
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 МСХ, в результате построения положений преобразующего механизма, соответствующих этим углам, находим величину угла Aj). Среднее передаточное отношение при наличии трех преобразующих механизмов ЗАг) (40) При движении ведомого вала с остановками среднее передаточное отношение (41) где - угол размаха кулисы, определяемый в зависимости от 7гла а поворота регулировочного кулачка. ПЛАНЕТАРНЫЕ ВАРИАТОРЫ Вариатор с вращающимся эксцентриком. Кинематическая схема вариатора (см. гл. 1, рис. 32) показана на рис. 12. Движение передается От кривошипа / коромыслу 2 и затем через роликовый МСХ сателлиту Zi, который обкатываясь по неподвижному центральному зубчатому колесу Zj, приводит в движение водило 3, установленное на ведомом валу вариатора. Преобразующих механизмов сателлитов и МСХ в системе вариатора k (на схеме показано два), они расположены вокруг центрального колеса раЁномерно под углом Аф = 2я = и приводятся в движение от одного кривошипа. Угловая скорость сателлита 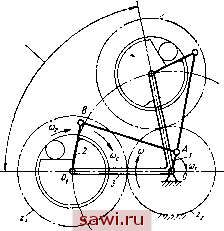 (42) Рис. 12 где 0) - угловая скорость водила ведомого вала; cog - угловая скорость сателлита относительно водила (угловая скорость коромысла при неподвижном водиле). Воспользовавшись принципом обратимости движения с учетом выражения (42), запишем (О = 2 Так как вала Ш, - (о , то мгновенная угловая скорость ведомого 1 + iiiz - 1 1 + 1и (43) где ii2 - передаточное отношение между кривошипом и коромыслом; 1и - передаточное отношение, определяемое по уравнению (8). Среднее значение этой частоты за цикл движения механизма вариатора с ие-, пользованием выражения (13). =т4+Ы или приближенно, используя выражение (И), получим wl/- (45) где г и г2 - длины кривошипами коромысла. Диапазон регулирования частоты вращения ведомого вала о mir max шах + Г  Рис. 13 Из этого выражения видно, что на всем диапазоне регулирования вариатор работает в редукторном режиме. Вариатор с неподвижным эксцентриком (см. гл. 1, рис. 36). На рис. 13 показана кинематическая схема рассматриваемого вариатора, где в качестве преобразующего механизма применен двухкривошипный шарнирный четырехзвенник ОАВО с регулируемым передаточным отношением за счет изменения длины г стойки 1. Водило 3 (ведущий кривошип) несет ось звездочки роликового МСХ, которая неподвижно соединена с шатуном 2 и периодически соединяется с сателлитом z при заклинивании МСХ, когда ее скорость относительно водила превыщает. относи-.тельную угловую скорость сателлита. Второй кривошип 4 преобразующего механизма представляет фиктивное звено, равное по длине среднему радиусу пазового диска (см. гл. 1, рис 35). Как и в предыдущих конструкциях, таких совокупностей механизмов в системе вариатора несколько, они расположены равномерно вокруг центрального ведомого зубчатого колеса Zg. is принципа действия вариатора (см. стр. 42) и кинематической схемы следует, что передача движения от водила центральному ведомому зубчатому колесу га возможна толькори заклиненном МСХ; при этом совмесАюе движение сателлита и звена 2 4 в. Ф. Мальцев 97 относительно водила вызывает дополнительное движение зубчатого колеса в направлении, противоположном действию момента сопротивления М, т. е. в направлении угловой скорости ведомого вала, Данный вариатор при одном направлении движения водила (электродвигателя) может работать как мультипликатор, а при другом в редукторном режиме. Этого же эффекта можно достигнуть путем изменения направления относительной угловой скорости сателлита и звездочки МСХ при заклинивании за счет применения роликовых реверсивных МСХ [61]. Если у механизма вариатора (см. рис. 13) водило движется против часовой стрелки с угловой скоростью со, то угловая скорость ведомого вала 0) = (0 4~ где Юг - угловая скорость звена 2 совместно с сателлитом (МСХ заклинен) относительно водила, изменяющаяся в течение цикла движения. Так как со = (46) где - переменное передаточное отношение между звеньями / и 2 при неподвижном водиле. Средняя величина угловой скорости при использовании формулы (13) будет = <o.(.+-4f). ,47) а приближенное значение с учетом формулы (И) . (48) В этом случае диапазон регулирования вариатора со -н со (1 -f ---j, соответствует мультипликаторному режиму работы, а когда со = (о (длина стойки г = 0), вариатор работает в режиме муфты. Максимальная величина угла размаха Атршах звена 2 в рабочий период относительно водила чаще всего лимитируется углом передачи шарнирного четырехзвенника в обращенном движении. При вращении водила по часовой стрелке движение от него к ведомому зубчатому колесу, как следует из кинематической схемы, возможно только, если минимальная угловая скорость 2 rain звена 2 в относительном движении больше относительной угловой скорости сателлита. Аналогично, как и в предыдущем случае, угловая скорость ведомого вала и соответственно средняя угловая скорость а также приближенное значение Направление вращения ведомого вала не может изменяться, в противном случае МСХ не заклинится и вариатор потеряет работоспособность, а поэтому на основании уравнения (49) должно быть (49) (50) (51) - 1 >0 или 12 шах < (52) 12 шахг 2 Последнее неравенство указывает, что вариатор работоспособен при ограниченном диапазоне изменения tia- При больших значениях Ila. соответствующих малым значениям г вследствие незаклинивания МСХ, вариатор теряет способность передавать движение от ведущего звена - водила к ведомому звену - зубчатому колесу Zg. Диапазон регулирования вариатора при рассматриваемом направлении движения водила будет Таким образом, при выполнении неравенства (52) вариатор будет работать в редукторном режиме на всем диапазоне регулирования. Если в конструкции вариатора сателлиты расположены в одной плоскости и необходимо выдержать условие их совместимости, то, как показали исследования при минимальном угле передачи Yjjjjjj = 45°, неравенство (52) выполняется только, когда k \. Вариатор Харьковского филиала НИИХИММАШа. Кинематическая схема вариатора показана на рис. 14, а (конструктивная схема показана в гл. 1 на рис. 34). Из схемы видно, что в кольцевой канавке ведущей шайбы / размещено несколько пар роликов 2. Последние входят попарно в пазы сепаратора 3, расположенного между ведущей и ведомой шайбами. Ведомая шайба 6 имеет точно такую же кольцевую канавку. Ролики 5, находящиеся в кольцевой канавке ведомой шайбы 6, также попарно заключены в ряд пазов сепаратора 3. Если ролики 2 и 5 собраны так, как показано на рис. 14, а, то рабочее движение роликов 2 и свободный ход роликов 5 совпадают с направлением угловой скорости ©i. 4* 99 Ось вращения сепаратора может быть смещена относительно оси вариатора поворотом эксцентриковой втулки 7. Эксцентриситет сепаратора изменяется от О до /дах- На рис. 14, б показан заменяющий механизм главного движения вариатора, состоящий из . двух кулисных механизмов, имеющих общий корпус и кулису 3 (сепаратор на рис. 14, а). С целью удобства в дальнейшем будем называть: половину механизма, состоящего из звеньев /, 2, 5 и 4, прямым кулисным 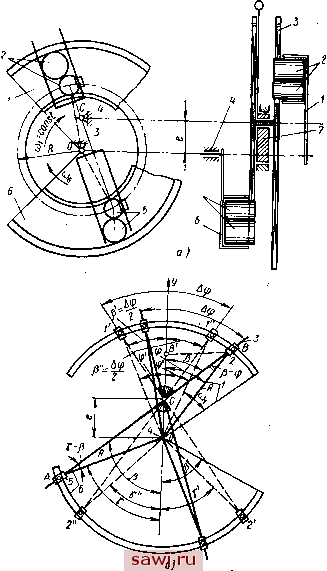 Рис. 14 механизмом; вторую половину механизма, состоящего из звеньев 3, 4, 5 и 6, обратным кулисным механизмом. Так кйк вся система механизма состоит из последовательно соединенных двух кулисных механизмов, то полное среднее передаточное отношение вариатора равцо произведению средних передаточных отношений прямого и обратного кулисных механизмов: i = iih, где tl - среднее передаточное отношение между звеньями / и 3 прямого кулисного .механизма; - среднее передаточное отношение между ведомым звеном 3 и звеном 6 обратного кулисного механизма. Дополнительно примем следующие обозначения: . Ф - угол поворота ведущего звена /; Р - угол поворота сепаратора 3; V - угол поворота ведомого звена 6; ф - угол поворота ведущего звена, соответствующий моменту заклинивания роликов2; ф - угол поворотд ведущего звена, соответствующий расклиниванию роликов 2; и Р - углы поворота роликов 2 вместе с сепаратором 3, соответствующие углам ф и ф ; y - угол поворота роликов 5, соответствующий моменту зайлинивания в пазу (диска) 6; у - угол поворота роликов 5, соответствующий моменту расклинивания; т - число парроликов, размещенных в каждом диске; R - расстояние от оси ведущего вала О до центров роликов, расположенных с внутренней стороны пазовых дисков> Прямой кулисный механизм. Из треугольника ОСВ sin (р - ф) sin Р (53) Если обозначить -4- = - основной параметр преобразую-щего механизма вариатора, то получим sin ф cos ф - X Дифференцируя уравнение (54) по времени, найдем (54) (cos ф - X) cos ф -f sln ф cosp dt или, зная, что (COS ф - Х)2 будем иметь WiC0s2p(l -lC0S(f) (COS ф - Установим охранное оборудование. Тел. . Звоните! |