH-rr- SA? -CZD- -vf-CF- KM1B KMiB P№ KMUVk tttliH -TOT ПТМ li *  Рис. 15.6. Схема двухдвигательного электропривода системы управления МКП-АДФ с магнитным контроллером типа ДК в электроприводе с ККТ-62А реверсирование осуществляется контакторами КМ-1В н КМ-2В. Механические характеристики этих электроприводов идентичны механическим характеристикам электропривода на рис. 15.2. п1пс 1,0, 0,S- -0,5 -1,0
Рис. 15.7. Механические характеристики двухдвигательного электропривода системы управления МКП-АДФ с магнитным контроллером типа ДК Электропривод механизма передвижения с управлением от магнитного контроллера рассматривается на примере двухдвигательного электропривода с контроллером типа ДК краиово-металлургического исполнения (рис. 15.6). Этот электропривод обеспечивает симметричные механические характеристики (рис. 15.7). Управление осуществляется от командоконтроллера с обеспечением плавного опускания груза под контролем реле времени КТ1 и КТ2. Для торможения используется режим противовключения на характеристике 1 под контролем реле RH2. Катушка реле RH2 включена на разность напряжений, пропорциональных выпрямленному диодным мостом VZ напряжению ротора одного из двигателей и опорного напряжения сети. Регулированием потенциометров R1, R2 достигается задержка двигателя на характеристике / до нулевой скорости, после чего разрешается разгон двигателя в обратном направлении. В схеме предусмотрены необходимые ниды за- щиты, вынесенные на реле напряжения KHL Электроприводы подъема с динамическим торможением системы управления МКД-АДФ. Электроприводы с динамическим торможением самовозбуждением имеют значительно более высокие регулировочные н энергетические показатели, чем рассмотренные выше электроприводы с торможением противовключением. Эти электроприводы используют только для механизмов подъема, и их применение целесообразно при номинальных скоростях подъема более 0,08 м/с. Комплектные электроприводы охватывают все крановые асинхронные двигатели с фазным ротором при управлении от магнитных контроллеров типа ТСД. Эти электроприводы выпускают только для механизмов общепромышленного исполнения. Для крановых механизмов металлургического производства выпускается специальная серия электроприводов с режимом динамического торможения самовозбуждением и ти-рнсториымн узлами бездуговой коммутации, рассматриваемых ниже. Электроприводы с магнитными контроллерами имеют индивидуальную защиту. Контроллеры выпускаются двух типов соответственно для возбуждаемых н невозбуждаемых электродвигателей. Первые из этих контроллеров применяют для двигателей, напряжение на кольцах ротора которых не превосходит 300 В при напряжении сети 380 В; вторые - при напряжении ротора более 300 В. Применение режима динамического торможения самовозбуждением позволяет получить устойчивые посадочные скорости прн диапазоне регулирования 1 : 8; благодаря импульсно-ключевому включенню на первом положении подъема обеспечивается регулирование диапазона скорости до 1 : 7. Обладая повышенными регулировочными и энергетическими свойствами, рассматриваемые электроприводы позволяют значительно улучшить использование двигателей и повысить надежность работы контакторной аппаратуры благодаря снижению числа включений приводов при осуществлении доводочных операций, а также снизить нагрузки на механические передачи при натягивании грузовых канатов. Электроприводы с магнитными контроллерами типа ТСД рассмотрим на примере электропривода с возбуждаемыми двигателями. Электропривод с магнитными контроллерами типа ТСД (П6506) показан на рис. 15.8, а механические характеристики его приведены иа рио. 15.9. Реверсирование осуществляется контакторами КМ1 и КМ2, динамическое торможение - контактором КМ6, механически сблокированным с силовым контактором KML Подпитка двигателя в режиме динамического торможения осуществляется от сети через контакты контакторов КМ5, КМ6, две фазы двигателя, выпрямитель VD1, реле контроля КА2, резистор. Скорость регулируется контакторами КМ7 ... КМ10. Питание тормозных приводов производится через контакты контакторов КМ11 и КМЗ. При подъеме и опускании груза предусматривается автоматический разгон под контролем электронных реле времени КТ2 ... КТ4. Режим динамического торможения реализуется на всех положениях опускания груза, кроме последнего положения, на котором двнгате.1ь работает от сети с минимальным невыключаемым сопротивлением в роторе. При остановке привода .со спуска в течение времени выдержки реле КТЗ ... КТ4 остается включенным контактор КМ6 н осуществляется электродинамическое торможенне, что необходимо для облегчения работы тормоза. Малая скорость подъема реализуется с помощью тиристорного блока VS!, работающего в импульсно-ключевом режнме. Выпрямитель BD2 получает питание от зажимов обмотки ротора через конденсаторы CI. В цепи выпрямителя включены стабилитрон VD5 и управляющая часть оптрона VS2. Выходная часть оптрона включена в управляющие цепи тиристоров блока VS1, По уставке стабилитрона VD5 осуществляется автоматическое поддержание роторного напряжения независимо от нагрузки, а следовательно, и установленной малой частоты вращения вала электродвигателя. Управление электроприводом может осуществляться из кабины с помощью командоконтроллера, как описано вы-  ше, а также от кнопочного поста. Кнопочный пост имеет пять кнопочных блоков, из которых четыре двухходовые, т. е. с двумя положениями кнопки. Кнопочный пост имеет также индивидуальный ключ S3. Для работы от кнопочного поста Sn переключателем постов в кабине устанавливается режим управления с пола, а ключом S3 подготавливается работа с поста. При нажатии на посту кнопки SH включается контактор нулевой защиты КМП. При нажатии кнопки малой скорости спуска SCM с помощью вспомогательного контактора кем создается механическая характеристика малой скорости спуска. При нажатии кнопки большой скорости спуска SCS с помощью вспомогательного контактора КСБ двигатель разгоняется до выхода иа механическую характеристику большой скорости спуска. При переходе к малой скорости спуска происходит включение иа динамическое торможение с самовозбуждением и последовательным уменьшением ступеней резисторов в цепи ротора. Для реализации подъема с малой скоростью используется кнопка SCM, а для подъема с номинальной скоростью - кнопка SHE. При этом осуществляется пуск по всем ступеням. Вспомогательные контакторы KHMj кем и КСБ устанавливают на отдельной панели типа БКА. Поскольку при управлении от кнопочного поста реализуются необходимые скоростные параметры крана и производительность крана практически не снижается, такое управление может быть допущено для кранов группы режима ЗК ... 6К, т. е, управление из кабины является обязательным только для краиов группы режима 7К ... 8К. Электроприводы с импульсно-ключе-выми коммутаторами в цепи ротора асинхронных фазовых электродвигателей. Рассмотренные электроприводы с контакторно-контроллерной аппаратурой управления благодаря простоте и невысокой стоимости занимают превалирующее место в промышленности, , Однако повышение требований к крановым приводам массового применения ставит задачи значительного улучшения их технико-экономических показа-
Рис. J5.9. Механические характеристики электропривода системы управления МКД-АДФ с магнитным контроллером типа ТСД телей без существенного увеличения стоимости и усложнения эксплуатации. Основным направлением решения указанных задач является применение средств полупроводниковой техники в традиционных системах для повышения коммутационной устойчивости контактной аппаратуры и реализации более рациональных режимов регулиро-. ваиия и торможения. Простым примером такого решения являются электроприводы с динамическим торможением самовозбуждением, в которых применен неуправляемый вентильный мост. Электроприводы систем управления КИ-АДФ и МКИ-АДФ с импульсно-ключевыми коммутаторами типа ИКР в цепи ротора фазных двигателей позволяют обеспечить наряду с повышением диапазона регулирования скоростей 1 : 10 бестоковую коммутацию контроллеров с доведением их коммутационной износоустойчивости до уровня механической износоустойчивости. Такие электроприводы внедрены иа ряде кранов массового производства. Принцип импульсио-ключевого управления заключается в коммутации силовой цепи ротора асинхронного двигателя тиристорным коммутатором, выполненным по мостовой или треугольной схеме. При этом включение тиристоров коммутатора осуществляется по сигналу, пропорциональному ЭДС ро- тора, при превышении скольженяя двигателем заданного уровня, а отключение- в момент их естественной коммутации на частоте скольжения ротора. При импульсно-ключевом управлении автоматически реализуется режим включения-отключения электропривода с мягкими механическими характеристиками, осуществляемый оператором ранее для получения требуемой установочной скорости. Однако получаемый при этом диапазон регулирования в несколько раз превышает достигаемый в традиционных системах. При этом формирование пускотормозных характеристик не изменяется, и управление электропряводов во всех остальных режимах не отличается от обычных систе.м. Электроприводы типа ИКР разработаны для механизмов подъема и механизмов передвижения в одно- и двух-двигательном исполнении. Для механизмов подъема на их основе выпускаются магнитные контроллеры типа КСДБ для кранов металлургического производства с мощностями двигателей 40 ... 200 кВт с бестоковой коммутацией. Для механизмов передвижения такие электроприводы выпускаются по упрощенной схеме, обеспечивающей только малые скорости для кранов облегченной конструкции с мощностями двигателей 1,7 ... 15 кВт. Разработаны также электроприводы с бестоковой коммутацией для кра ново-металлургических панелей, однако они еще не освоены промышленностью. Система МКБ-АДФ. На рис. 15.10 приведена схема электропривода с контроллером типа КСДБ, в которой использованы тиристорный коммуатор в цепи ротора и контакторы с бездуговой коммутацией в цепи статора при совмещении традиционных методов регулирования с импульсно-ключевым управлением, что позволило построить высоконадежную крановую систему. Механические характеристики этого электропривода даны на рис. 15.11. Электропривод типа ИКР в этой схеме используется для получения характеристики In и для обеспечения бестоковой коммутации контакторов ускорения KM1V ... KM4V и динамического торможения КМ1 в цепи ротора. Характернстикн 2п ... 4п н 4с - обыч- ные реостатные характеристики двигателя, а на характеристиках 1с ... Зс двигатель работает в режиме динамического торможения с самовозбуждением. Бездуговая коммутация цепей статора достигается применением линейного контактора КММ с тиристорными блоками. При этом контакторы направления КМ1В и КМ2В отключаются с задержкой по отношению к контроллеру КММ, а при отключении контактов КММ ток переходит на шунтирующие их тиристоры, которые закрываются при переходе тока через ноль. Управление тиристорами осуществляет реле КН]. Управление тиристорами моста UZ1 электропривода типа ИКР в режиме бестоковой коммутации контакторов роторной цепи производится по цепи, состоящей из размыкающих контактов контакторов роторной цепи и контролирующих их реле КТ1, КТ2 и КТ5. При этом отключение этих контакторов происходит после отключения тиристоров моста. Питание цепи управления электроприводами ИКР производится от трансформатора Т2 и выпрямителя UZ4, а реле КТ6 выполняет контроль этой цепи. Для облегчения коммутации контактора КМ1 мост электропривода типа ИКР шунтируется силовым диодом. Для обеспечения характеристики In управление электроприводом типа ИКР производится от ЭДС ротора двигателя по цепи: выпрямитель UZ3, резисторы R2, R3, стабилитрон VD, выполняющий роль ключевого элемента, резисторы Р7 ... Р9, управляющие электроды тиристоров. Наличие указанной цепи обратной связи по ЭДС позволяет также исключить возможность аварийного режима - разрыва роторной цепи, возникновение которого возможно ввиду большого числа контактов в цепи управления тиристорами. При несрабатывании какого-либо контакта раскручивание вала двигателя приводит к включению стабилитрона и открытию моста электропривода ИКР. Подпитка двигателя в режиме динамического торможения выполнена от трансформатора Т1 и моста UZ2 н контролируется реле КПЗ. Помимо обычных видов защиты, в схеме имеет- 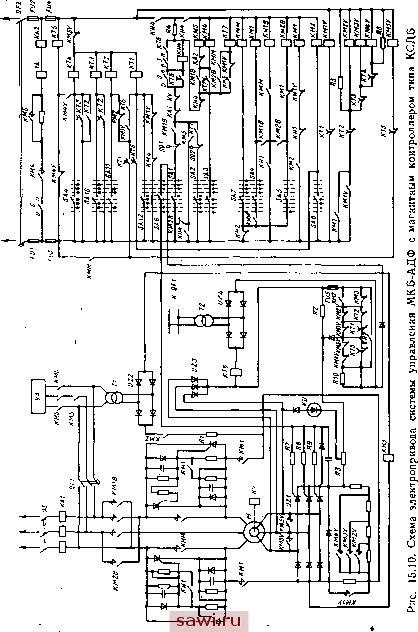 Установим охранное оборудование. Тел. . Звоните! | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||