
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Режимы работы кранов 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 16.4. Кратность максимального момента (Жтах/Лн) и перегрузка силы тока двигателей серии Д
где и - напряжение иа зажимах двигателя, В; - КПД двигателя; М = = 9,55С яТ1/п. Магнитный поток Ф создает МДС обмоток главных полюсов. С учетом выражений (16.1) и (16.2) механическая характеристика электродвигателя 60 / С/ 2ла Гя ,.\ ~ pN [ Ф pN ф2 где г - сопротивление цепи якоря двигателя. Ом. Из этой формулы следует, что частота вращения вала электродвигателя зависит от подведенного напряжения U, магнитного потока Ф и момента М иа валу двигателя. Полезный магнитный поток двигателя даже прн постоянной МДС полюсов несколько изменяется в зависимости от силы тока якоря, особенно при большой силе тока. Это явление, называемое размагничивающим действием реакции якоря, уменьшает магнитный поток главных полюсов. Поэтому при расчете механических характеристик необходимо использовать ие характеристику намагничивания машины, а нагрузочные характеристики, которые построены для зависимости Ф = = f (МДС) при различных значениях силы тока якоря. Мощность Электрической машины постоянного тока, выраженная через геометрические размеры, где Оя - диаметр якоря, см; / - эффективная длина пакета якоря, см; А - линейная нагрузка. А/см; Вд - индукция в воздушном зазоре, Т; a - коэффициент расчетной полюсной дуги двигателя; a = 0,6ч-0,68. Для крановых электродвигателей оптимальное отношение IjDa - 0,85-=--т-1,15. Лииейиая нагрузка якоря в зависимости от режимов работы А = = 260Н-370 А/см. Рекомендуемые значения индукций .фи конструировании электродвигателей в воздушном зазоре Вд = 0,6-Н -Ь0,8 Т; в зубцах якоря В ,3 = 1,7-г- -=-2,0 Т. , Двигатели серии Д исполнений 12 ... 32 при номинальном напряжении в течение 30 с и двигатели исполнений 41, 806 ... 818 в течение 60 с должны выдерживать перегрузку силы тока, указанную в табл. 16.4. Электродвигатели серии Д выполнены с использованием якорей десяти различных диаметров и имеют 13 исполнений по основным параметрам, причем электродвигатели трех исполнений имеют две различные длины. Двигатели серии Д предназначены для грузоподъемных машин, в том числе металлургических. Для механизмов с большим числом включений (до 1000 в час) группы режима 6М для повышения динамических показателей приводов и уменьшения расхода энергии для разгона якоря используют тихоходные двигатели с относительно невысокой номинальной частотой вращения. Для механизмов с числом включений 120 ... 240 в час группы режима 4М ... 5М предусмотрены быстроходные двигате- ли Д21 ... Д808, частота вращения которых иа 30 ... 50 % превышает частоту вращения двигателей первого типа. Двигатели характеризуются повышенной кратностью Пусковых и максимальных моментов. Номинальное напряжение 220 и 440 В. Вид возбуждения - последовательный, параллельный, параллельный со стабилизирующей последовательной обмоткой и смешанный. По способу монтажа двигатели серии Д имеют основное исполнение 1М 1001 с двумя свободными концами вала. Кроме того, двигатели Д12 ... Д32 имеют нсполненне 1М 2011, а двигатели Д12 ... Д808 - исполнение 1М 2001. Вертикальное исполнение 1М ЗОИ имеют двигатели всех габари. 16.5. Характеристика электродвигателей серии Д прн номинальном режиме 60 мии
Быстроходные двигатели
16.6. Характеристика электродвигателей серии Д при ПВ = 40 %
Тихоходные двигатели
Быстроходные двигатели
тов. При этом в их обозначении вводится буква В (например, двигатель ДВ-812). Степень защиты основных крановых исполнений - 1РЗЗ с кожухом 1Р10 для механической защиты выводных зажимов. Станины двигателей исполнений до 808 включительно - неразъемные. Станины двигателей Д810 ... Д818 - разъемные. Для всех обмоток двигателей применяется только изоляция класса И. Номинальные параметры электродвигателей в режиме работы 60 мин и ПВ = 40 % приведены в табл. 16.5 и 16.6. Двигатели серии Д рассчитаны на регулирование частоты вращения путем ослабления магнитного потока или изменения напряжения на якоре. Тихоходные двигатели параллельного возбуждения со стабилизирующей обмоткой допускают увеличение частоты вращения в 2,5 раза по сравнению с номинальной путем уменьшения силы тока возбуждения. При максимальной частоте вращения вращающий момент не должен превышать 0,8 номинального режима 60 мин при напряжении 220 В и 0,6 номинального режима при напряжении 440 В, Двигатели напряжением 220 В допускают увеличение частоты вращения в 2 раза по сравнению с номинальной благодаря повышению напряжения. При этой частоте вращения и номи- нальном возбуждении максимальный момент не должен превосходить 1,5 номинального режима 60 мин. Максимальное напряжение на зажимах двигателей по отношению к заземленным частям не должно превосходить 600 В. Для двигателей всех систем возбуждения допускается в двигательном и генераторном режимах увеличение частоты вращения до максимальной (см. табл. 16.5). При этом сила тока якоря не должна быть более 0,7 номинальной силы тока (режим 60 мин) для тихоходных двигателей. Основные размеры двигателей приведены в табл. 16.7. Расчет Механических характеристик электродвигателей постоянного тока. Исходные данные: напряжение на зажимах якоря двигателя в функции тока якоря определяют известными способами; сопротивление обмоток якоря и добавочных полюсов Ля;, способ возбуждения и МДС; значение МДС в функции силы трка якоря. Расчет механических характеристик ведется в относительных единицах: n-=/(M-; /.). Задаются силой тока якоря в относительных единицах /я, определяют величину vl = (/я/(/н и МДС главных полюсов; f*=H+Vo/k, где fн - МДС независимой обмотки возбуждения в относительных единицах; Kt - коэффициент возбуждения последовательной обмотки; для двигателей последовательного возбуждения /Се = 1; для двигателей смешанного возбуждения Се = 0,35; для двигателей параллельного возбуждения со стабилизацией /Се = 0,1. По характеристикам (рис. 16.1) находят относительное значение магнитного потока Ф в функции F* и /я- 16.7. Размеры (мм) электродвигателей постоянного тока Серии Д ho lUJI 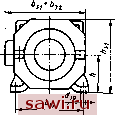
Фи КО 0.6 0,6 о 0,г (7,4 (7,15 (7,# 1,0 и /, Рис. 16.1. Универсальные нагрузочные характеристики электродвигателей серии Д: / - У = о; 2 - = 0,5 3 - Постоянный коэффициент частоты вращения С. = 1-Гя.н Частота вращения для заданного /я С/н 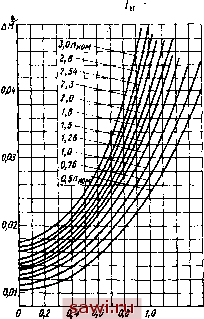 Рис. 16.2. Универсальная номограмма потерь холостого хода С*ф* По найденным значениям Ф* и rt* и номограмме потерь холостого хода (рис. 16.2) находим S.M* и момент иа валу двигателя М* = 1,03/*Ф* =F AM*, где знак - - режим двигателя; знак + - режим электрического торможения. Затем строят зависимость л* = = / (М*). 16.3. ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА Основные параметры асинхронных электродвигателей переменного тока имеют следующие обозначения: М - вращающий момент иа валу, Н-м; - мощность, подведенная к статору, кВт; Рг - мощность иа валу электродвигателя, кВт; /i - сила тока статора, А; л- частота вращения, мии ; / - частота питающей сети, Гц; р - число пар полюсов обмотки статора; mi - число фаз обмоткн статора; Л1пуск - пусковой момент иа валу двигателя, Н-м; Мцшх - макснмаль- ный момент на валу электродвигателя, Н-м; Ti - сопротивление фазы статора. Ом; Хо - индуктиииое сопротивление намагничивания (холостого хода), Ом; XI - приведеииое к статору индуктивное сопротивление ротора, Ом; Ф - магнитный поток, Вб; ttij - число витков фазы статора; /Co6i - коэффициент обмотки статора; % - номинальное скольжение ротора электродвигателя. Мощность, подведенная к статору двигателя и иыражеииая через геометрические размеры, 1/2-60 где£) - диаметр ротора, <м;1- длина ротора, см; А - лииейиая плотность тока. А/см; iBfl - индукция в воздушном зазоре, Т. Мощность, подведенная к статору н выраженная через электрические параметры. Pi = V2 nmi/i*/aii/(o6 1 cos ф 10-s. При этом магнитный поток электродвигателя 4.44MJCo6r По номинальным данным электродвигателей могут быть определены параметры для расчета механических характеристик: критическое скольжение Sk (при максимальном моменте) где Мн - номинальный момент элеи-тродвигателя, Н-м; Ма = ЭббОРгня. Максимальный момент 0,079т, где к = - 1 + -i/Cq + 4)- Полное сопротивление короткого за мыкания где /in - пусковой ток двигателя;, /Чпуек /н % cos фп = cos Фн L /Wh I + 0,33/1п н (1 - Т1н) ш 1 - % при наличии параметров и cos фд можно рассчитать величины резисторов для ограничения пусковых моментов и построения характеристик регулирования моментов. Необходимый пускоиой момент при измеиеииом сопротнилеиии гки- к = 2к cos Фп;, н 2 sin фц. Добавочное сопротивление рваистора Крановые электродвигатели переменного тока серии 4МТ. Стаиииы электродвигателей всех типов (кроме электродвигатели 4МТ 112) изготовлены из чугуна с ребрами для охлаждения и клеммовой коробкой, расположенной в верхней части. Стаиииы электродвигателей 4МТ112 выполнены из алюминиевого сплава. Щиты двигателей изготовлены нз чугуна, а крышки подшипников большинства двигателей - из алюминиевого сплава. Сердечник статора набирают из покрытых лаком штампованных листов из горячекатаной или холоднокатаной стали толщиной 0,5 мм. Контактные кольца выполнены из спеченных медных композиций или из профильной меди (медных труб). Во избежание скопления щеточной пыли между кольцами имеется свободное воздушное пространство. Дли двигателей с высотой Центра 112 ... 280 мм применяют щетки Ml. Щетки Ml имеют размеры 8X12, 5X32 мм при высоте 112... 132 мм; 10X25X32 мм при иЫсоте 160 мм; 12,5X32X40 мм при высоте 200 ... 225 мм; 16X40X50 мм при высоте 250 мм. Щетки MF имеют размеры Установим охранное оборудование. Тел. . Звоните! | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||