
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 у которой вращающаяся гайка с шагом резьбы ti выполнена за одно целое с большим зубчатым колесом, а винт 4 может перемещаться в осевом направлении по направляющей 9, закрепленной в корпусе. Винт соединен с втулкой 5, хвостовик а которой входит во впадину винтового паза с пологим шагом на ведущем валу И. Втулка 5 соединена пальцем 10 с диском 3, насаженным подвижно на вал и имеющим эксцентричную прорезь Ь, в которую входит хвостовик с ползуна /, несущего диск 2 механизма главного движения. При осевом перемещении втулка 5 поворачивается относительно вала и одновременно поворачивает диск 3. Ползун сопрягается с лысками на ведущем валу и при повороте диска 3 перемещается в радиальном направлении, изменяя эксцентриситет г диска 2. Слева на рис. 4 показана схема эквивалентного рычажного механизма, из которой следует (15) где а и / - длины кривошипа и шатуна; е - расстояние от шарнира В до центра D пазового диска, размещенного на ползуне. Очевидно, что максимальный эксцентриситет пазового диска Гшах = 2а. Учитывая передаточное отношение механизма, передающего движение от рукоятки 7 к диску 3 при повороте рукоятки можно записать где 2в и 28 - числа зубьев колес б и 8; и /г - соответственно шаг винтовой пары 4, 8 я винтового паза на валу ; <7 = Zj-i In = На основании формулы (11) гл. 3 будем иметь rh а cos qa + / )/l sm да -j- е (16) Определив найдем чувствительность регулирования, используя выражение (2): aq sin qa + - IqX sin 2qa (l - X sinijoc) acosqa-{-l(l-Xsinqa) +~e. (17) Ha рис. 5 показаны графики изменения передаточного отношения и чувствительности регулирования в зависимости от угла поворота ведущего звена регулирующего механизма. На большей части диапазона регулирования передаточное отношение (рис. 5, а) изменяется по закону, весьма близкому к линейному. Чувствительность регулирования (рис. 5, б) с увеличением передаточного отношения вначале возрастает от нуля и, перейдя через максимум, убывает до нуля.  20 0 60 80 ж(рад) о а)
20 ио 60 80 л(рад) 6) Рис. 5 Планетарный механизм (рис. 6). Основные звенья получают движение от ведущего вала 10, однако регулирование производится автономно и может осуществляться как на ходу, так и при выключенном двигателе. Конструкция механизма показана в гл. 1 на рис. 33. Ведущий вал (рис. 6) приводит в движение закрепленные на нем диск 4 и центральное зубчатое колесо . Так как начальные диаметры центральных колес внутреннего зацепления 5 и 7 равны, а также равны начальные диаметры сател- t-iK литов б и 8 и зубчатых колес и 12, то последнее и соединенное с ним коническое колесо вращаются синхронно с диском 4, в пазу которого смонтирован ползун 3 с цапфой кривошипа механизма главного движения. Регулирование длины кривошипа г осуществляется поворотом маховика 14, при этом посредством зубчатого колеса 15 происходит поворот двухвенцо-вого центрального зубчатого колеса 5, что вызывает движение относительно ведущего вала зубчатых колес 12 и 13, поворот конического колеса / вместе с винтом 2, а следовательно, радиальное перемещение ползуна 3 в пазу диска 4. С целью повышения плавности регулирования наружный венец колеса 5 выполняют в виде червячного колеса и движение колесу 5 от регулировочног9 маховичка передается через червячную передачу (см. гл. 1, рис. 33, б). Данный регулирующий 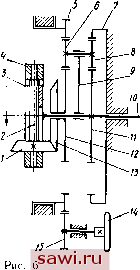 механизм Может быть использован и для других конструктивных решений изменения длины кривошипа. Угол поворота а регулирующего звена с длиной кривошипа г, согласно кинематической схеме, имеет взаимосвязь: г = Го + а (18) где Го - начальная длина кривошипа; / - шаг резьбы винта 2; 2 - числа зубьев колес наружного зацепления (индексы соответствуют позициям на схеме); 25 - число зубьев венца внутреннего зацепления колеса 5. Используя последнее выражение и формулу (51) гл. 3, получим / o-f ра (19) Определив din рГ21г da (r -fpoc)2 найдем чувствительность регулирования по абсолютной величине (20) МЕХАНИЗМЫ С ПРИВОДОМ ОТ ВЕДУЩЕГО ВАЛА ВАРИАТОРА Импульсный регулирующий механизм. На рис. 7, а показана одна из наиболее старых конструкций вариатора, регулирующий механизм которого имеет следующее устройство. Внутри барабана 20, жестко соединенного с ведущим валом /, смонтированы одно в другом эксцентричные кольца 8 и 9. Кольцо 8 может вращаться относительно барабана 20 и кольца 9, которые благодаря штифту 19 лишены возможности относительного поворота. Штифт 19 перемещается в пазу кольцевой гайки барабана 20. Кольцо 9, внутри которого вращается диск 10, при относительном вращении кольца 8 перемещается, изменяя при этом эксцентриситет диска 10. Поворачивание кольца 8 достигается поворотом (на небольшой угол) ручки 14, насаженной на оСь 77; при этом поворачивается зубчатое колесо 16, которое вызывает сдвиг рейки 18 и соединенного с ней клина 13. Последний, перемещаясь в пазу неподвижной втулки 15, изменяет эксцентриситет диска 12, перемещающегося между направляющими, укрепленными на втулке 15. Эксцентриковый шатун , охватывающий хомутом диск 12, шарнирно соединен с рычагом 7. При вращении вала 1 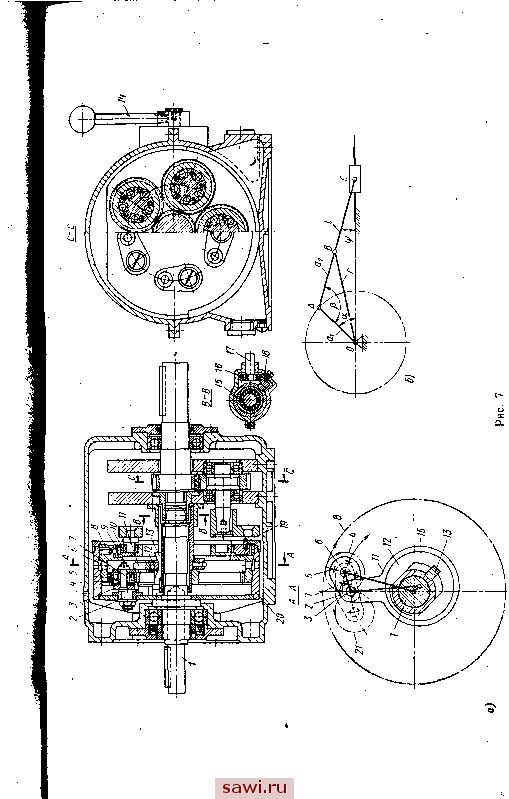 шатун вследствие эксцентричного расположения диска 12 приводит в колебательное движение рычаг 7 вокруг цапфы 6 и через МСХ 5 вызывает вращение зубчатого колеса 4, которое, в свою очередь, находясь в зацеплении с зубчатым колесом внутреннего зацепления кольца 8, приводит последнее в относительное вращение. Если ручка 14 находится в среднем положении, то эксцентриситет диска 12 равен нулю и регулирующий механизм-не работает. Для того чтобы иметь возможность уменьшать и увеличивать условную скорость ведомого вала, кольцо 8 должно иметь возможность вращаться в ту или иную сторону относительно барабана 20. Если кольцо 8 при повороте ручки 14 вращалось в одну сторону, то вращением ручки в другую сторону достигается изменение направления в относительном вращении кольца 8 вследствие поворота коромысла 3 вокруг цапфы 2. При этом с зубчатым колесом кольца 8 будет зацепляться не колесо 4, а промежуточное колесо 21. В этой конструкции передаточное число изменяется в зависимости от величины угла поворота а кольца 8 относительно барабана 20. Кинематическая схема механизма, образованного звеньями 20, 8, 9 и 10 и предназначенного для изменения величины эксцентриситета диска 8, показана на рис. 7, б в виде кривошипно-шатун-ного механизма ОАС, в котором OA = - длина кривошипа (величина эксцентриситета кольца 8 относительно ведущего вала); АС = I - длина шатуна (расстояние от смещенного центра кольца 5 до оси штифта 19); АВ = 2 - расстояние от смещенного центра кольца 8 до центра диска 10 относительно ведущего вала. Для того чтобы величина г могла изменяться в пределах от О ДО тах> необходимо 1 = 02 = а, (21) тогда максимальная величина эксцентриситета диска 10 max = 1 + а2 = 2а. Из треугольника OA В следует, что - 2dia2 cos р г= \,4\aV 1 - cos р. Величина угла р определится из формулы Р = 180 - (а + ф). Из треугольника ОАС а sin if / ~~ sin а (22) (23) откуда г; = arcsin {К sin а), где (25) Подставляя значения р и ф в уравнение (22), получаем г= l,AlaV 1 -f cos[a + arcsin(>.sina)]. (26) ПодставивЗначения г в формулу (11) гл. 3, определим передаточное отношение передачи r2h \,4\aV\ + cos [a + arcsin (X sin a)] din da Следовательно, = i( ). (27) (28) Для определения угловой скорости сОр относительного вращения кольца 8 воспользуемся методом обращения движения. Сообщим одновременно всем звеньям механизма, приводящего в относительное вращение кольцо 8 (см. рис. 7), вращение вокруг вала 1 с угловой скоростью а>, равной по величине и противоположной по направлению угловой скорости вращения ведущего вала. Тогда этот, механизм будет аналогичен механизму главного движения передачи. Поэтому угловая скорость кольца в его относительном вращении (29) где гр - среднее передаточное отношение в обращенном движении между диском 12 и кольцом 8 (см. рис. 7, а). Это передаточное отношение . 2n2g (30) где Zg - число зубьев колеса внутреннего зацепления кольца 8; 24-число зубьев колеса 4; % - угол размаха рычага 7. Угол фр изменяется с изменением эксцентриситета е диска 12: (31) Пользуясь формулами (29), (30) и (31), формуле для определения чувствительности регулирования можно придать вид 2яг, -f(e) F, (а). (32) 119 Установим охранное оборудование. Тел. . Звоните! |