
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 Используя формулу (53у, найдем мгновенное передаточное отношение t от звена / к звену 3 (прямой кулисный механизм): i = = 1 4- -2Xcosip to, I - X cos ф (55) Без учета угла \ относительного поворота элементов МСХ в процессе заклинивания момент заклинивания будет определяться точкой /, а момент расклинивания точкой 1 . При этом углы Углы 9 = -- + arcsin(sin-£-); Ф = -arcsinfXsin-v (56) Угол сдвига Дф двух соседних пар роликов Аф - ф - ф = --2arcsinf;isln-v (57) Итак, величина фазового угла Аф зависит от величины т и X. Среднее передаточное отношение прямого кулисного механизма можно представить как отношение углов поворота ведущего звена / и сепаратора 3 на участке /-/ (рис. 14, б): i = Ф -Ф Аф 1 Р Р - р а с учетом формул (56) и (57) ii=,l-arcsin(;isin-). (58) Если число пар роликов относительно велико (например т = = 12), то угол - принимает небольшие значения, и тогда можно принять ti 1 - Я,. Рассмотривая обратный кулисный механизм из треугольника ОСА (см. рис. 14, б), имеем sin (у-Р) / , sin р - - Y = р -Ь arcsin {X sin р). Заклинивание роликов 5 определяется положением 2, а расклинивание-положением 2 . Для данных положений углы и р определяются по формулам (56), а значения у viy - по формуле (59): = arcsin (sin-); v = + arcsin(Xsin-). Среднее передаточное отношение г- у -у ~ + - arcsin I X, sin - I или приближенно 1 Полное среднее передаточное отношение вариатора I = = arcsin (А- sin- I я \ т J 1-4--- arcsin я или приближенно in Я, sin (60) (61) Из формул (60) и (61) следует, что когда эксцентриситет сепаратора равен нулю (Х = 0), передаточное отношение i = I, т. е. ведомый вал вращается как единое целое с ведущим. При всех других значениях 1, больших нуля, t < 1 и, следовательно, без дифференциального механизма передача является ускорительной. ВАРИАТОР С КАЧАЮЩЕЙСЯ ШАЙБОЙ На рис. 15, а показана кинематическая схема вариатора (см. гл. 1, рис. 26), где преобразующий механизм представляет собой пространственный рычажный механизм с качающейся шайбой. Ведущий вал / приводит в движение качающуюся шайбу 2, перемещающую в осевом направлении подпружиненные плунжеры 5, несущие на конце ролики 4, которые перекатываясь по наклонному пазу ротора 5, приводят ротор, соединенный неподвижно с ведомым валом, во вращательное движение. Благодаря наличию МСХ вращение передается только в одном направлении. Если обозначить: R - расстояние осей плунжеров от оси ведомого вала; v -~ У - наклона шайбы; ф - угол поворота шайбы, то согласно схеме движения плунжеров и наклонной шайбы (рис. 15, б), приняв за начало отсчета угла ф крайнее правое положение плунжера, можно определить его осевое перемещение у. При повороте шайбы на угол ф конец плунжера, соприкасающийся с шайбой, переместится в осевом направлении на yDE-AB R tgv-i? tgYcosф = tg у (1 - cos ф), (62) и, следовательно, осевая скорость плунжера V = R igy (Hi sin ф, где Ml - угловая скорость ведущего вала. 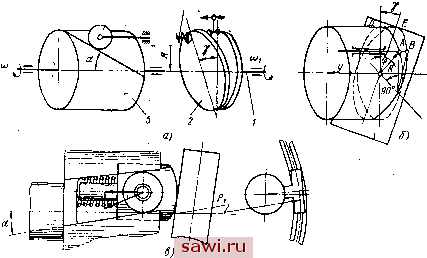 Рис. 15 Зная осевую скорость плунжеров v, угол а наклона паза ротора, расстояние средней линии ролика от оси ротора (см. рис. 15, в), найдем угловую скорость ведомого вала со =JiЖi= tgYtgasinфCDl (63) и передаточное число вариатора W tg Y tg а sin ф (64) Если число плунжеров и соответственно число МСХ равно k, то угловая скорость со ведомого вала и передаточное число \ будут изменяться периодически за каждый угол поворота шайбы При этом угол ф изменяется в диапазоне от начала заклинивания МСХ ДО момента его расклинивания. Из уравнений (63) и (64) можно заключить, что данная конструкция вариатора позволяет изменять неравномерность движения ведомого вала посредством изменения угла а и радиуса R в функции ула ф. Первое можно достигнуть изменением формы паза ротора, а второе за счет формы рабочей поверхности шайбы и опорной поверхности толкателя [72], [73]. В более общем случае передаточное отношение tgT (Ф) tg [а (ф)] sin ф (65) При регулировании угловой скорости ведомого вала вариатора теоретически минимальная величина (0 = 0 при у = 0. В действительности, как показали опыты с другими системами импульсных вариаторов, они теряют работоспособность (периодически останавливаются) при больших конечных значениях i, когда со >0. Реальная минимальная угловая скорость ведомого вала вариатора определится из равенства (63): min = - itg Yшlntgasin(ф), (66) где Y j, - минимальный угол наклонной шайбы, при котором вариатор нормально функционирует (движение при постоянной неравномерности). Величина этого угла определяется экспериментально. На основании выражения (71) кинематический диапазон регулирования (67) 2 ) Цтах . Ушах <ш1п 7mln Как следует из уравнения (63), максимальная угловая скорость ведомого вала при проектировании вариаторов может быть увеличена за счет увеличения отношения углов у и а, угловой скорости вала электродвигателя со. Однако все эти величины огра-ничены. Отношение < 1 практически остается постоянным, имея тенденции к небольшому увеличению с увеличением радиальных размеров ротора. Величины углов y иа не должны превышать соответственно предельных углов передачи в механизме с наклонной шайбой и в пространственном кулачковом механизме с ведущим толкателем. Все это указывает на то, что рассматриваемые вариаторы могут работать в диапазоне малых частот вращения ведомого вала (п = 0-90 об/мин). Угловая скорость ограничивается условием непрерывности контакта толкателя с шайбой. При больших значениях coi и угла y возможны отрывы толкателей от шайбы, что неизбежно приведет либо к значительному сокращению импульса, передаваемого ведомому валу со сторсшы ведущей части механизма вариатора, либо к пропуску импульсов отдельными толкателями. Как в первом, так и во втором случае резкр возрастут динамические усилия и возможно соударение элементов механизма. Глава 4 РЕГУЛИРУЮЩИЕ МЕХАНИЗМЫ ЗУБЧА ТО-РЫЧАЖНЫХ ВАРИАТОРОВ в вариаторах общемашиностроительного назначения регулирующие механизмы конструктивно увязываются с механизмом главного движения. Они разнообразны по принципу действия, конструктивному выполнению и воспроизводят различные законы изменения передаточного отношения привода в зависимости от перемещения их ведущего звена. Регулирующие механизмы, во-первых, должны обеспечить плавное изменение передаточного отношения и, во вторых, надежно его фиксировать. Второе условие особо важно выполнить для импульсных вариаторов, у которых импульсивность в механизме главного движения может вызвать самопроизвольное перемещение регулирующего звена и, следовательно, разрегулировку привода на заданное передаточное отношение. Фиксирование регулирующего звена достигается за счет применения самотормозящихся передаточных механизмов и фиксирующих устройств, не нарушающих бесступенчатость регулирования или их комбинацию. В силу простоты устройства и способности фиксации у большинства вариаторов применена самотормозящаяся винтовая пара, а в тех случаях, когда самоторможение пары недостаточно, дополнительно устанавливают подтормаживающие устройства или контргайки. Особое внимание следует обратить на жесткость всей системы регулирующего механизма. Наличие нежестких звеньев неизбежно приведет к изменению амплитуды колебания ведущих звеньев МСХ импульсных вариаторов, при этом появляется кажущееся скольжение и изменение жесткости характеристики вариатора С целью удобства управления вариатором, особенно в тех случаях, когда вариатор расположен на значительном расстоянии, применяют дистанционное ручное управление механического (цепные передачи, карданные, гибкие валы и др.), гидравлического (см. гл. 2, рис. 8) и электрического (см. гл. 2, рис. 16) действия. При разработке передач с бесступенчатым автоматическим регулированием важно знать не только усилия, действующие на звенья регулирующего механизма, и по ним рассчитать элементы на прочность и особенно на жесткость, но и его кинематические свойства и прежде всего законы изменения передаточного отношения вариатора в функции координаты перемещения регулирующего звена, которой чаще всего является угол поворота а ведущего звена регулирующего механизма. Плавность регулирования и быстродействие вариатора можно характеризовать изменением передаточного отношения в единицу времени. Условимся назцвать скорость, изменения среднего передаточного отношения чувствительностью регулирования, которую можно определить по формуле di где i - передаточное отношение передачи; t - время. В дальнейшем рассматриваются регулирующие механизмы, у которых регулирование осуществляется поворотом звена, непосредственно воздействующего на изменение эксцентриситета пазового диска. Дифференциал времени где сор - угловая скорость ведущего звена регулирующего меха- низма. Подставляя значение дифференциала времени в формулу (1), получим (Op di da Объем книги не позволяет рассмотреть все многообразие регулирующих механизмов импульсных вариаторов. Поэтому ниже рассмотрены только регулирующие механизмы наиболее современных зубчато-рычажных вариаторов, которые нашли применение в приводах с автоматическим управлением. Методический подход при определении закономерности изменения передаточного отношения в процессе регулирования и оценка плавности изменения частоты вращения ведущего вала, изложенные в этой главе, могут быть перенесены и на регулирующие механизмы других систем импульсных вариаторов. У зубчато-рычажных импульсных вариаторов посредством регулирующих механизмов плавно изменяется длина кривошипа преобразующего механизма, причем движение регулирующие механизмы получают непосредственно от их ведущего звена или от механизма главного движения путем периодического подключения к последнему. У первой разновидности регулирующих механизмов передаточное отношение вариатора изменяется в зависимости от угла поворота регу;ирующего звена. Они дают возможность вести регулировку во время движения и с выключенным Установим охранное оборудование. Тел. . Звоните! |