
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 Если бы шатуны 10 были непосредственно присоединены к кривошипу ведущего вала, то получился бы обычный храпоюй механизм, и тогда за каждый оборот кривошипа ведомый вал провора- чивался бы на вполне определенный угол. Между ведущим и ведомым валами в этом случае установилось бы вполне определенное передаточное отношение, которое оставалось бы неизменным для различных крутящих моментов на-ведомом валу. .Соединение шатунов 10 с ведущим валом через балансирный рычаг при наличии маятника позволяет автоматически изменять передаточное отношение в зависимости от величины крутящего момента на ведомом валу. Рассмотрим движение механизма с момента, когда кривошип занимает крайнее правое положение, а маятник, соответственно, крайнее левое. В последующий период маятник движется с положительным ускорением; при этом к маятнику через тягу 4 передается усилие, которое уравновешивается одним из шатунов 10. В данном механизме максимальное ускорение маятника наблюдается в начале хода, поэтому сила, действующая на маятник со стороны тяги, будет наибольшей в начале его движения вправо. - В период первой половины хода маятник получает разгон и накапливает кинетическую энергию. В течение второй половины хода он движется замедленно и отдает накопленную энергию; при этом балайсирный рычаг работает как двуплечий рычаг с осью вращения на кьнце шатуна (шарнир а). Мощность, развиваемая маятником в этот период, передается на ведомый, вал через МСХ. Динамическая сила, развиваемая массой маятника, увеличивается с увеличением угловой скорости кривошипа. При малой угловой скорости кривошипа крутящий момент на~ ведомом валу может оказаться недостаточным для преодоления момента сил сопротивлелия. В этом случае передние концы шатунов 10 будут оставаться неподвижными, а маятник будет качаться с максимальной амплитудой. С увеличением частоты вращения ведущего вала крутящий момент, создаваемый, на ведомом валу, возрастает, и когда он станет больше момента сил сопротивления, ведомый вал начнет вращаться; при этом концы шатунов 10 совершают возвратно-поступательное движение. По мере увеличения хода этих шатунов амплитуда колебаний маятника уменьшается. При определенной частоте вращения кривошипа угол качания коромысел, а следовательно, частота вращения ведомого вала будут тем меньше, чем больше момент сил сопротивления на ведомом валу. Таким образом, в данном механизме передаточное отношение изменяется автоматически в зависимости от нагрузки и частоты вращения коленчатого вала двигателя. На рис. 24 показана конструкция автоматической импульсной автомобильной коробки передач, предложенная проф. В. И. Заславским. 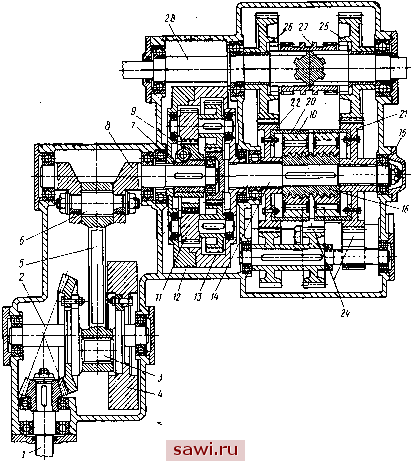 Вращение от вала двигателя 1 через коническую зубчатую передачу и через кривошипно-коромысловкй механизм, состоящий из деталей 2, 3, 4, 5 и 6, передается солнечному зубчатому колесу 7 планетарной передачи, закрепленному на коленчатом валу 8. Ось сателлитов и 13 установлена в подшипниках, смонти-Рис. 24 рованных в массивном водиле 12. На валу 14 заклинены второе солнечное колесо 9 и внутренние обоймы 16 двух МСХ. Наружные обоймы 10 этих МСХ соединены с зубчатыми колесами 21 и 22; последние находятся в постоянном зацеплении с зубчатыми колесами 25 и 26, а также соединены между собой посредством четырех паразитных шестерен 24. При помощи кулачковой муфты реверса 27 зубчатые колеса 25 (прямого хода) и 26 (обратного хода) соединяются с ведомым валом 28 передачи. Здесь вращательное движение вала двигателя преобразуется с помощью кривошипно-коромыслового и планетарного мехайизмов в колебательное движение вала 14 и затем выпрямляется MGX в непрерывное вращательное движение вала 28. За один оборот вала / вал 14 получает два импульса. МСХ распо ложены так, что если при правом качании вала 14 заклинивается правый механизм и Движение через зубчатую передачу 21-25 3. 67 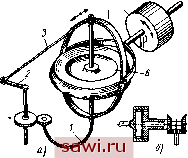 передается ведомому валу 28 (кулачковая муфта 27 включена на прямой ход), то в период левого качения заклинивается левый механизм и движение от зубчатого колеса 22 через паразитные шестерни 24 передается зубчатому колесу 21 и далее ведомому валу 28 в том женаправлении. Таким образом, за каждый оборот вала / вал 28 получает два импульса в одном и Том же направлении. В зависимости от сопротивления на ведомом валу изменяется, амплитуда колебания водила 12, а это, в свою очередь, ведет к автоматическому изменению среднего передаточного отношения передачи. На рис. 25, а показана инерционная передача, в которой автоматизм основан на использовании гироскопического эффекта. Двигатель приводит гироскоп 6 посредством гибкого вала / во вращательное Движение и одновременно с помощью рычажного механизма 2, 3, 4 колебательное движение в плоскости, проходящей через ось вращения гироскопа. Под действием гироскопического момента гироскоп совершает колебания той же частоты в плоскости, перпендикулярной к первой и точно так же проходящей через ось вращения гироскопа. Гироскоп установлен в центре тяжести системы с помощью карданного подвеса. Колебательное движение передается на ведомый вал импульсивно посредством двух роликовых МСХ 5. Оба механизма заклиниваются попеременно, имея противоположное расположение заклинивающихся поверхностей на ведомых обоймах. Для обеспечения вращательного движения ведомого вала в одном направлении ведомые обоймы соединены между собой конической передачей, как показано на рис. 25, б. МСХ в сочетании с конической передачей являются выпрямителями или трансформаторами, преббразующими вторичное колебательное движение во вращательное движение ведомого вала. При изменении нагрузки на ведомом валу автоматически меняется амплитуда колебаний гироскопа, что приводит к изменению передаточного отношения передачи. Типичным представителем автоматической импульсной передачи, работающей на принципе использования центробежных сил инерции, является коробка передач с неуравновешенными сателлитами, применявшаяся в грузовых автомобилях большой грузоподъемности (рис. 26). Вал 3 двигателя соединен с маховиком / (рис. 26, а), на котором закреплены пальцы 7 сателлитов 5, находящихся в зацеплении с центральным зубчатым колесом 2, непосредственно соединенным с карданным валом 6 автомобиля. Рис. 25 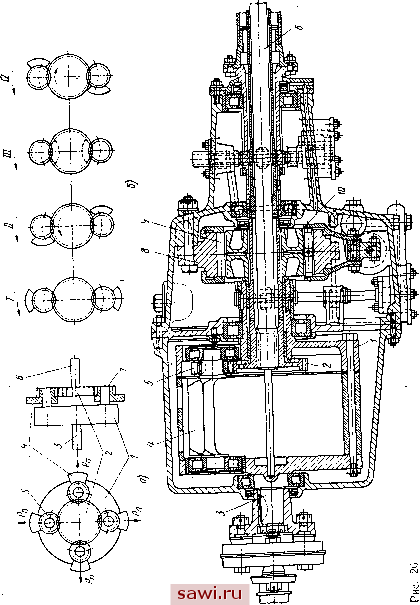 с каждым сателлитом жестко соединено массивное эксцентричное звено 4. - При малой частоте вращения вала двигателя зубчатое колесо 2 вследствие сопротивления движению колес автомобиля остается неподвижным, и сателлиты обкатываются вокруг него. Центробежные силы инерции Р сравнительно невелики и мало препятствуют качению сателлитов. В этом случае двигатель может работать, не будучи рассоединенным с трансмиссией при неподвижном автомобиле. При увеличении частоты вращения маховика увеличиваются центробежные силы инерции, которые стремятся затормозить сателлиты на осях, тем самым вызывая вращение зубчатого колеса 2. - Чтобы представить действие центробежных сил, преодолевающих момент сопротивления на ведомом валу при его вращении, рассмотрим характерные положения звена 4. Если этоЗвено занимает положение (рис. 26, б), то центробежные силы передают зубчатому колесу 2 положительный момент, который стремится вести его в том же направлении, в каком вращается маховик. Когда звено 4, минуя положение /, при котором момент сил Рп равен нулю, будет располагаться сортветственно положению IV, зубчатому колесу 2 передается отрицательный мо- мент центробежных сил, который будет стремиться вращать его в обратном направлении. Величина плеча,* накотором действуют на сателлит центробежные силы, при ювороте сателлита изменяется от нуля (положение]/) до максимального значения и затем, переходя через нуль (положение /), снова возрастает в отрицательной области изменения момента. Таким образом, зубчатое колесо 2 получаетпоследовательно знакопеременныеимпульсы с периодами, зависящими от частоты вращения сателлитов и их числа. МСХ, состоящий из деталей 8, 9 я 10 (рис. 26, в), выпрямляет знакопеременный момент, т. е. обеспечивает получение выходным валом импульсов только одного направления. Момент, развиваемый центробежными силами эксцентричных звеньев, изменяется пропорционально квадрату скорости. Если этот момент равен или больше момента сопротивления, то будет получена прямая передача и тогда сателлиты и зубчатое колесо 2 вращаются как единое целое. Если момент от центробежных сил . меньше момента сопротивления, то центробежные силы не в состоянии удержать сателлиты неподвижно а опорах, и они начнут враш,аться, уменьшая частоту вращения зубчатого колеса 2, а следовательно, увеличивая передаточное отношение привода. При этом изменение передаточного отношения происходит до того момента, пока не наступает равенство моментов центробежных сил и сил сопротивления. Передача допускает автоматическое изменение частоты вращения ведомого вала от нуля до частоты вращения вала двигателя в зависимости от сопротивления движению автомобиля и частоты вращения вала,двигателя. На рис. 27 показана ймйульсная автоматическая коробка передач, во многом схожая с предыдущей. Зубчатое колесо /, закрепленное на коленчатом валу 2, приводит во вращение сателлиты 4 с эксцентрично прикрепленными грузами. При вращении сателлиты сообщают водилу S импульсы. Водило вначале повернется в направлении вращения вала 2, а затем в противоположном направлении. Следовательно, водило должно совершать колебательное движение. Импульсы в одну строну передаются на фланец 12, а от него через МСХ 10 я И на шайбу 5 ведомого вала 7 . Импульсы же в обратном направлении передаются через правый 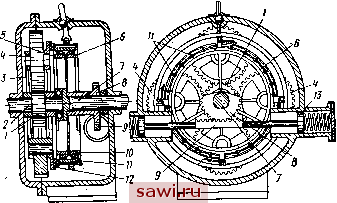 Рис. 27 МСХ шайбе 6 и зубчатому колесу 8, которое через рейку 9 передает импульсы поршням 13 пружинного катаракта. В этой передаче точно так же, как и в предыдущей, передаточное отношение изменяется автоматически с изменением нагрузки и частоты вращения вала двигателя. Существенное развитие получили инерционные импульсные передачи с неуравновешенными сателлитами благодаря интенсивным теоретическим и экспериментальным исследованиям этих передач группой ученых Челябинского политехнического института (ЧПИ). - Заслуживает внимания разработка схем с рядами неуравновешенных сателлитов (рис. 28). При вращении ведущего вала / на оси неуравновешенных сателлитов 2 и 3 действуют центробежные силы инерции и Р 2, создающие на ведомом звене - водиле 4 момент, изменяющийся по полигармоническому закону. Число-гармоник момента равно числу неуравновешенных сателлитов. Путем изменения масс грузов и их взаимного расположения, а также диаметров сателлитов и их числа можно изменять в широких пределах амплитудные значения момента и закономерности его изменения, что позволит расширить возможности применения Установим охранное оборудование. Тел. . Звоните! |