
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 хода, как будет показано ниже, обусловливаются конструкцией механизма, законами движения обойм и целым рядом параметров механизма. Очень важным является нормальное протекание динамических процессов, обеспечивающих нормальное функционирование механизма как в период свободного хода, так и в последующие периоды. Действие динамических нагрузок на элементы МСХ вызывает колебательные процессы в период свободного движения и может привести к. нарушению контакта ролика с рабочими поверхностями обойм. Указанное действие проявляется наиболее интен- 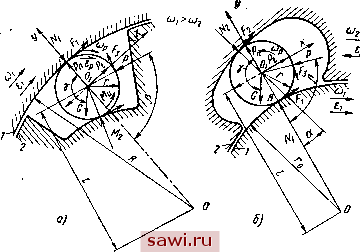 Рис. 1 сивно в вариатора), приводящихся непосредственно быстроходными электродвигателями, полный цикл которых осуществляется в течение сотых долей секунды. Колебание роликов не только повышает потери в период свободного хода и интенсифицирует износ, но и нарушает нормальное протекание процесса заклинивания. Если нарушение контакта ролика с обоймами не всегда пагубно, сказывается в период свободного хода, особенно при отсутствии колебаний, то в момент начала заклинивания оно недопустимо. Условие контакта ролика с обоймами в*конечной фазе периода свободного хода следует считать одним из главных условий правильного взаимодействия основных звеньев МСХ. Невыполнение указанного условия ведет к запаздыванию начала процесса заклинивания или даже к полному отсутствию его. При этом возможно возникновение больЩих динамических нагрузок вследствие несвоевременного заклинивания а, следовательно, интенсивный износ элементов механизма и нарушение всей работы машины в целом. Период свободного хода у МСХ импульсных вариаторов увеличивается с увеличением амплитуды колебания ведомого звена преобразующего механизма. Во избежание интенсивного износа в этот период необходимо выбирать параметры МСХ так, чтобы ролики вращались в период свободного хода, в противном случае увеличатся потери и появится местный износ роликов в виде лысок. Свободное движение МСХ с цилиндрическими роликами. Схемы механизмов с действующими на ролик силами для наиболее общего случая движения, когда обойма и звездочка вращаются с переменными угловыми скоростями и Oj, а ролики вращаются вокруг своей оси сугловой скоростью Юр, показаны на рис. 1, а (механизмы с внутренней звездочкой) и на рис. L, б (механизм с наружной звездочкой). Введем следующие обозначения: Р, Рз> /з и рз - усилие прижимной пружины, сила трения, коэффициент трения и угол трения на поверхности контакта ролика и прижима; N, F, f, pi и - нормальная реакция, сила трения, коэффициент трения, угол трения и коэффициент трения качения на поверхности контакта ролика с обоймой; р2< f 2 И р2 - нормальная реакция, сила трения, коэффициент трения и угбл трения на поверхности контакта ролика и звездочки; G и m - вес и масса ролика; g - ускорение силы тяжести; / - расстояние между центрами ролика и обойм; Р - угол между направлением усилия Р и линией 00, соединяющей центры механизма и ролика, угол установки прижима; у - угол между линией действия силы тяжести и линией OOi, Si, ва, бр - угловые ускорения обоймы, звездочки и ролика; Р а Р - нормальная и тангенциальная силы инерции; ,Ур - момент инерции ролика относительно его оси. Запишем уравнения динамического равновесия ролика, проектируя все силы на координатные оси X и F (см. рис. 1): 2 г/ = +Л?1 -i- Р + Р cos р ± fgP sin р ± Л?2 cos а т Т /гЛ2 sin а - G cos(180° - у) = 0; 2 д; = fiNi + - Р sin р ±/зР cos р + Nina + +f гЛг cos а - G sin (180° - y) = 0. Данные уравнения справедливы как для механизмов с внутренней звездочкой (см. рис. 1, а), так и для механизмов с наружной звездочкой (см. рис. 1, б), с тем лишь отличием, что у некоторых членов знаки будут различны. Необходимо заметить, что в этих уравнениях и в последующих выражениях при исследовании механизмов с единичным расположением роликов верхние знаки соответствуют механизмам с внутренней звездочкой, нижние - механизмам с наружной звездочкой. В результате совместного решения уравнении равновесия находим нормальные реакции Ni и N2- -Р [(1 + /2/3 sin (Р ± а) ± (2 - /з) cos (Р ± а)] ± ± Р (sin а + /2cos а) - Pt (cos.а - /2 sin а) + а; +G[sin (у ± к) ± 2C0S(y ± )] . 1 (I-/1/2) sina + (/i + /2)cosa Р W - Ш sin р + (/1 + /з) cos р] + hPn ~Pt + N, = + G (sin Y + 1 cos 7) (1~Ш sin a + (1 +/2) cos a /2V2 8p/p /3 Это справедливо при условии вращения ролика rhN,~ Условия контакта ролика с обоймами запишутся в виде неравенств yVi>0 и Л?2>0 или, принимая во внимание, что силы инерции (4) (5) (6) (7) Рп = т1(4, Р( - тЫ, на основании уравнений (1) и (2) получим т/[(cos а -/2 sin а) 82 + (sin а-f/2 cos а) а)]- р -G[sin (7± а) ±/2Cos(7± )] . (l-f/2/3)sin(P±a)±(/2-/3)cos(P±a) ml (82 ±Люр - G (sin 7 - ft cos 7) , (l-fiWsinp + (fi-f Wcosp где - усилие прижимной пружины, гарантирующее контакт ролика с обоймой; Р - усилие пружины, гарантирующее контакт ролика со звездочкой. Как видно из уравнений (6) и (7), по мере изменения угловой скорости 2 и углового ускорения Cg, а также угла 7 величины Р и р2 в период свободного хода будут изменяться. Следует заметить, что угол Y. определяющий направление силы тяжести относительно радиуса механизма 00, одновременно является и углом поворота звездочки. Естественно, для того чтобы иметь контакт ролика с обоймами в течение всего периода свободного хода, следует обеспечить в механизме свободного хода прижимное усилие Р, которое было бы больше или равно наибольшей из максимальных величин Pi и Pj. Условие вращения ролика без учета трения качения по рабочей поверхности обоймы на основании выражения (3) имеет вид Р< После подстановки в это неравенство значений нормальных давлений Ai и из уравнений (1) и (2) и замены сил инерции Р и Р их значениями, определенными по формулам (4) и (5) условие вращения ролика примет вид > в й)2<(1)2 = Л, /л2р + 382 ± AiJpEp ± С 1/2 (sin Y fi cos y) - -fi[sin(Y±a) itfacos (Y±a)]}, где ©1 - предельная угловая скорость звездочки, при которой ролик начинает вращаться вокруг своей оси: Ах=[т1 (fi sin а + 2fif2 cos -) Л, = Л = ±/2 1(1 - fifs) sin Р + (/1 + h) cos Р ] ± fs t(l - f if 2) sin a + (f 1 + /2) cos a ] + +f X t(l + f 2/3) sin (p ± cc) ± (/2 - fs) cos (p ± a) ]; m/ [±:fi (cosa -/2 sina) T/2]; Л4 = 4-- 1) + + Неравенство (9) обусловливает такое значение угловой скорости ©2 звездочки, при котором обеспечивается, вращение ролика во время свободного хода. Для механизмов с внутренней звездочкой вращению ролика соответствует диапазон угловых скоростей ©2 от предельной угловой скорости © и выше, а для механизмов с наружной звездочкой вращение ролика наблюдается при угловых скоростях ©2, меньших предельной угловой скорости ©. , В тех случаях, когда угловая скорость ©2 периодически изменяется, переходя через нуль, ролик может вращаться с остановками. В качестве примера на рис. 2 приведены графики изменения угловой скорости ©2 и ©I для МСХ зубчато-рычажного импульсного вариатора (см. гл. 1, рис. 29) за полный цикл его движения в функции угла поворота кривошипа. В период увеличения угло- вой скорости ©2 за время поворота на угол ф1 угловая скорость ©2 < ©, и, следовательно, ролик не вращается относительно звёздочки. При повороте кривошипа на угол фз ролик будет вращаться, так как ©2 > ©. В период, соответствующий углу поворота фз, угловая скорость принимает мнимые значения; это. указывает на то, что условие вращения ролика выполняется даже при отрицательном значении центробежной силы инерции Р , всегда имеющей положительное значение. Итак, мнимому значению ©I будет соответствовать фаза вращения ролика. Рассматривая последующие периоды умякла, видим, что после периода за- клнненного состояния, осуществляющегося за угол поворота ф, насту41ает период выстоя ролика при повороте кривошипа на угол Ф5 в силу того, что по абсолютной величине cOg < сй . Момент сил трения в .период свободного хода не только обусловливает потери в МСХ, но и нри значительной своей величине вызывает обратное движение ведомой части привода при нензгру-женном вариаторе. Если при движении механизма неравенство (3) выполняется, то исходя из предположения, что качение ролика по поверхности обоймы осуществляется без скольжения, роликовый МСХ в период свободного движения можно уподобить фрикционному дифференциалу; тогда угловая скорость ролика р = 2 -f -©г). (10) Момент сил трения Ml одного ролика будет слагаться из моментов сил трения на поверхностях соприкосновения ролика со звездочкой и прижимом и момента трения качения ролика на рабочей поверхности обоймы, т. е. Mi = r{f2N2 + hP)kiNi. Принимая во внимание уравнение (10), определим приведенный к обойме механизма момент сил трения одного ролика: 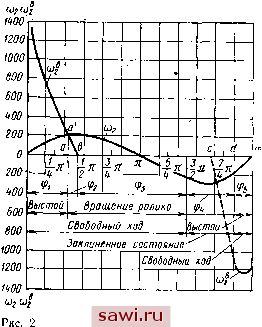 (11) где k Подставляя значения и Л из уравнения (1) и (2) в уравнение (11), получим n-={j+-=t/)(FiP-f ti2P -F3+h4g). -166 Здесь величины p-i, р-г и будем называть приведенными коэффициентами трения механизма свободного хода; они равны: >1 - Ш sin (к ± Р) ± (/2 - /з) cos (к ± Р) (I-fih) sia а+(fi + fi) cos а (12) (13) (14) (1 - fih) sma+Qi + / ) cos а fs [( - Ш sin g + (fr+ fi) cos a]. (1-Ш sina4-(fi-i-Wcosa ±k (sma + li cos a) + fj . ~ (1 - hh) Sin a+{h + h) cos a A(coscc -2 sin g)+/г ~ sin a + (/i-i-Wcosg k I sin {y±a)+ h cos (-y ± )] -I- 2 (sin -y + /i cos -y) ~ (1 - hh) sin a+(h + h) cos g Суммарный момент сил трения всех роликов = + /--/) Z ((iP +>2 - \1гР* + t 14g) . где Z - число роликов. Так как ролики в механизме расположены строго на одинако- вых расстояниях один относительно другого, то можно принять Sfgo. Тогда момент сил трения в период свободного хода в общем случае движения Лт Z[-фг +г ±l) [iiiP -f ml{ii2(4- f382)], (15) a мгновенная мощность Л, затрачиваемая, на трение, Лт = 2 (т + + - 1362)] ((01 - г). (16) Последние соотношения указывают на то, что потери в МСХ импульсных вариаторов характеризуются тремя приведенными коэффициентами трения p.i, Цг и Цз. На основании формул (12), (13) и (14) можно сделать вывод, что приведенные коэффициенты трения МСХ можно уменьшить в основном за счет уменьшения коэффициентов трения На поверхностях контакта ролика с обоймами и прижимом, ибо угол р, как будет показано ниже, следует назначать из условия минимального усилия Р прижимно! пружины, а угол а - из условия заклинивания. Установим охранное оборудование. Тел. . Звоните! |