
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 Механические импульсные передачи в импульсных бесступенчатых передачах в отличие от других видов передач энергия передается не непрерывно, а в виде периодических импульсов. Обычно вращательное движениеХведущего вала у этих передач преобразуется в колебательное движение, которое с помощью механизмов свободного хода (МСХ) вновь трансформируется во вращательное движение, но уже ведомого вала. Механизм, преобразующий вращательное движение ведущего вала передачи в колебательное движение звена, жестко связанного с ведущим звеном МСХ, называют преобразующим механизмом. В качестве преобразующих механизмов в импульсных передачах применяют различные рычажные, зубчато-рычажные и кулачковые механизмы. Известны преобразующие механизмы гидравлического и электрического действия. В случае привода от двигателей с колеблющимся ротором необходимость в -преобразующем механизме отпадает и колебательное движение непосредственно передается ведущему звену МСХ. В импульсных передачах применяют чаще всего роликовые МСХ с цилиндрическими или эксцентриковыми роликами, реже зубчатые (храпрвые), с эксцентриковыми кольцами, пружинные, клиновые и др. Наиболее простые системы импульсных передач (редукторов и вариаторов), состоящие из одного преобразующегс механизма и одного МСХ, встречаются в приводах поДачи металлорежущих и деревообрабатывающих станков, прессов, кузнечных и иглопробивных машин, транспортеров, дозаторов, лубрикаторов, домкратов, монтажных ключей и приборов. В указанных импульсных передачах преобразование качательного движения ведомого звена преобразующего механизма в однонаправленное движение ведомого вала передачи посредством МСХ осуществляется при использовании движений этого звена только в одном направлении и, следовательно, ведомый вал аовершает либо прерывистое вращательное движение, либо при большой частоте импульсов и значи- тельном приведенном моменте инерции движущихся масс ведомой части привода непрерывное вращательное движение с большой неравномерностью. Чтобы получить непрерывное вращение ведомого вала и уменьшить неравномерность его вращения, устанавливают несколько последовательно работающих преобразующих механизмов иМСХ; причем, как правило, эти механизмы включаются в работу через равные промежутки времени (сдвинуты на одинаковый фазовый угол). Регулируемые от руки импульсные вариаторы применяют в Приводах главного движения и подач[1 металлообрабатывающих станков, в приводах конвейеров в легкой промышленности, питателей хлопкоочистительных машин, в текстильном, пищевом, продовольственном, медицинском машиностроении ив других отраслях техники. Импульсные механические вариаторы состоят из двух основных мехацизмов: механизма, посредством которого передается энергия от.ведущего вала к ведомому, и механизма, регулирующего передаточное отношение. Первый называют механизмом главного движения, а второй - регулирующим механизмом. Импульсные передачи бывают в виде, планетарных систем и систем с неподвижными осями. . В зависимости от вида преобразующего механизма и его кон-, структивного выполнения все импульсные передачи можно разделить на рычажные и, кулачковые, а вариаторы еще на зубчато-рычажные. Внутри каждой из этих групп имеются разновидности: в рычажных - плоские и пространственные шарнирные и кулисные; в кулачковых - с качающимся толкателем, с поступательно движущимся толкателем, коноидные с пространственными механизмами; в зубчато-рычажных - зубчато-шарнирно рычажные, зубчато-кулисные, зубчато-кулачковые. Конструктивно-импульсные передачи могут быть выполнены несоосными и соосными, при этом первые конструктивно проще, чем вторые. Регулирующие механизмы вариаторов за счет перемещения положения подвижных или неподвижных шарниров на хбду и под нагрузкой изменяют либо длину одного из звеньев преобразующего механизма, либо положение точки его поворота и тем самым изменяют амплитуду колебания ведущего звена МСХ. Перемещение неподвижных шарниров достигается относительно простыми рычажными, винтовыми и зубчатыми механизмами, в то время как регулирование перемещения подвижных шарниров без остановки вариатора приводит к системам, представляющим сочетание различных видов передаточных механизмов. Кроме того, у подавляющего большинства импульсных вариаторов (прежде всего общемашиностроительного назначения) имеется, несколько преобразующих механизмов, и йЬэтому регулирующие механизмы должны синхронно изменять амплитуду колебания ведомых звеньев всех преобразующих механизмов. Все это усложняет си-в стему и койструкцию регулирующихтаеханизмов, которая у некоторых вариаторов становится более сложной, чем механизм главного движения. В силу цикличности работы вариаторов и импульсивности движения должно быть предотвращено самопроизвольное поворачивание звеньев регулирующего механизма после настройки вариатора, что достигается установкой в конструкции механизма фиксирующих, стопорящих устройств Или применением самотормозящихся систем. РЕДУКТОРЫ На ряду с главным назначением импульсных редукторов - в приводах машин, где импульсивность движения способствует повыше- HHib качественных и количественных показателей выполняемых технологических процессов, их можно успешно применять в приводах многих других машин (горных, дорожно-строительных, пищевых, сельскохозяйственных и др.) в качестве редукторов с боль- , шим передаточным отношением (80-100 и более). Такие редукторы имеют относительно простое устройство, высокий КПД (0,92), весьма компактны, а наиболее совершенные конструкции достаточно долговечны, даже при работе МСХ с частыми включениями (до 25-50 гц). Как показали экспериментальные исследования импульсных редукторов [621, с изменением нагрузки вследствие деформации звеньев преобразующего механизма и МСХ изменяется передаточное отношение редуктора. Такое изменение особо ощутимо у редукторов с большим передаточным отношением, у которых угловая скорость валов в зависимости от передаваемых крутящих моментов может изменяться в 1,5-2,5 раза, что указывает на возможность использования некоторых видов импульсных редукторов, как саморегулирующихся систем. Редуктор, показанный на рис. 1, является прототипом современной импульсивной передачи. При равномерном вращении кривошипа I коромысло 2, жестко связанное с наружной обоймой 5 МСХ, передает периодические движения ведомому валу 4. При движении коромысла по часовой стрелке ролики заклиниваются между обоймой 3 и валом 4, и последний получает вращательное движение. При обратном движении коромысла ролики освобождаются, и вращение ведомого вала прекращается. Но так кк этот вал получает вращение не от одного такого механизма, а от шести, причем кривошипы этих  Рис. 1 механизмов закреплены на ведущем валу по отношению друг к другу под углом 60°, то вращение ведомого вала становится непрерывным и достаточно равномерным. Редуктор общемашиностроительного назначения (ОТИПП им. М. В. Ломоносова) показан на рис. 2. Вал приводного фланцевого двигателя 14 непосредственно соединен с ведущим валом 7, несущим два эксцентрика2 с насажен- ными на них игольчатыми подшипниками 3, наружные кольца которых сопрягаются с сухарем коромысла 5, приваренного к наружной звездочке 6 роликового МСХ с большим числом роликов 7. Внутренняя обойма 8 МСХ закреплена неподвижно на ведомом валу 9. Силовое замыкание коромысел с эксцентриками осуществляется пружинами 10. Звездочки и обоймы МСХ центрируются посредством щек 11, 12 и 13, выполненных из антифрикционного материала. Часть роликов МСХ с левой стороны не имеет прижимных устройств и находится в постоянном контакте с обоймами под действием сил тяжести. Вращение ведущего вала и эксцентриков вызывает колебательное движение коромысла, которое преобразуется роликовым МСХ в непрерывное в одном направлении вращательное движение ведомого вала. Передаточное отношение редуктора может достигать 120 и более. Равномерность вращения ведомого вала можно изменять путем изменения числа преобразующих механизмов и МСХ. Редуктор высокой нагрузочной способности (ОТИПП им. М. В. Ломоносова) показан на рис. 3. Ведущий вал 8 имеет два эксцентричных участка а, периферийные части которых использованы в качестве беговых дорожек внутренних обойм игольчатых подшипников 7, помещенных в паз кулис 4, последние приварены к наружным звездочкам 2 МСХ. С целью повышения долговечности редуктора звездочки оснащены вставками 1 из твердого сплава Т15К6, а рабочие поверхности паза кулисы выполнены на закаленных вставках 3 и 5. Паз кулисы имеет очертание по окружности, благодаря чему достигается более совершенный контакт наружных обойм игольчатых подшипников с рабочими поверхностями кулис при передаче крутящего момента ведомому валу 6 (контакт со вставкой 3). При этом менее совершенный контакт обойм со вставками 5 происходит в период свободного движения, когда н€ передаются крутящие моменты для преодоления сил сопротивления. Чтобы передача усилий от ведущего вала к ведомому через кулисный механизм осуществлялась при угле давления, равном 90°, кулисы приварены к наружным звездочкам МСХ несимметрично. Редуктор с большим передаточным отношением показан на рис. 4. Пространственные кулачки 5 с торцовой рабочей поверхностью, имеющие на периферии зубья, получают вращение от шестерни 6 ведущего вала 7. От кулачков через шарики 9 получают 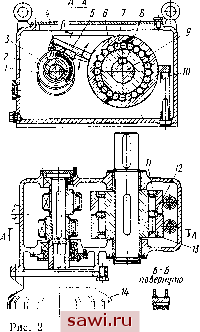 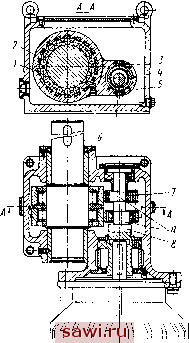 Рис. 3 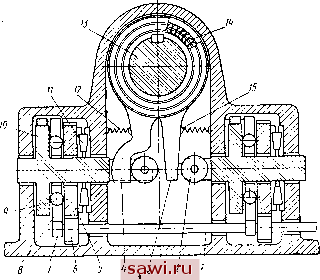 Рис. 4 Установим охранное оборудование. Тел. . Звоните! |