
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 Из треугольника ОАЬ, изображающего пбвернутый плай скоростей шарнирного четырехзвенника ОАВО, в масштабе кривошипа имеем г sin (г) 4- а) Ob ~ sin (ф - а) где 06 = Подставляя значение Ob в выражение (7), получ ] /-2 sin (г) 4- а) sin i) cos -- cos г) sin г sin (ф - а) г sin ф cos а - cos ф sin а ИЛИ, выражая sin а и cos а через соответствующие функции углов Ф и я]), будем иметь Га Гз sin г) - /- sin (ф + г)) г Гз sin ф -/ 2 sin (ф + г)) Передаточное отношение можно определить проще графическим методом. Продлим направления кривошипа и шатуна до пересечения в точке 0 и проведем из точки О прямую, параллельную шатуну АВ, до пересечения с коромыслом в точке С. Точка Оа является мгновенным центром вращения шатуна, и, следовательно а АО, ВО- Так как Va = со/; Vb = СОаГа, Кроме того, АО. г SC Подставляя последнее соотношение в выражение (9), получим / - 2 и ВС (10) На рис. 3, б показано построение Для определения величины ВС при обратном ходе коромысла. Если принять, что в период рабочего движения коромысла то получим приближенное выражение для передаточного отношения передачи (11) Наибольший практический интерес представляет среднее передаточное отношение i, которое можно определить, если обратиться к рис. 2, а. Как видно при повороте кривошипа на угол Аф = 360° = -g-, коромысло ОВ, а следовательно, и ведущее зубчатое колесо повернутся на угол Aif; ведомый вал при этом повернется на угол Аф/гг. Все пять механизмов за один оборот ведущего вала, очевидно, повернут ведомый вал на угол, равный Отношение угла поворота ведущего вала к углу поворота ведомого вала дает среднее передаточное отношение передачи или просто передаточное отношение передачи 5Аг) Передаточное отношение для k коромысел (12) (13) Чтобы определить углы поворота коромысел Ая]) и Аф в период рабочего движения при прямом и обратном ходе, из крайних точек Ai и Ла дуги окружности, стягивающей центральный угол Аф (см. рис. 2, а), найдем методом засечек точки Bi и В, определяющие дугу окружности, соответствующую углу Ая]). Аналогично определяем величину угла Ая]). Из сравнения углов следует, что Ая1 < Ая]), т. е. передаточное отношение прямого хода больше, чем обратного, а это значит, что. для асимметричного механизма при обратном ходе частота вращения ведомого вала больше, чем при прямом. Это свидетельствует о необходимости предусмотреть в конструкции передачи указатель направления вращения ведущего вала. Определение числа ведущих зубчатых колес и числа зубьев. Число ведущих зубчатых колес z, а следовательно, число муфт свободного хода и коромысел* определяется из условий сцепляе-мости/этих шестерен с центральной шестерней z ведомого вала. Шестерни могут находиться s зацеплении при наличии зазора между окружностями головок смежных ведущих зубчатых колес 1 и 2 (рис. 4). Минимальный зазор 2а между окружностями головок зубчатых колес / и 2 определяется точностью изготовления их и МСХ, точностью расточки гнезд подшипников качения и их взаимного расположения. Условие сцепляемости зубчатых колес передачи: 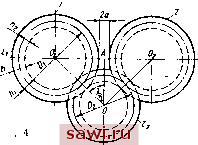 ОА 00 sin (14) мальных размерах зубьев получим Выражая ОЛ и 0\0 через число зубьев колес и Zg. и модуль зацепления т, при нор- 0,A = f- + h, + a = 0,0 = 4-(d, + d,) = (2, + .,). Примем а = цт,-где fx - некоторый коэффициент. Угол ~Y можно определить из выражения (15) где k - число зубчатых колес z, находящихся в зацеплении с центральным зубчатым колесом z. Подставляя найденные значения в неравенство (14), получим 2о > :i[l-sm(-)]+2(4 + 180° sin {180°/k) (16) (17) На рис. 5, а показаны графики изменения z в функции Zj, соответствующие выражению (16), принятому как равенство, а на рис.5, б - графики изменения передаточного отношения /г зубчатой передачи в зависимости от z, построенные по выражению (17), принятому за равенство. Как видно из этих, графиков, с увеличением k увеличивается передаточное отношение i, а с увеличением Zj величина уменьшается. При < 5 Zi > Zg, гг < 1; (18) при > 5 Zi < Zj, гг > 1- (19) Очевидно, что при <: 5 возможно зацепление и при > 1. Если сопоставить зубчатые механизмы с различными k, имеющие одинаковые межосевые расстояния, то с увеличением k уменьшаются их габаритные размеры (уменьшается число зубьев Zi 70 60 50 0 30 20 10
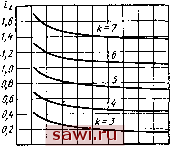 10 20 30 W 50 во 70 60 90 г, а) о 10 20 30 iO 50 60 70 ЪО 90 Z, S) Рис. 5 ведущего колеса). Однако при значениях,>5 размеры колес Zi определяются габаритными размерами внутренней обоймы и роликов МСХ, размещенных внутри этого колеса (см. гл. 1, рис. 29). Если считать радиальные размеры внутренней части МСХ одинаковыми для значений > 5 (различие в этих размерах незначительно), то из неравенств (18) и (19) мОжно заключить, что при = 5 зубчатый механизм при одном и том же модуле будет иметь меньшие габаритные размеры, чем при k > Ъ. Выясним влияние k на максимальную частоту вращения ведомого вала: где 1 - частота вращения вала приводного электродвигателя. об/мин; I минимальное передаточное отношение передачи. Выразив imin по формуле (13), получим (20) Если принять и Aifmax не зависящими от к, то ах будет увеличиваться с увеличением k. В действительности же возрастает вместе с k (см. рис. 5), а Aij) убывает. В итоге отношение - max 87 растет быстрее, чем k, и поэтому является убывающей функцией k. Итак, диапазон регулирования вариатора можно увеличить за счет уменьшения k, однако это приведет к снижению равномерности движения ведомого вала. В практике проектирования зубчато-рычажных импульсных вариаторов как объектов общемашиностроительного назначения принята компромиссная величина /г = 5. Снижение неравномерности вращения ведомого вала путем увеличения > 5 приводит к существенному уменьшению диапазона регулирования. Ниже приводятся величины, которые показывают, в какой мере изменяются и максимальная частота вращения Пщах (об/мин) ведомого вала в зависимости от k при частоте вращения вала приводного двигателя Пх = 1440 об/мин: при = 5 t i = 1,44; шах = 1000; при = 6 i , = 1,97; п, = 730; при = 7 I- = 2,54; п 570. Таким образом, при fe = 5 передача будет иметь большой диапазон регулирования, будет наиболее компактной и, кроме того, более простой по конструкции вследствие меньшего числа ведущих зубчатых колес, МСХ и коромысел по сравнению с передачами имеющими/ fe > 5, несмотря на то что при fe > 5 несколько увеличивается равномерность вращения ведомого вала передачи, а при < 5 увеличивается диапазон регулирования. Для fe == 5 22 0,72i + 4,1 или (21) (22) В существующих конструкциях I > > 0,78. На основании известной зависимости, определяющей межосевое расстояние зубчатой передачи, и неравенства (16) получим Га sin () - т- а и для fe = 5 . 2 (0,588гд -т - а). (23) (24) Межосевое расстояние а, = Гз и модуль зацепления т определяются обычными расчетами на выносливость рабочих поверхностей зубьев с учетом циклической нагрузки. Число зубьев ведомого колеса 2, = 2лз т ВАРИАТОРЫ С КАЧАЮЩЕЙСЯ КУЛИСОЙ В импульсных вариаторах нашли применение механизмы с качающейся кулисой и несимметричным ее размахом относительно линии, соединяющей неподвижные шарниры кривошипа и кулисы. Это объясняется главным образом наличием на ведущем валу вариатора нескольких кривошипов, сдвинутых на фазовый угол и койструктивно выполненных в виде эксцентриков. , После замены у преобразующего механизма вариатора (см. гл. 1, рис. 7) высшей пары низшими этот механизм может быть представлен эквивалентным кулисным механизмом с качающейся кулисой (рис. 6). Угол поворота if кулисы в зависимости от угла поворота ф кривошипа определится Ф = 1 + % = arctg ;fj + arctg ;-2 (/ &)2 4 2алcos ф (25) где а -длина стойки 001; г - длина кривошипа; / - длина звена АВ; Ь- длина отрезка Оф. После дифференцирования последнего выражения по времени и преобразования угловая скорость кулисы определится аг cos ф -h к a2 ;.2 j.2aлcosф аг (I (26) аг (I - Ь) sin y(Oj + (да + /-2 + 2аг cos ф) .2 (/ ь) j 2агсоъ ф где coi - угловая скорость кривошипа. Если направляющая кулисы при своем продолжении проходит через центр вращения, то Ь == О и кулисный механизм имеет наиболее выгодный угол передачи у - 90°. Если же длина I - О, то получится центральный кривошипно-кулисный механизм, для которого угловая скорость кулисы определится аг cos ф + (27) к -а22 2а/-со8ф При наличии ползуна кулисного механизма, у которого шарнир смещен на величину /, угловая скорость кулиСы, как следует Установим охранное оборудование. Тел. . Звоните! | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||