
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 примем постоянную величину откуда R=Af (е) Fy, (а). (33) (34) Чувствительность регулирования является, таким образом, функцией двух переменных е и а. На рис. 8 в виде графика показано изменение этой функции в зависимости от а для HJecкoлькиx фиксированных значений е 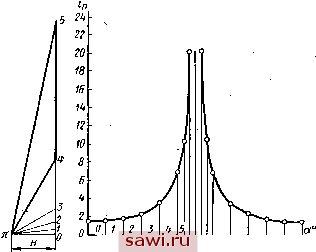 R.1/C 0.75 г 30 60 90 т 150 180 21021*0270300330360 Рис. 8 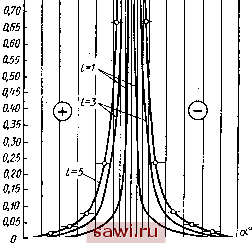 .30 60 90 120 150 т 210 2W270 300 330360 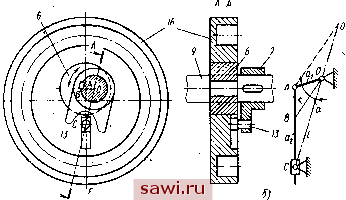 ?(2б1 2 12В ) U}, 1 У /Л Рис. 9 Г Г ГТ 23 22 20 19 у л ДЛЯ механизма с = 15 мм и / = 120 мм. Непосредственно дифференцирование функции (а) было бы слишком громоздким поэтому выполнено графическое .дифференцирование графика in (а), изображающего зависимость, роответствующую уравнению (27). По графикам (см. рис. 8) можно заключить, что чувствительность регулирования увеличивается с увеличением передаточного отношения и уменьшается с уменьшением е. Одну и ту же величину R можно получить в любой точке области регулирования, подбирая соответственно величине значение е; при этом с увеличением должна уменьшаться величина е. Рассмотренный механизм, являясь наиболее совершенным в смысле плавности регулирования, не нашел большого применения ввиду сложности конструкции и отсутствия уравновешивающего устройства. Механизм с планетарной зубчатой передачей. Изменение величины эксцентриситета г диска 16 в этом механизме (рис. 9, а) зависит от угла поворота а эксцентрика 6 относительно ведущего вала 9 (позиции на рис. 9, а боответствуют позициям на рис. 29, гл. 2). Диск 16 благодаря пальцу 13, который призматическим концом входит в паз диска, а цилиндрическим свободно вращается в отверстии кольца 7, лишен возможности поворота относительно вала 9. Кинематическая схема этого механизма показана на рис. 9, б. Условимся, что ui - Длина кривошипа (эксцентриситет эксцентрика 6 относительно вала 9); - расстояние от центра эксцентрика 6 до центра диска 16; I - длина стойки, т. е. расстояние от оси вала 9 до оси поворота пальца 13; г - эксцентриситет диска 16. Для того чтобы величина л могла изменяться от О до лах очевидно, необходимо соблюдение условия = а = а, (35) следовательно, = 2а. (36) Продлим стойку ОС (рис. 9, б) до пересечения в точке D с линией, проведенной параллельно ОВ. Из чертежа следует ЛС==а?--/ -2ai/cosa; = а? + OD + 2aiOD cos а; AC - ui (37) (38) (39) (40) Подставляя соответствующие значения по формулам (38), (39) и (40) в формулу (37) и принимая во внимание условие (35), после преобразования получим V= 1,41а у J . / cos а - а Va + /а 2а1 cos а В зависимости от сх передаточное число 1,41а 1 1 - ! cos а - а (41) (42) Ya + /2 - 2al cos а (43) Следовательно, Поворот эксцентрика 6 относительно ведущего вала со скоростью СОр осуществляется с помощью зубчатого механизма (см. гл. 1, рис. 29), кинематическая схема которого показана на рис. 9, в (позиции на рис. 9, в соответствуют позициям на рис. 29 гл. 1). Угловую скорость СОр относительно движения эксцентрика б определим приемом обращения движения. Для этого сообщим всей системе зубчатого мехрлизма угловую скорость со, равную и обратную угловой скорости ведущего вала 9. В обращенном движении данный механизм будет представлять системы двух последовательно соединенных зубчатых планетарных механизмов. В зависимости от положения ручки 8 (см. гл. 1, рис. 29) могут входить в зацепление либо зубчатое колесо 2, либо зубчатое 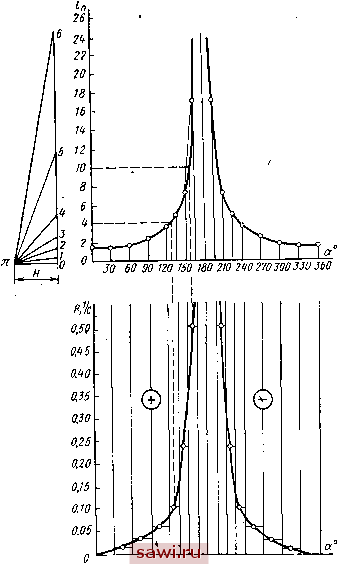 Рис. 10 J0 60 90 пот тот 2чо гтозоо зюш колесо 26. Обозначим зубчатые венцы колес соответственно через 2 и 2 и 26 и 26 (рис. 9, в). Означим также число зубьев каждого колёса знаком z с индексом, соответствующим номеру колеса. Тогда в ,.случае зацепления колеса 2 (OiZaZgaZia Р (2222 - ггаз) (Zig - Zao) Соответственно при зацеплении колеса 26 (OiZaeZaaZio (ZasZae -г2згаб)(г]9-Zao) (44) (45)  Рис. И Зная (Ор, можно определить чувствительность регулирования R = (OpFa (а). , (46) Так как сОр по выражениям (44) и (45) есть величина постоянная, то чувствительность регулирования для этого механизма зависит только от угла а. - - - На рис. 10 показан график изменения R в зависимости 7 от сх для механизма с лах = ку/мя] = 13 мм и / = 25 мм. Вследствие сложности непосредственного дифференцирова-ния.функции in (а) ее производ-пая Fa (а) -определена методом графического дифференцирова-ния. По графику этой производной можно судить о чувствитель-~ ности регулирования на всем возможном диапазоне. Плавное увеличение чувствительности регулирования с увеличением а наблюдается при передаточных отнощениях i < 4. При ij, > 4 величина R резко возрастает, а при in > 10 эта величина принимает весьма больщие значения. Чувствительность регулирования рассйотренного механизма можно изменить путем изменения передаточного отнощения зубчатого механизма. Механизм с торцовой резьбовой парой. Наиболее простую конструкцию имеет регулирующий механизм зубчато-рычажного импульсного вариатора фирмы Gebruder Weiss (ФРГ), показанного на рис. 31 (гл. I). В этой системе (рис. И) относительно простой механизм отбора движения от ведущего вала и механизм изменения длины кривошипа г. Регулирование осуществляется перемещением в осевом, направлении полумуфты 4, соединенной фрикционно с хвостовиком диска 2. При этом с диском 2 соединяется одно из зубчатых колес 3 или 5, которые приводятся в движение от зубчатого колеса 6, .закрепленного на ведущем валу 7, и блока зубчатого колеса 8, 9 м 10. Так как передаточные отнощения зубчатых пар 3-10 и 5-9 отличаются от передаточного отношениз пары 6-8 на весьма небольшую величину (одно в сторону увеличения, а другое в сторону уменьшения), то зубчатые колеса 3 и 5 вращаются в разные стороны с малой угловой скоростью относительно ведущего вала. В зависимости от того, какое из колес 3 и 5 .посредством полумуфты 4 соединяется с диском 2, последний вращается относительно вала 7 в ту или другую сторону. Диск 2 посредством торцовой резьбы соединяется с эксцентриком 1 и при вращении вокруг вала 7 сообщает эксцентрику радиальное перемещение подобно движению кулачков в самоцентрирующемся зажимном патроне, прц этом изменяется эксцентриситет л пазового диска, насаженного на хвостовик эксцентрика. Если эксцентрику движение передается через колесо 3, то скорость радиального перемещения эксцентрика, а следовательно, изменения г будет ?8Z3 (47) числа зубьев зуб- где t - шаг торцовой резьбы; Zg, Ze, Zg и Zio натых колес шестерен 3, 6, 8 м 10. Найдем чувствительность регулирования, используя формулу (И) гл. .3: --t--- ~r~dr ИЛИ по абсолютной величине (48) Если регулирование осуществляется при включенном зубчатом колесе 5, то чувствительность регулирования определится по формуле (48), в которой отношение следует заменить ог- ношением Как следует из формулы (48), при постоянной скорости изменения эксцентриситета г пазового диска чувствительность регулирования резко снижается с увеличением г. Установим охранное оборудование. Тел. . Звоните! |