
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Режимы работы кранов 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60
Рис. 15.11. Механические характеристики электропривода системы управления МКБ-АДФ с магнитным контроллером типа КСДБ ся защита от превышения скорости, выполненная с помощью центробежного реле KV- В остальном работа контроллера КСДБ аналогична работе контроллера ТСД. Система управления МКИ-АДФ для механизмов передвижении. Электроприводы с использованием импульсно- ключевого управления выполняют по различным схемам в зависимости от-предъявляемых требований. На рис. 15.12 приведена схема двухдвигательного электропривода с управлением от силового кулачкового контроллера ККТ-62А для кранов группы режима ЗК ... 5К. В этой схеме пм- 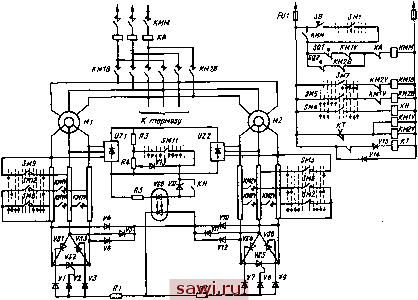 Рис. 15.12. Схема электропривода системы управления КИ-АДФ с кулачковым контроллером ККТ-61А Рис. 15.13. Механические характер истики электроприводов: - --- электропривод системы управления КИ-АДФ с кулачковым контроллером ККТ-61А; - - - - тормозная характеристика электропривода системы управления МКИ-АДФ с магнитным контроллером типа Б-6506 п/Пс -ifi-o,e-efi-e,4-o,z о о,г в,4 Цб о,а i,o и ia i,6 mIm пульсио-ключевое управление использовано для получения доводочных скоростей механизмов при диапазоне регулирования 1 : 10. Механические характеристики этого электропривода показаны на рис. 15.13. За исключением режима малых скоростей, схема аналогична схеме с обычным управлением от кулачкового контроллера. Контакты кулачкового контроллера выводят ступени резисторов в цепи ротора, а реверсирование двигателя осуществляется контакторами реверсора КМ1В и КМ2В. Импульсио-ключевые коммутаторы обоих двигателей выполнены по треугольным схемам иа тиристорах VS1 ... VS6. В состав узла управления контактором входят измерительные мосты UZ1, {/Z2 двигателей, элемент с регулируемым порогом срабатывания, выполненный на. стабилитроне VD, формирователь импульсов, выполненный иа оптроне VS8, распределители импульсов на диодах VI ... V3 и F7 ... V9 и сопротивлениях R], R2, выпрямляющие диоды, V4 .... V6, V10 ... VI2, делитель напряжения на сопротивлении R3 и потенциометре R4. Благодаря встречному включению выпрямителей на диодах V4 ... V6, У10 ... V12 сигнал управления поступает на тиристоры коммутатора того двигателя, .скольжение которого выше, а встречное включение мостов UZ1, UZ2 обеспечивает и управление коммутатором по скольжению того же двигателя. Благодаря этому в определенной степени достигается выравнивание частот вращения и нагрузок двигателя. Для получения характеристики 2 часть резистора потенциометра R4 шунтируется контактом контроллера SM11, и тем самым изменяется уставка скольжения двигателя. Контроллер обеспечивает пятипозиционное управление. При переводе рукоятки контроллера с любой позиции в первую механизм тормозится иа свободном выбеге. В нулевом положении накладывается механический тормоз, катушка электромагнита YA котс5рого подключена к входным зажимам обмоток статора двигателей. При необходимости возможно осуществить торможение в режиме противовключення переводом рукоятки контроллера в первое положение противоположного направления. При быстром переводе рукоятки контроллера в крайнее положение схемой предусмотрен автоматический разгон- по реостатной характеристике 2 благодаря задержке включения контакторов KM1V, KM2V, выполняемой с помощью реле времени КТ. При этом элемент с регулируемым порогом срабатывания шунтируется контактом реле КН, и сигналы управления на тиристоры коммутатора подаются постоянно до того момента, при котором коммутатор будет зашунтиро-ван контакторами. Защита привода, конечная и максимальная, вынесена на линейный контактор КММ. Контакторы и реле расположены на общей панели управления краном. Схема электропривода механизма передвижения с нмпульсно-ключевым управлением, разработанная для мостовых И козловых кранов общепромышленного назначения, показана на рис. 15.14. В отличие от схемы электропривода, показанной на рис. 15.12, в этой схеме автоматизированы режимы пуска и торможения и улучшена плавность торможения благодаря . обеспечению тормозной характеристики противовключення двигателя. Схема управления- коммутатора аналогична схеме управления с кулачковым контроллером. Этот электропривод имеет коммутатор на тиристорах VSI ... VS2, из- <>1 □ □ 5 N-f-- g гг,--- э - f V * 14м-- I а lit, 0\ г\ ---11 4-1- lr-b-i-1-, ii 1, f4s to (s> ча □ □ 7 %7
 5 Г! Г!! s a. мерительные мосты YD2, YDS, делитель напряжения на резисторе RS и потенциометре R4, элемент с регулируемым порбгом срабатывания на стабилитроне YD6, формирователь импульсов на оптроне VSS, распределитель импульсов на диодах YD4. Цепь статора подключается к сети контакторами КММ. Управление скоростью осуществляется контакторами ускорения 1КМ4 ... 1КМ7; 2КМ ... 2КМ7. На второй и третьей позициях командоконтроллера электропривод работает в импульсно-ключевом режнме; причем для получения характеристики 3 включаются контакторы 1КМ4, 2КМ4, выводящие часть сопротивления ротора н перестраивающие уставку скольжения изменением сопротивления потенциометра R4. На остальных позициях командоконтроллера осуществляется разгон двигателя по реостатным характеристикам 4, 5 при зашунтиро-ванном контакторами 1КМ5, 2КМ5 коммутаторе. Автоматизация пускотормозных режимов выполняется с помощью реле времени КТ1 ... КТ2. При возвращении рукоятки контроллера во второе - третье положения происходит свободный выбег. При переходе в первое положение (со 2--5-го положений) осуществляется торможение противовключением н ограничение скорости тормозного режима величиной ок 10 % номинальной (механические характеристики рис. 15.13, показанные штриховыми линиями). Поскольку рассматриваемая система обеспечивает глубокое регулирование скорости передвижения в двигательном н тормозном режимах, это положительное качество может быть использовано для сокращения зон, не обслуживаемых краном, и обеспечения кнопочного управления механизмами передвижения с пола. Для сокращения зоны в пределах выбега крана после срабатывания концевой защиты устанавливают дополнительно конечные выключатели SQ11, SQ12 на расстоянии 0,2 ... 0,4 м от упоров. Основные конечные выключатели SQ1 и SQ2 отключают механизм передвижения на расстоянии расчетного выбега при большой скорости. После этого на малой скорости при нажатой кнопке SB4 (SB5) кран может быть доведен до упора. Наряду с управлением с помощью командоконтроллера нз кабины может быть обеспечено кнопочное управление с пола. Для этого переключатель SA в кабине должен находиться в положении пульт . Контактами SB1 (SB2) кнопочного поста включаются двигатели привода передвижения, и кран движется на малой скорости, а контактор тормоза включается контактами SB11 (SB12) этого же поста. Для получения средней и большой скорости движения крана замыкаются контакты SB3 н SB13 кнопочного поста. Прн отпускании этой кнопки но нажатой кнопке SBl {SB2) происходит свободный выбег крана. 15.5. ЭЛЕКТРОПРИВОДЫ КРАНОВ, УПРАВЛЯЕМЫХ С ПОЛА Общие сведения. В машиностроении используется большое число мостовых кранов, работающих эпизодически либо с числом грузоподъемных циклов 6 ... 10 в час. Все большее число мостовых кранов используется с управлением с пола. Краны, управляемые с пола, должны иметь определенные ограничения рабочих скоростей и, как правило, должны быть снабжены системами с гарантированным регулированием скорости для обеспечения достаточно точного вывода груза на место установки. В соответствии с Правилами Госгортехнадзора рабочие скорости передвижения мостовых кранов должны быть не более 0,83 м/с, скорости передвижения тележки - не более 0,52 м/с. По условиям безопасности установки грузов краны без систем регулирования скорости должны иметь скорость подъема-опускания ие выше 0,06 м/с. Однако при этом резко снижается производительность кранов. Поэтому предпочтительной является наибольшая скорость подъема-опускаиня 0,11 ... 0,15 м/с с регулированием скорости 1:4-1:6. Краны, управляемые с пола, должны быть снабжены соответствующими площадками для осмотра н ремонта механизмов и электрооборудования. Систе- ма защиты электрооборудования крана должна быть построена таким образом, чтобы кран в аварийных условиях мог быть доведен до ремонтной зоны при управлении с пола и при отсутствии в схеме крана коротких замыканий и замыканий на землю. На кранах, управляемых с пола, автоматические выключатели не устанавливают. Защита главных цепей осуществляется фидерным автоматом питания главных троллеев, а защита цепей управления - плавкими предохранителями (сила тока 15 А, напряжение 380 В) при сечении проводов цепей управления 2,5 мм. Защята от перегрузок 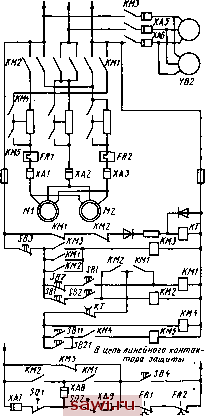  Рис. 15.15. Схема электропривода системы управления МК-АДК для управления с пола механизмом передвижения -100 -SO О 50 100 150 М,% Рис. 15.16. Механические характеристики электропривода системы управления МК-АДК для управления с пола механизмом передвижения электроприводов н механизмов осуществляется тепловым реле в главных цепях двигателей. Для возможности движения крана После срабатывания тепловой защиты контакты реле шунтируются кнопкой на пульте управления. На кране устанавливают сигнальные лампы наличия напряжения иа входе, напряжения после линейного KOHTairropa защиты и сигнальную лампу срабатывания тепловой защиты. Механизмы передвижения систем управления МК-АДК, МК-АДД. На рис. 15.15 показана схема электропривода механизма передвижения при управлении короткозамкнутым одно-скоростным двигателем. Эта схема предназначена для приводов тележек кранов грузоподъемностью 3 ... 20 т и приводов мостов кранов грузоподъемностью 2 ... 5 т. Обмотки статора ко-роткозамкнутого двигателя получают питание от сети через две ступени резисторов. Механические характеристики электропривода приведены на рис. 15.16. Управление электроприводом осуществляется от подвесных кнопочных постов. В управлении участвуют две основные двухходовые кнопки SB1 и SB2, дающие команду на движение в двух направлениях и переход на положение без регулирующих резисторов кнопками SB11 и SB21. При включении двигателя через контакты кон- Рис, 15.17. Схема электропривода системы управления МК-АДД для уцравлеиия электроприводом механизма передвижения крана с пола 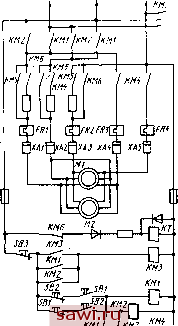 О -ЦП ГВ1 увг в цепь пинейного контактора защиты  МП--J.J7-i-J, троллеров KfAl, КМ2 подается питание на привод тормоза YB через контакты КМЗ. После отключения электродвигателя привод тормоза продолжает получать питание и механизм имеет свободный выбег. Для отключения тормоза используется кнопка SB3, общая для механизма тележки и моста. При срабатывании конечных выключателей SQ], SQ2 происходит отключение линейного контактора защиты, и механический тормоз накладывается. Для обеспечения электрического торможения противовключением после свободного выбега используется реле времени КТ с выдержкой времени 2 ... 3 с, задерживающее привод в положении с минимальньш пусковым (тормозным) моментом. На рис. 15.17 показана схема электропривода механизма передвижения крана и тележки с использованием двух-скоростного короткозамкнутого электродвигателя. Электродвигатель с двумя отдельными обмотками с соотношением числа полюсов 2р-4/12 или 2р-4/16 или 2р-6/16. Кнопками SB1 или SB2 включаются контакторы направления КМ1, КМ2, а также контактор малой скорости КМ4. После подачи питания к тихоходной обмотке двигателя через контактор КМЗ получает питание привод тормоза YB. Для перехода иа большую скорость двухходовыми кнопками замыкаются контакты SB11 (второе положение) и включается контактор К Мб; обмотка большой скорости подклю- Установим охранное оборудование. Тел. . Звоните! | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||