
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 электродвигателем, вследствие чего более удобны для вариаторов с автоматическим управлением, но более сложны в конструктивном исполнении. Вторая разновидность хотя и более проста, однако и менее совершенна, она позволяет осуществлять регулировку только при включенном электродвигателе. МЕХАНИЗМЫ С АВТОНОМНЫМ УПРАВЛЕНИЕМ Механизм с двойным ioihhom. В конструкции передачи, показанной на рис. 1, регулирование осуществляется поворачиванием маховика 5. При этом поворачивается коническое зубчатое колесо 4, которое приводит во вращательное движение зубчатце колеса 5, 2 и L Последнее, имея внутри резьбу, навинчивается на резьбу неподвижного хвостовика обоймы 22 и, следовательно, получает осевое перемещение вместе с шарикоподшипником 2] и двусторонним клином 20, который запрессован левой цилиндрической частью во внутреннее кольцо шарикоподшипника. Двойной клин входит в пазы бурта ведущего вала 23у пазы каретки 15 и противовеса 17. К бурту ведущего вала винтами 24 привернута направляющая 16, по которой могут перемещаться с одной стороны каретка 15 вместе с насаженными на ее цилиндрический хвостовик шарикоподшипниками 14 и пазовым диском 13, а с другой стороны - противовес 17. Клин 20 выполнен так, что при осевом перемещении относительно ведущего вала вызывает равные, но противоположно направленные радиальные перемещения каретки 15 и противовеса 17. Этим достигается регулирование угловой скорости ведомого вала и уравновешивание движущихся масс. Осевое перемещение клина, а следовательно, и настройку на определенное передаточное число можно производить как при работанщей, так и при остановленной передаче. Для удобства балансировки в конструкции предусмотрена возможность перемещения противовеса в радиальном направлении. Для этого необходимо отвинтить контргайки 6 и 18 и повернуть установочные винты 7 и 19. Главный механизм имеет устрой-, ство такое же, как и в ранее рассмотренных конструкциях, за исключением того, что вместо втулок на пальцы коромысел 8 надеты сухари 12; кроме того, с целью уменьшения потерь на трение и износа при холостом движении, а также для лучшего центрирования ведущие зубчатые колеса 9 смонтированы на. шарикоподшипниках 10 VI 11. . Регулирующим звеном в этом механизме является маховик 5. Если за начало угла поворота а этого звена принять положение регулирующего механизма, когда г = О (что соответствует среднему положению клина), то величина г в зависимости от а определится по формуле 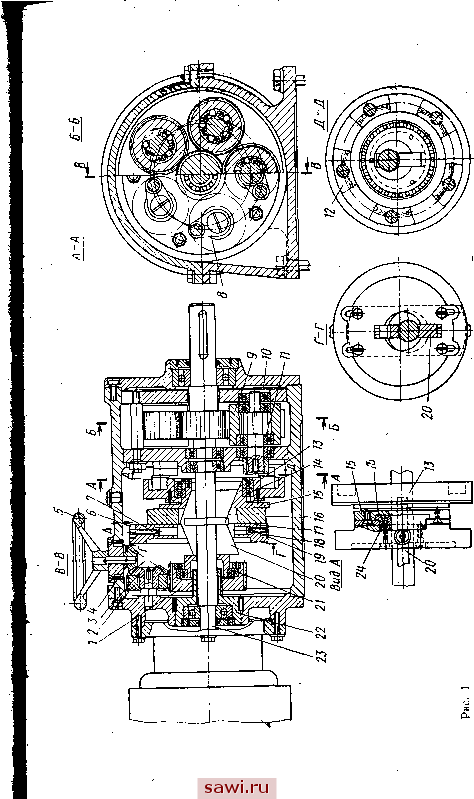 где р - угол, между наклонной плоскостью клина и осью ведущего вала; г, га, Zg, 24 - соответственно числа зубьев колес 1, 2, 3, 4\ tp - шаг резьбы хвостовика обоймы 22. Подставляя значения г из формулы (3) в формулу (11) гл. 3, получим Обозначим постоянную А - nrWs 1 tgp/pZ224 тогда Так как rftn Л1 da 2 то абсолютная величина чувствительности (5) (6) (7) Выражение (8) указывает на то, что для данного механизма (см. рис. 1) чувствительность регулирования пропорциональна угловой скорости маховика 5 и обратно пропорциональна квадрату его угла поворота. При проектирований передачи чувствительность регулирования можно значительно изменить, меняя величину А, например, изменением величин и р. Выбор последней ограничен условием: разность 90 - Р должна быть больше угла трения. Рассмотрим два случая: регулирование при Шр = const и при R = const. В первом случае, как показывает кривая R (а) на рис. 2, а, чувствительность регулирования при малых значениях а достигает весьма большой величины и, наоборот, чрезвычайно мала при больших значениях а. Если R = const, то Ир должна изменяться в зависимости от а по закону параболы, что видно из кривой Ыр (а) на рис. 2, б. Подставляя вместо а в формулу (8) его значение из формулы (6), получим nLZlZfu точувствительность регулирования прямо оТоТе Тя Гр УчГ Р РУ передаточо Характер изменения величин R я оЛр в зависимости от i показан на рис. 2, б. Из графика R (Q видно, что чувствительность регулирования резко увеличивается с увеличением передаточного отношения, особенно в области больших значений Механизм с реечным зацеплением. На рис. 3 показана конструкция передачи, имеющая следующее устройство механизма регулирования. Вращение от ручки 7 посредством зубчатых колес 6, 5 я 4 передается зубчатому колесу 8, которое, имея внутреннюю резьбу, навинчивается на резьбу неподвижной втулки 9, совершая осевое перемещение. При этом в осевом направлении будет перемещаться шарикоподшипник 10, наружное кольцо ОМ 0,0)0 0,008 0,006 0.00Ц 0002
R1lc,u1/c 0,16-- 0,12 0,Off 0,06 0,02
ол In snmiSTTionitmsnnn Рис. 2 0 5 W 15 20 25 30 35 S) которого закреплено внутри зубчатого колеса 8, и рейка , запрессованная цилиндрической частью во внутреннее кольцо этого подшипника. Рейка И, а также рейки 12 и 15 находятся в постоянном зацеплении с зубчатым колесом 14, свободна насаженным на оси 13. Ось 13 и направляющие 3 я 18 жестко связаны с ведущим валом 17. Осевой сдвиг рейки И вызывает вращение зубчатого колеса 14 и радиальные перемещения двух других реек по направляющим 3 я 18. Если рейка 12 вместе с насаженным на ее цилиндрическую часть диском 19 переместится в одну сторону, то на такую же величину переместится в другую сторону рейка 15 с прикрепленными к ней деталями 1, 2 я 16, образуюгДими в совокупности противовес. Таким образом достигается регулирование и уравновешивание механизма передачи при любых значениях г. , Условимся, что начало угла поворота ручки 7 соответствует такому положению механизма регулирования, при котором г = 0; тогда (10) 111 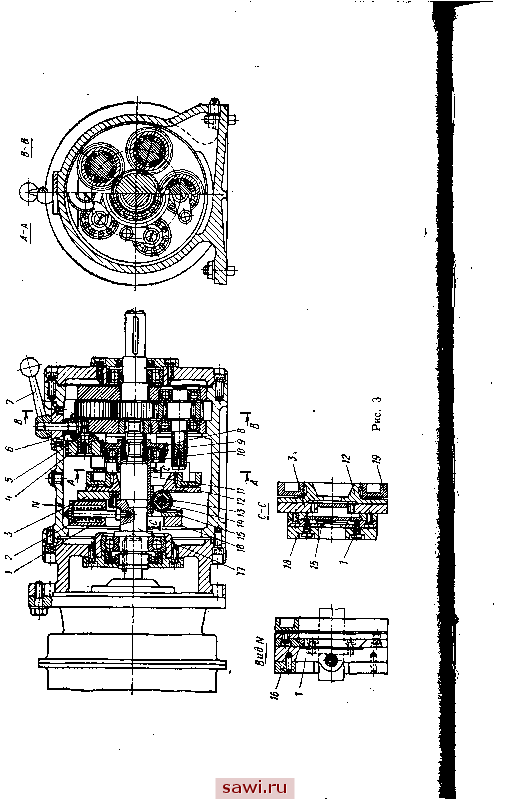 Подставляя значение г в фортйулу (11, гл. 3), получим Приняв постоянную получим ; п - ~ и, следовательно, или (.12) (13) (14) Выражения (12), (13) и (14) аналогичны соответствующим выражениям, установленным для предыдущей конструкции ва- 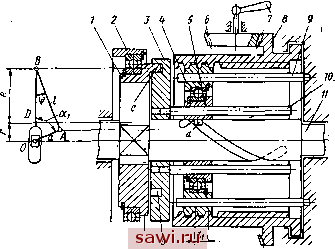 Рис. 4 риатора. Поэтому все рассуждения о чувствительности регулирования предыдущей модели в равной мере относятся и к рассмотренной конструкции вариатора. Механизм с двумя винтовыми парами. На рис. 4 показана схема регулирующего механизма с плавным регулированием передаточного отношения вариатора фирмы Fritz Philipps (ФРГ) (см. гл. 1, рис. 30), где рег /лирование осуществляется рукояткой 7 через коническке зубчатые колеса 5 и 5 и винтовую пару, Установим охранное оборудование. Тел. . Звоните! | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||