
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 Как явствует из формул (15) и (16), потери в период свободного хода можно уменьшить также за счет уменьшения радиальных размеров механизма и числа роликов, за счет установки прижимов с минимальными прижимными усилиями и выбора обоймы в качестве быстроходного звена механизма. Если неравенство (9), при выполнении которого обеспечивается вращение ролика, не соблюдается, что может иметь место в диапазоне малых угловых скоростей для механизмов с внутренней звездочкой и в диапазоне больших скоростей са для механизмов с наружной звездочкой, то ролики в период свободного хода остаются неподвижными относительно звездочки. При определении реакций нормальных давлений NiU N для этого случая действием силы трения Fi в силу ее малости можно пренебречь, и тогда уравнения равновесия сил, действующих на ролик (см. рис. 1), имеют вид + ЛГх + Р + Р cos р It iVa cos а + G cos Y = 0; P - P sin p + 2 sin a - G sin v = 0, И, следовательно, Ni = P (sin p ctg a ± cos P) + G (sin Y ctga ± cos y); P sin P - Pt + G sin Y P - P, ctg a + (17) ДГ PsinP-P/--GsinY Условия контакта при невращающемся ролике примут вид Р( ctg + Рп - G (sin Y ctg а ± cos у). sin р ctg а ± cos р > Pi - G sin у Р, :> sin р (20) Для рассматриваемого случая момент сил трения = fiN, (/ - г) z или, с учетом формулы (17), Mr = fi{l±r) 2 [Р sin р ctg а zt cos р =t т/ (о)? - ег ctg а)] + Gctga2sin[Y + (n-l)]+G5] , 2я , Y + -(п- 1) (21) Пренебрегая влиянием сил тяжести роликов вследствие равномерного расположения их в механизме, имеем = fiz {I ±г)[Р (sin р ctg а ± cos р) ±: ml {оъ - ctg а)]. > (22) Мощность, затрачиваемая на трение, Лг = fa {I ± г)[Р (sin Р ctg а It cos ) ±ml {он ~ ctg а) (wi - (о). (23) Анализируя формулы (15) и (22), можно установить, 4fo если для механизмов с внутренней звездочкой по мере увеличения угловой скорости звездочки со 2 увеличиваются моменты трения, то для механизмов с наружной звездочкой, наоборот, момент трения уменьшается с увеличением ©2, что является одним из преимуществ последних механизмов. У механизмов с наружной звездочкой, очевидно, момент трения будет равен нулю, когда контакт ролика с внутренней обоймой нарушится. Это возможно при ЛГ < 0. Из этого условия, используя формулу ис. 3 (17), определяем предельную .угловую скорость звездочки, при которой ролики начинают отрываться от внутренней обоймы: 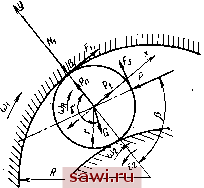 Р (sin Р ctg сс - cos Р) - Р/ ctg + G (Sin у ctg к - cos у) Максимальное значение ©3 в течение одного оборота звездочки равно: / Р sin (Р - №) + Pt cos № -i- G ©2 max ml sin a что соответствует y = 90° + a. В механизмах с внутренней звездочкой (см. рис. 1, а) с увеличением узловой скорости звездочки ©2, а следовательно, с увеличением центробежной силы инерции Р увеличивается нормальное усилие и уменьшается нормальное усилие Л/а. т. е. ролик, преодолевая усилие прижима, стремится прижаться к ра- бочей поверхности наружной обоймы и оторваться от звездочки; при этом ролик вращается относительно своей осн.. Если нормальное усилие Лг. определенное по выражению (2) для слуЧая, когда ролик вращается, примет значение N4 < О, то ролик будет контактировать только с наружной обоймой и прижимом, как показано на рис. 3. Используя уравнение, (2), , определим предельную угловую скорость звездочки © , при которой ролик начинает отрываться от внутренней обоймы: ©2 Y ~ Р - - COS р1 -f G (sin Y - fi cos Y) - Pt (24) Из этого выражения видно, что в течение одного оборота звездочки с изменением угла у изменяется и угловая скорость о -Очевидно, отрыв ролика при всех его положениях за время одного оборота будет наблюдаться при максимальной угловое скорости fi)?max. считая ее как функцию угла у. Из последнего уравнения определим обычными методами угол, соответствующий © max: / Y= 270°-I-pi. Подставляя значение у в уравнение (24), имеем >2тах = ]/Р [(1 -Ш sin р - (/i + /з)со5р] -f G (COSpi + /, Sin pi) V hml (25) Таким образом, если ©j > © max. то ролик будет находиться в соприкосновении только с рабочими поверхностями наружной обоймы и прижима. В этом случае уравнения динамического равновесия сил, приложенных к ролику, в виде суммы проекций на координатные оси (см. рис. 3) будут иметь вид -Ni -I- Р 4- Р сое р -I- /зР sin р - G;cos (180 - y) = 0; f - Р sin р + faP cosp + P;~ G sin (180 - 7) = 0, откуда Pn (sin p -cos p) + (cos p +/з sin p)- - G [ sin (Y - p) -I- /3 cos (v.- p)] (1-Ш sinP-(/i + /3)cosp p hPn + Pt + G (/1 cos Y- sin Y) (1-Ш sin p-(f,.4-/3) cos p- (26) (27) Зная величину P, определенную по этой, формуле, можно определить деформацию прижимной пружины, а следовательно, и положение ролика в пространстве между обоймами в период свободного хода. Угол Р, при котором Р принимает минимальное значение, определяется так: I = (l-fj3)cosp4-(fi4-f3)sinp = 0 Р = 90° 4- Pi 4- Рз- Условие вращения ролика примет вид или, подставляя значения Fj и Pg, получим Р < rfi (mto + G cos Y)-epyp [fs-fiCcosp-f fjsinp)] (28) Ha основании формулы (10) угловое ycKopeime ролика г= -7- (1 - г) -г Б2- . Из условия вращения ролика следует, что минимальное значение Р будет иметь место при y = 180°: min r[/j-/i(cosp-b/3Sinp)l- Предельная, угловая скорость звездочки ©?, г!ри которой ролик будет вращаться, определяется, если в выражение (28) подставить величину Р из условия (27); ©2 у -Рг \и (h COS Y -1Гп10 + h [sin (V - P) + h cos (Y P)l 1 .j. firml (sin P-2/3COS2 -- Ptr Us - fi (cos p -f /3 sin p)l 4- ep/p [(1 - Ш sin p - (/1 + /3) cos P] 29) /irm/(sinP-2/3Cos2--) Найдем угол y. соответствующий максимальному значению угловой скорости ©2тах- == h [cos (Y - Р) - h Sin (y - P)] - /3 (fi sin Y + cos y) = 0, откуда y = jc 4- arctg (30) f,-A(cosp + /.sin p) fiSinp-2f3Cos2p/2 J Момент сил трения, приведенный к наружной обойме, для одного ролика, когда ©2 > тах, равен Подставляя в последнее уравнение значение Ni изуравнения (26) и Р из уравнения (27), имеем- Мп ==(R+ -Ц) (нгРп + liiPt 4- \ 12 - W , if3 + fe(Sin p-facosp) . 1- sin p-f3Cosp-fi(cosp+f3 sin р) (31) [is = /,4-fe (cosp + /., sin p) sin p - /3 COS p - 1 (COS p + /3 sin p) , (f, COS Y - Sin V) - fel sin v - P) 4 3 COS (Y - P)] Sin p - COS p - fi (COS p 4- sin p) Суммируя моменты трения Mj, для z роликов, определим момент трения механизма: (32) Принимая сумму (.ц = О, вследствие равномерного расположения центров роликов на окружности радиуса / будем иметь Mr-ztnl(R + -~Yii,4 + + 1362). (33) Следовательно, в случае, когда ролик не имеет контакта с внутренней обоймой, потери в период свободного хода характеризуются двумя приведенными коэффициентами трения и Свободный ход механизмов с эксцентриковыми роликами. Механизмы с эксцентриковыми роликами и с кольцевой прижимной пружиной или-с подвижными сепараторами. В период свободного хода ролики, связанные между собой прижимной кольцевой пружиной или сепаратором под действием сил трения на поверхностях контакта роликов с обоймами и сил инерции, могут перемещаться все в совокупности относительно обойм. Относительная угловая скорость между роликами и обоймами может иметь как положительное, так и отрицательное значение, следовательно, и силы трения Рн F2 (рис. 4) могут иметь различное направление. Под действием центробежной силы инерции Рп, очевидно, увеличивается сила трения f и уменьшается сила трения F, что по мере увеличения угловой скорости роликов со уменьшает относительную скорость -©, которая при установившемся движении равна нулю, т. е. (Oj = ©. Принимаем во внимание, что свободный ход возможен, когда угловая скорость роликов © может принимать при вращении обойм с переменными угловыми скоростями (наиболее общий случай) следующие значения: ©!>.©> ©2; 172 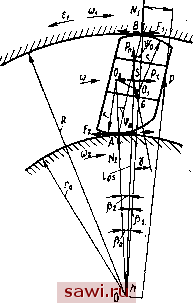 Рис. 4 © > © < ©2; ©1 < © > ©3. Рассмотрим каждый из этих случаев Ьтдельно. На рис. 4 показаны схема механизма и усилия, действующие на ролик в период свободного ;сода. Запишем уравнения динамического равновесия ролика при ©1 > © > ©2, проектируя все силы на направление ОВ и перпендикулярное к нему: -Ni + N2 cos Po-h2 sin Po + .P cos + P cos f>i + -f/ sin Pi - G COSY = 0; Fi - N2 sin Po - fii cos Po -f P sin [x - P sin Pi + -b Pt cos Pi + G sin Y = 0. Составим уравнение моментов относительно точки О: F,R - [2М2Го + Pilos + Ghs sin (y - Px) - Р/г = О. (34) Здесь Р - прижимное усилие; /2 - коэффициент трения на, поверхности соприкосновения ролика с внутренней обоймой. Остальные обозначения см. на рис. 4. Решая эту систему уравнений, найдем нормальные реакции: дг IR (bin + cos Ра) - h (cos - sin gp) - /Гр cos \i] P R( Sin-Po + /2 cos Po) - /зГо . , [j?(sin Pa-bfacospa) -farpCOSpilPn , T ?(Sin Po + /2COSPo)-/2ro T [R (cos P2 - /2 sin Рг) - Igs (COS Po - 2 sin Po) - frg sin PJ Pt /?(sin P -i-f2COspo)-f2-o [R (sin Y2 - fi cos Y2) - as (sin Yi cos Po - sin Yi sin Pq) + fr cos y\ G. + /?(sin Pj,-1-2 cos Po)-fe-o (35) Y (/i + Д gin (x) P - P R sin Pi + (R cos Pi - las)Pt + (R sin y - IgS sin Yi) G R (sin Po+f2cosp )-fe/-o (36) где P2 = Po - Pxi P3 = Po - и; Yx = Y - Pi и Ya = 7 - Po-Чтобы определить расчетную величину усилия Р, создаваемого пружиной, найдем из уравнения (36) минимальное усилие iV2min в течение одного оборота: , -G [/? COSY-/о5 cos (Y-Pi)l = 0, откуда величина угла yi соответствующая A2min> Y=n-arctg и las sin Pi -ctg Pi (h+Rsm\i) P-PnR sin Pi-f (ficospi- - losPt + IR sin y - sin (y- Pi)] G 2 mm R (Sin Po 4-fa cos Po) - fe/-o (37) 173 Установим охранное оборудование. Тел. . Звоните! |