
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 При действии положительного Момента центробежных сил промежуточный вал разгоняется до частоты вращения ведомого маховика, и после включения МСХ происходит совместный разгон с маховиком и передача энергии на ведомый вал. При действии отрицательного момента центробежных сил промежуточный вал затормаживается до полной его остановки, отдавая накопленную энергию ведущим элементам, в то время как ведомый вал вращается за счет кинетической энергии, накопленной маховиком 5. Средний момент, передающийся на промежуточный вал, зависит от частоты вращения ведущего вала, массы грузов, радиуса центра тяжести и эксцентриситета эксцентриков. Момент же, развиваемый на ведомом валу, зависит от его частоты вращения и момента инерции промежуточного вала с насаженными на него деталями.- Общим для рассмотренных инерционных передач является изменение пульсирующих моментов, сил инерции, благодаря чему достигается их автоматическое действие. В передачах, принцип действия которых основан на использовании тангенциальных сил инерции, изменение нагрузки вызывает изменение амплитуды колебания массивного звена, что влечет за собой автоматическое изменение передаточного отношения привода. > В передачах, построенных по принципу использования центробежных сил инерции, изменение нагрузки вызывает изменение плеча действия центробежных сил эксцентрично вращающихся деталей или частоты вращения и, следовательно, приводит к изменению величины знакопеременных моментов от этих сил, передаваемых через МСХ на ведомый вал. Неотъемлемой частЬю импульсной передачи является МСХ, Несмотря на то, что за последнее время сделаны большие успехи в области улучшения конструкций МСХ, эти механизмы все же подвержены наибольшим напряжениям в цепи передачи. Поэтому при проектировании инерционных импульсных передач особое внимание должно быть уделено выбору основных параметров МСХ. Наиболее ответственные элементы этих механизмов должны быть тщательно рассчитаны. Неправильно спроектированный МСХ может вызвать большие потери на трение или привести к быстрому износу обойм и искажению рабочих поверхностей их в местах койтакта с роликами, что ведет к выходу механизма из строя. Наиболее приемлемыми оказались роликовые МСХ с цилиндрическими или эксцентриковыми роликами, обладающие рядом преимуществ по сравнению с другими видами МСХ. Роликовые МСХ имеют минимальный угол поворота обойм при заклинивании; что очень важно при создании импульсных вариаторов с жесткой характеристикой. Тяжелые условия функционирования МСХ в системе импульсных инерционных передач (частые/включения, большие динамические нагрузки) предъявляют повышенные требования к их долговечности. Из всего разнообразия роликовых МСХ этому требованию наиболее удовлетворяют многороликовые механизмы с цилиндрическими роликами и звездочками, оснащенными твердыми сплавами (см. гл. 12, рис. 20), и с эксцентриковыми роликами волнообразной формы (см. гл. 12, рйс. 23) или с обоймами, имеющими овальную рабочую поверхность (см. гл. 12). Попытки изменить конструкцию механизма с целью уменьшения сосредоточенного износа деталей введением дополнительных клиньев между роликоми и ведущей деталью (передача проф. В. И. Заславского, см. гл. 12, рис. 6) успеха не имели, так как увеличилось число кинематических пар и возникли дополнительные потери на трение. Глава 3 КИНЕМАТИКА ПЕРЕДАЧ ЗУБЧАТО-РЫЧАЖНЫЕ ВАРИАТОРЫ Механизм главного движения зубчато-рычажного импульсного вариатора является наиболее типичным, поэтому приведенные ниже исследования во многом можно распространить на другие системы, в которых заменяющий преобразующий механизм представляет собой шарнирный четырехзвенник. Кинематическая схема механизма главного движения вариатора показана на рис. 1. Все пять двухповодковых групп АВО присоединены к одному общему кривошипу OA, являющемуся ведущим звеном передачи. Коромысла ВО приводят в движение посредством МСХ ведущие зубчатые колеса z-i, через которые движение передается центральному зубчатому колесу ведомого вала. Преобразующий механизм ОАВО представляет собой шарнирный кривошипно-коромысловый механизм, звеньями которого являются: кривошип ОЛ = г - эксцентриситет пазового диска 16 (см. гл. 1, рис. 29); шатун АВ = - средний радиус диска 16; коромысло BOi = - длина коромысла ; стойка 00 = - расстояние между осями зубчатых колес. Ведомый вал получает вращение через МСХ и зубчатую передачу поочередно от всех пяти колеблющихся коромысел ВО (см. рис. 1). Вращение ведомому валу в каждый момент времени передает только то коромысло, у которого направление вращения соответствует направлению, при котором МСХ заклинивается, а угловая скорость превышает угловые скорости всех других коромысел. Условимся в дальнейшем считать положительным направление .угловой скорости коромысел, при котором происходит заклинивание, а противоположное направление - отрицательным. Таким образом, в каждый момент времени движение ведомому валу передает коромысло, имеющее наибольшую положительную скорость, все же остальные в этот промежуток времени вращаются свободно вокруг своих осей. Так как в цепи механизма главного движения имеются МСХ, допускающие передачу вращения только в одном направлении, то 80 импульсные бесступенчатые вариаторы в большинстве случаев нереверсивны. Скорость элементов передачи. Рассмотрим отдельно один кривошипно-коромысловый механизм ОАВО (рис. 2, а). Скорость точки Л кривошипа 2ят, где fii об/мин - постоянная частота вращения кривошипа, равная частоте вращения вала Двигателя. По скорости построим из точки О, как из полюса, повернутые планы скоростей в масштабе кривошипа, а также годограф скорости Vb точки В в том же масштабе (штриховая кривая К). Масштаб скорости р, = (Oip , 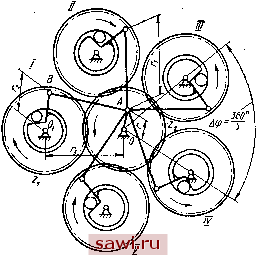 Рис. 1 где \x,s - масштаб чертежа механизма; ©i - угловая скорость вала двига.теля. По годографу скорости Vq строим график q изменения величины этой скорости в зависимости от угла ф в полярных координатах, принимая за полюс точку О. Так как угловая скорость коромысла ©а = - > этот график будет изображать также график изменения угловой скорости коромысла в функции угла ф в масштабе На основании того, что графики ©а (ф) коромысел сдвинуты один относительно другого на фазовый угол Лф = --ичто каждым коромыслом движение передается только в тот период, когда его угловая скорость положительна и превышает угловую скорость остальных, построена диаграмма изменения угловой скорости со ведомого вала в зависимости от угла ф в тех же полярных координатах. Углрвая скорость ведомого вала со = = 1 где - передаточное отношение зубчатой передачи; и числа зубьев ведущего и ведомого зубчатых колес  Следовательно, масштаб диаграммы На рис. 2, а положительное направление угловой скорости коромысла совпадает с направлением угловой скорости кривошипа (прямой ход коромысла). В период прямого хода за время поворота кривошипа на угол Аф осуществляется рабочее движение каждого коромысла. При изменении направления вращения кривошипа (вала двигателя) направление положительной угловой скорости коромысла будет противоположным направлению угловой скорости кривошипа (обратный ход коромысла). Ведомый вал вращается в одну и ту же сторону при любом направлении вращения ведущего вала. На рис. 2, брабочее движение коромысла происходит в период обратного хода. Здесь теми же методами построена диаграмма-о)ф изменения угловой скорбсти ведомого вала в функции угла ф. Диаграммы о) (ф) и о (ф) показывают, что за один оборот ведущего вала угловая скорость ведомого вала периодически изменяется столько раз, сколько имеется двухповодковых групп и зубчатых колес Zj в системе механизма. Колебание угловой скорости со может быть определено величиной Асо = со ах- шш- (5) Из сопоставления графиков, показанных на рис. 2, видно, что величина колебаний угловой скорости при прямом ходе коромысла и при обратном не одинакова, т. е. Ак( < Асо. Следовательно, более равномерное движение ведомого вала получается для прямого хода коромысла. Приведенные графики построены для механизма, имеющего следующие размеры звеньев, мм: г = 13; = 57,5; Га = 26; Гд = 54. Положения кривошипа 0-1 и 0-16, соответствующие крайним положениям коромысла, не лежат одно против другого. Поэтому периоды прямого и обратного ходов коромысла различны. Будем называть такой механизм асимметричным в отЛичие от симметричного механизма, у которого положения кривошипа в крайних положениях коромысла находятся под углом 180° и периоды прямого и обратного ходов коромысла одинаковы. По имеющимся исследованиям [5] наименьшие колебания угловой скорости получаются у симметричного механизма. Передаточное отношение вариатора. На рис. 3 показана схема шарнирного четырехзвенника механизма ОЛБО, и зубчатого механизма вариатора. Мгновенное передаточное отношение  Рис. 3 В течение одного цикла движения ведомого вала i изменяется в соответствии с изменением угловой скорости о (см. рис. 2). Передаточное отношение h = , (6) где - передаточное отношение между кривошипом OA и ведущим коромыслом ОВ. Установим охранное оборудование. Тел. . Звоните! |