
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Режимы работы кранов 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 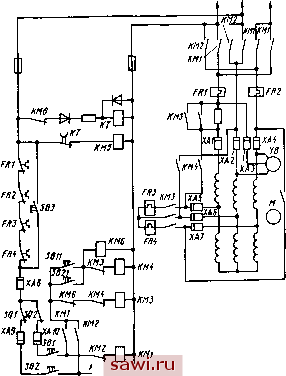 Рис. 15.18. Схема электропривода системы управления МК-АДД для управления меха-тМ* иизмом передвижения с пола на открытом воздухе чается к сети через резистор одновременно с тихоходной обмоткой. Затем тихоходная обмотка отключается. По истечении определенного времени (2 ... 5 с) реле КТ включается контактор КМ5, и двигатель выходит на естественную характеристику быстроходного режима. При отключении двигателя от сети привод тормоза продолжает получать питание и имеет место свободный выбег. Электрическое торможение может быть осуществлено при переходе с большой скорости на малую. Для отключения тормоза достаточно нажать кнопку SB3. При срабатывании конечной защиты при размыкании линейного контактора защитной панели происходит отключение электродвигателя и наложение механического тормоза. Механизм тормозится с максимальной интенсивностью. Благодаря применению резисторов в цепи быстроходной обмотки осуществляется плавный разгои йод контролем реле времени КТ, однако тормозной момент тихоходной обмотки не ограничивается, и в этом случае плавность торможения может быть достигнута несколькими импульсными включениями кнопки SB1, SB2. На рис. 15.18 показана схема механизма передвижения с использованием двухскоростного двигателя без свободного выбега. Эта схема отличается от рассматриваемой последовательным включением тихоходной и быстроходной обмоток и некоторым ограничением тормозного момента при последовательном включении обмоток. Схема рекомендуется для кранов, эксплуатирующихся иа открытом воздухе. Механизм подъема системы управления МК-АДД. На рис. 15.19 представлена схема управления электроприводом механизма подъема с использованием двухскоростного короткозамкиу-того электродвигателя с двумя независимыми обмотками с соотношением чк- 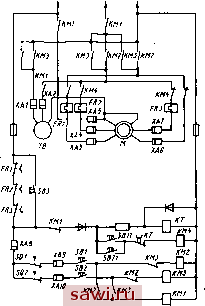 Рис. 15.19. Схема электропривода системы управления МК-АХ1Д, для управления механизмом подъема с пола сел полюсов 4/24 и 6/16. Схема выполнена по принципу двойного разрыва двумя независимыми аппаратами главной цепи обмоток электродвигателя и цепей привода тормоза, что обеспечивает необходимую надежность привода подъема. Тихоходная обмотка электродвигателя получает питание через контакты линейного контактора КМ1 и контактора К1Л4 после нажатия соответствующей кнопки SB1, SB2 (первое положение). При нажатии кнопки SBll (SB21) получает питание катушка контактора КМ4, происходит переключение с малой скорости иа большую при минимальном перерыве питания. При этом не может быть положения, когда быстроходная и тихоходная обмотки отключены. Переход с тихоходной обмотки на быстроходную происходит под контролем реле времени КТ: При срабатывании конечной защиты происходит двойное отключение обмоток двигателя и тормоза. На рис. 15.20 показана схема электропривода механизма подъема с двумя короткозамкиутыми электродвигателями, соединенными между собой и с редуктором через планетарную Передачу с передаточным числом 6 ... 8. Электродвигатель малой скорости включается на все время работы механизма. Электродвигатель большой скорости включается на время работы механизма при большой скорости. Электродвигатель малой скорости имеет встроенный тормоз. Электродвигатель большой скорости имеет отдельный тормоз с приводом от электрогидравлического толкателя. При нажатии кнопки направления SB1 (SB2) получает питание катушка контактора КМ4 и КМ5 и включается электродвигатель малой скорости. Одновременно включается общий линейный контактор КМ1 электродвигателя большой и малой скорости. При нажатии кнопки SB1 (SB2) до упора замыкаются контакты SB11 {SB2}), получает питание катушка контактора КМ6, но после того, как истечет время 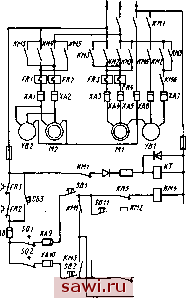 SS2I Umj ктЩкт Рис. 15,20. Схема электропривода механизма подъема с двумя электродвигателями при управлении с пола разгона на малой скорости под контролем реле КТ, включается двигатель большой скорости. При замедлении подъема или опускания груза после отключения двигателя большой скорости затормаживание до малой скорости осуществляется тормозом YB. После срабатывания конечных выключателей SQ1, SQ2 происходит отключение электропривода с двойным разрывом цепи двигателя и привода тормозов. Описанные схемы электроприводов обеспечивают включение механизмов крана при управлении с пола только при постоянном налатии на кнопку. При отключении любого вида защиты механизм останавливается независимо от состояния кнопочного аппарата управления. Схемы электроприводов (см. рис. 15.15-15.20) могут быть скомпонованы из стандартных магнитных пускателей типа ПМА, ПМЛ, реле РЭВ811 и блоков выпрямителей. 15.6. ЭЛЕКТРОПРИВОДЫ КРАНОВ С ТИРИСТОРНЫМИ ПРЕОБРАЗОВАТЕЛЯМИ И РЕГУЛЯТОРАМИ Электроприводы постоянного тока системы управления ТП-ДП. Тиристор-иые электроприводы постоянного тока применяют для крановых механизмов при необходимости обеспечения высококачественного регулирования при мощностях привода более 60 кВт. По регулировочным показателям система ТП-ДП близка системе Г-Д и обладает по сравнению с ией рядом преимуществ. Тиристорный электропривод практически вытеснил электроприводы по системе Г-Д на крановых механизмах. В настоящее время тиристориые электроприводы постоянного тока устанавливают на мощных мостовых и литейных кранах, перегружателях, бетоноукладчиках, на высокопроизводительных башенных кранах для высотного строительства и на ряде других уникальных крановых комплексах. Мощность электропривддов таких комплексов может составлять 400 ... 600 кВт. Рассматриваемые электроприводы, несмотря иа некоторое различие в построении отдельных узлов автоматики и защиты, выполнены на основе общих типовых схем с тиристорным преобразователем. К ним относятся схемы с реверсивными преобразователями серии АТРК и ТПЕ, с нереверсивными преобразователями серии АТК и кон-такторным реверсом. Для электроприводов напряженных режимов, и мощностью более 100 кВт следует применять схемы с реверсивными ТП. Для получения высоких регулировочных показателей в статике и динамике в электроприводах используют двухконтурные САР скорости. Рассматриваемые электроприводы в зависимости от назначения и исполнения крановых механизмов могут быть одно- и многодвнгательными. Электроприводы механизмов передвижения кранов обычно выполняют многодвигательными. Многодвигательные (обычно двухдвнгательные) электроприводы для механизмов подъема применяют при большой мощности системы. При этом схемы одно- или многодвигательных электроприводов почти ие отличаются друг от друга. Схема электропривода с реверсивным преобразователем, применяемая для механизмов подъема кранов с двухзон-иым регулированием скорости, показана на рис. 15.21. В зоне до номинальной скорости регулирование осуществляется изменением напряжения преобразователя, а в верхней зоне - изменением силы тока возбуждения двигателя. По силовой цепн двигателя САР является двухконтурной однократно интегрируемой, с внутренним .подчиненным контуром регулирования силы тока и внешним контуром, замкнутым По напряжению двигателя. САР по цепи возбуждения - одноконтурная, с подчиненным контуром регулирования тока возбуждения и регулированием потока в верхней зоне при подаче сигнала обратной связи по силе тока главной цепи. Механические характеристики, обеспечиваемые рассматриваемым электроприводом, показаны иа рис. 15.22. САР рассматриваемого электропривода обеспечивает качественное регулирование, являясь двухконтурной двукратно интегрируемой. Внешний контур в применяемой САР замкнут по ЭДС двигателя. САР возбуждения также выполнена двухконтурной с внутренним кон. Рис. 15.21. Схема электропривода системы управления ТП-ДП постоянного тока с тиристорным преобразователем АТРК 11 rfw- ---Nn туром регулирования тока возбуждения и внешним контуром регулирования ЭДС двигателя. Схема управления преобразователем включает блоки AV1, AV2 - системы нмпульсно-фазного управления силовым преобразователем UZ1 и преобразователем возбуждения UZ2, блоки А1 и А2 - САР преобразователей UZ1 и UZ2, логическое переключающее устройство из, переключающие тиристориые мосты силового преобразователя по сигналу от датчика тока UA воздействием на систему фазоимпульс-ного управления AV1 и блок переключения U2, блок токовой отсечки UF. Указанные блоки входят в преобразователь. Связь силового преобразователя UZ] с сетью осуществляется посредством силового дросселя L, а преобразователь возбуждения получает питание через трансформатор Т. В электроприводе с реверсивным преобразователем функции регулирования потока выполняет САР возбуждения. В схеме рнс. 15.21 цепь динамического торможения собирается только на нулевом положении командоконтроллера и при срабатывании любой защиты. Такой вариант включения динамического торможения требует высокого быстродействия системы и возможен только в электроприводах с реверсивными преобразователями. Электроприводы .с реверсивными преобразователями могут быть применены для. механизмов передвижения. Электроприводы с тиристорными регуляторами напряжения (ТРИ) в цепи статора системы управления ТРН-АДФ. Электроприводы с параметрическим регулированием скорости, выполняемым посредством тирнсторных регуляторов в цепи статора асинхронных двигателей. Применяют для механизмов. 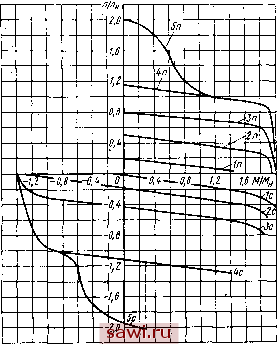 Рис. 15.22. Механические характеристики электропривода системы ТП-ДП постоянного тока с тиристорным преобразователем к которым предъявляют высокие требования относительно диапазона нли плавности регулирования скорости. В связи с выделением потерь скольжения эти электроприводы выполняют в основном с применением двигателей с фазным ротором при однозонном регулировании скорости в диапазоне 1 : 8. Регуляторы в ценя статора ко- . роткозамкнутых двигателей используют редко и только для формирования пусковых режимов. Такие электроприводы имеют простые сземы управления и здесь не рассматриваются. Рассмотрим выпускаемые промышленностью электроприводы с тиристорными регуляторами напряжения типа РСТ в цепи статора асинхронных двигателей. Эти электроприводы обеспечивают высокий диапазон (I : 10) регулирования скорости. Электроприводы с регуляторами напряжения позволяют формировать механические характеристики во всех четырех квадрантах регулирования со снижением потерь холостого хода машин, однако требуют установки тахометрического датчика скорости в имеют ухудшенные по сравнению с обычным реостатным регулированием энергетические показатели. Это связано не только с тем, что регулирование момента, осуществляемое снижением потока, приводит к увеличению потерь в меди обмоток, но и необходимостью применения для формирования тормозных характеристик нерационального режима противовклкГ-чения, ухудшением cos ф системы, а также наличием высших гармонических колебаний на кривой напряжения двигателя. Указанное особенно отчетливо проявляется в различных схемах с регуляторами напряжения, выполненными по несимметричным схемам. Поэтому такие схемы, несмотря на простоту, не получили широкого применения для крановых электроприводов. Электроприводы с ТРИ применяют для механизмов подъема и механизмов передвижения. Принцип построения схем этих электроприводов одинаков, 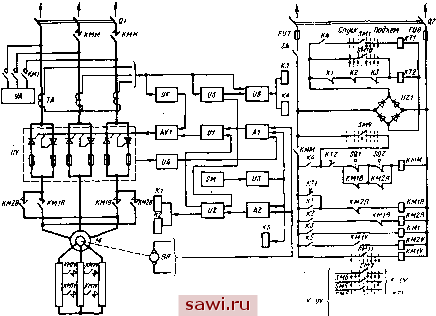
Рнс. 15.23. Схема электропривода управления ТРИ-АДФ с тиристорным регулятором напряжения типа РСТ отличия имеются только в выполнении отдельных узлов в цепях управления. Типовая схема электропривода механизма подъема с ТРИ типа РСТ приведена на рис. 15.23. Механические ха- рактеристики электропривода с ТРИ приведены на рис. 15.24. Пунктирные линии относятся к механизму передвижения. В ТРИ входят следующие блоки: AVI - система фазоимпульсио- -Фс 1,0 Рис. 15.24. Механические характеристики электропривода с тиристорным регулятором напряжения РСТ 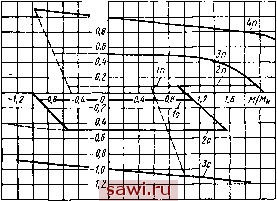 Установим охранное оборудование. Тел. . Звоните! |